自动驾驶控制 - 基于运动学模型的MPC算法路径跟踪仿真
自动驾驶控制-基于运动学模型的MPC算法路径跟踪仿真 matlab和simulink联合仿真,运动学模型实现的MPC横向控制,可以跟踪双移线,五次多项式, 以及其他各种自定义路径。
最近在研究自动驾驶控制中的路径跟踪问题,尝试了基于运动学模型的MPC算法,并通过Matlab和Simulink进行了联合仿真。今天就来和大家分享一下这个过程中的一些发现和体会😃。
一、运动学模型实现的MPC横向控制
在自动驾驶中,横向控制是确保车辆沿着预定路径行驶的关键。基于运动学模型的MPC算法能够有效地处理这个问题。运动学模型描述了车辆在二维平面上的运动,通常包括车辆的位置、速度和转向角度等变量。
我们先来看一下简单的运动学模型代码示例:
% 运动学模型参数
L = 2; % 车辆轴距
dt = 0.1; % 时间步长
% 状态变量
x = 0; % 车辆位置x
y = 0; % 车辆位置y
theta = 0; % 车辆航向角
v = 1; % 车辆速度
% 控制输入
delta = 0; % 转向角度
% 运动学模型更新
x_dot = v * cos(theta);
y_dot = v * sin(theta);
theta_dot = (v / L) * tan(delta);
x = x + x_dot * dt;
y = y + y_dot * dt;
theta = theta + theta_dot * dt;这段代码简单地定义了车辆的运动学模型,通过速度、航向角和转向角度来更新车辆的位置和航向。每一个时间步长dt,都会根据当前的状态和控制输入来计算下一时刻的状态。
MPC算法则是在这个运动学模型的基础上,根据预测的未来状态和目标路径,来计算最优的控制输入,使得车辆能够尽可能地跟踪目标路径。
二、跟踪双移线、五次多项式以及其他各种自定义路径
双移线跟踪
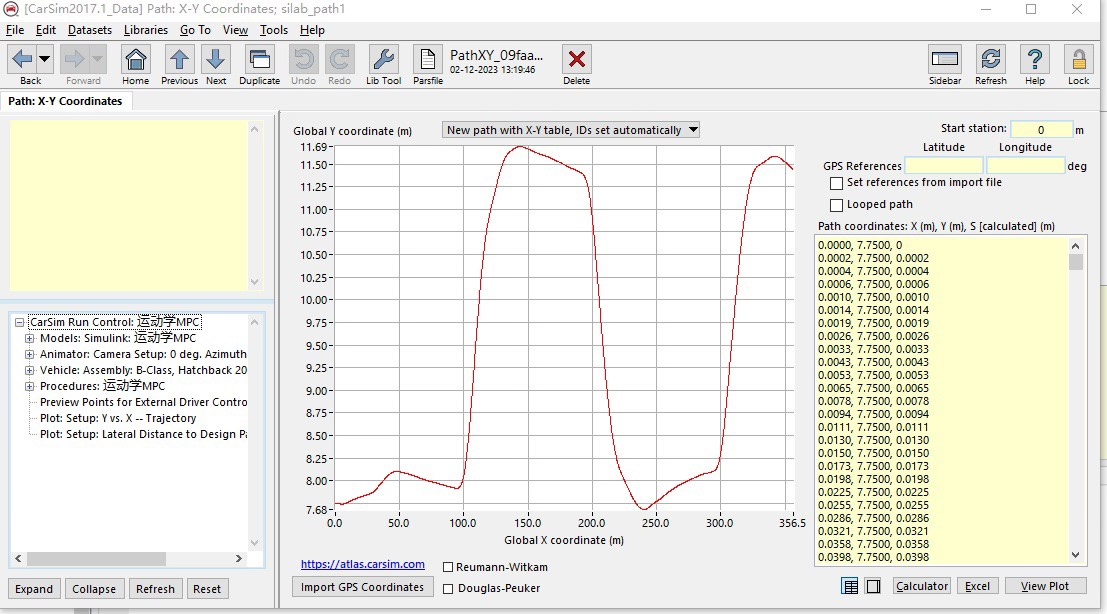
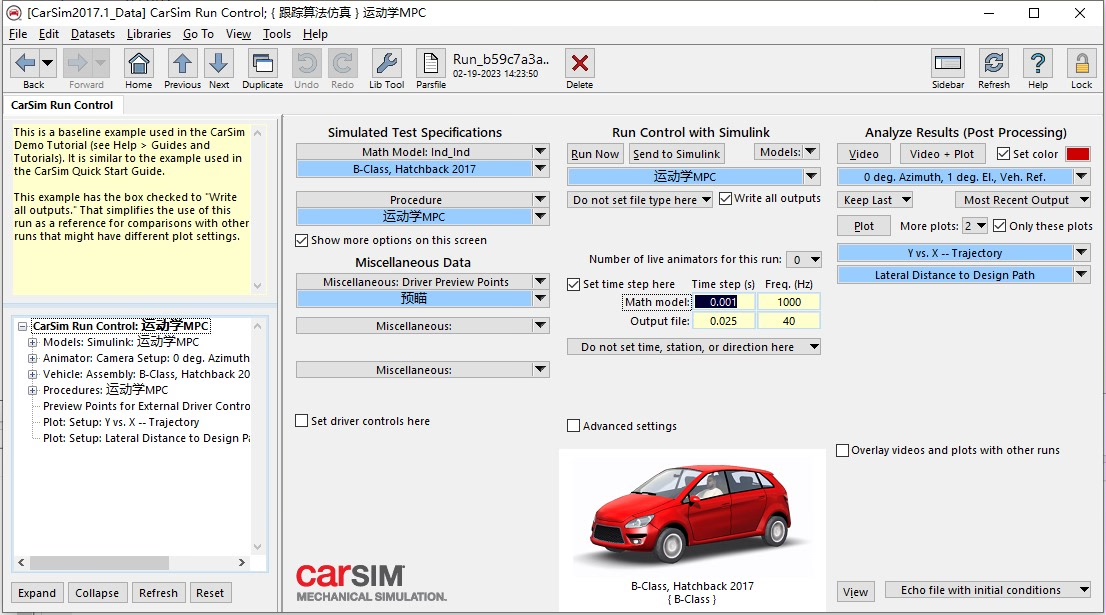
双移线是一种常用的测试路径,它能够检验车辆在复杂弯道上的跟踪性能。通过MPC算法,我们可以让车辆成功地跟踪双移线路径。在Simulink中,我们可以搭建相应的模型,将运动学模型和MPC控制器结合起来。
自动驾驶控制-基于运动学模型的MPC算法路径跟踪仿真 matlab和simulink联合仿真,运动学模型实现的MPC横向控制,可以跟踪双移线,五次多项式, 以及其他各种自定义路径。
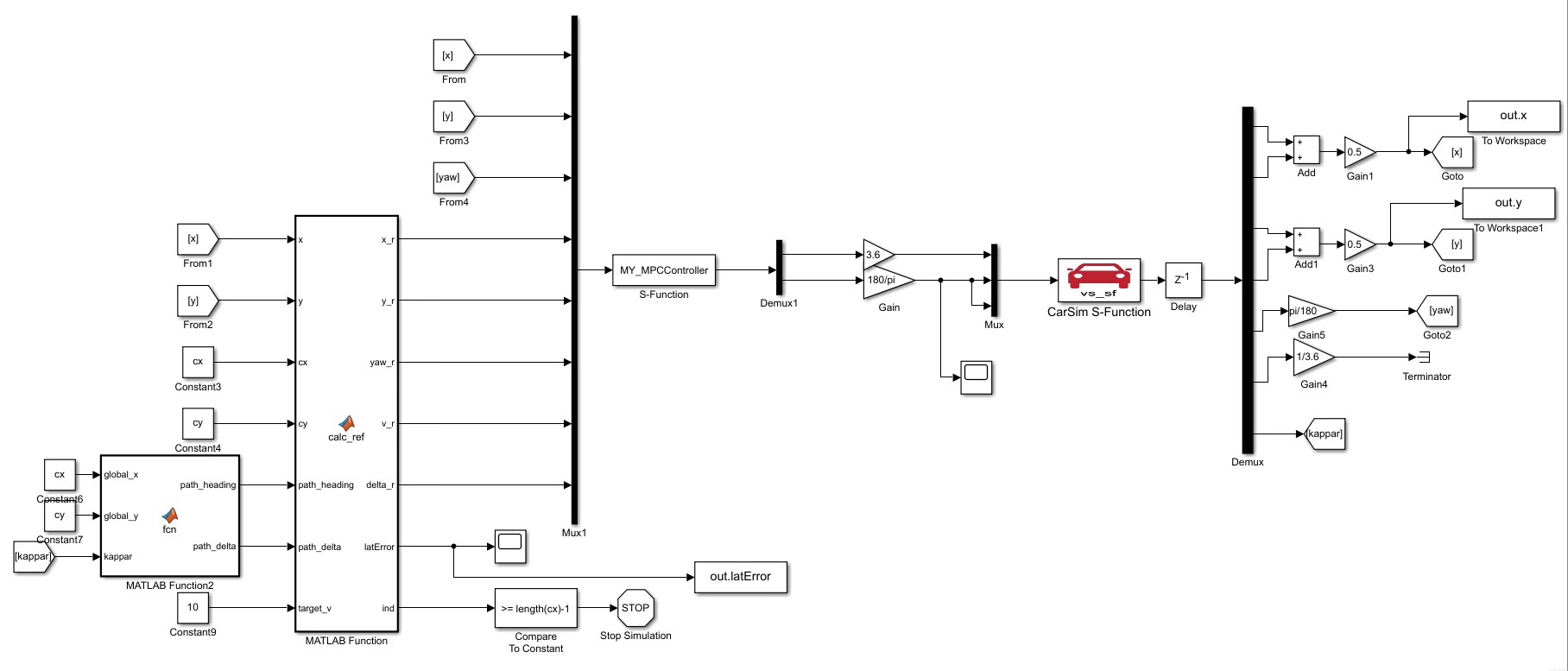
例如,在Simulink模型中,我们有一个路径生成模块生成双移线路径,然后将路径信息传递给MPC控制器。MPC控制器根据车辆当前的状态(位置、速度、航向等)和路径信息,计算出最优的转向角度控制输入,再将这个控制输入应用到运动学模型中,从而实现车辆对双移线路径的跟踪。
五次多项式跟踪
五次多项式路径可以提供更加平滑的轨迹。我们可以定义一个五次多项式函数来生成路径:
% 五次多项式路径参数
a = [1 2 3 4 5 6]; % 多项式系数
% 生成五次多项式路径
t = 0:0.1:10;
x_path = a(1) + a(2)*t + a(3)*t.^2 + a(4)*t.^3 + a(5)*t.^4 + a(6)*t.^5;
y_path = 2*a(1) + 3*a(2)*t + 4*a(3)*t.^2 + 5*a(4)*t.^3 + 6*a(5)*t.^4 + 7*a(6)*t.^5;同样,在Simulink中,我们将这个生成的五次多项式路径作为目标路径输入到MPC控制器中,车辆就会尝试跟踪这条平滑的路径。
自定义路径跟踪
除了双移线和五次多项式路径,我们还可以根据自己的需求生成各种自定义路径。这就需要我们灵活运用数学知识来定义路径函数。比如,我们可以使用分段函数或者其他复杂的曲线函数来生成独特的路径,然后通过MPC算法让车辆去跟踪它。
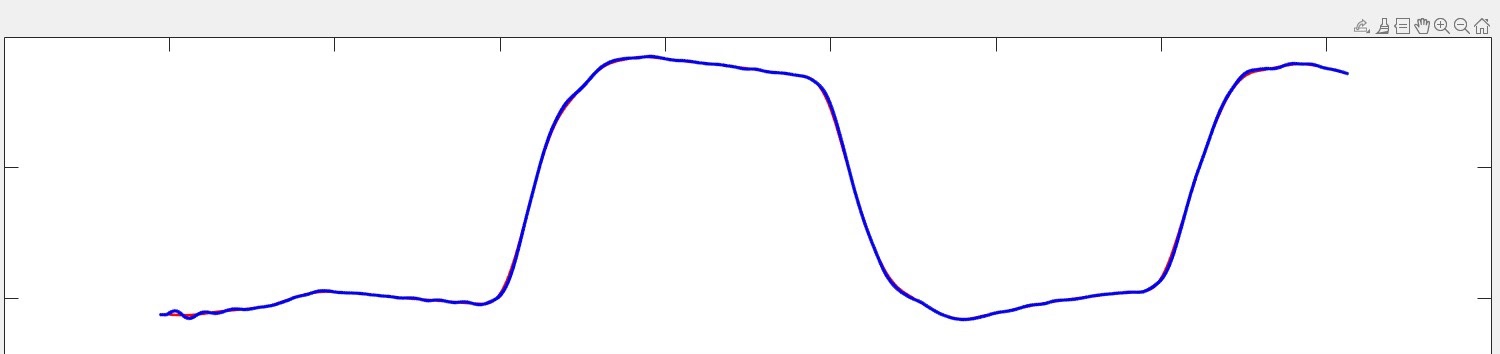
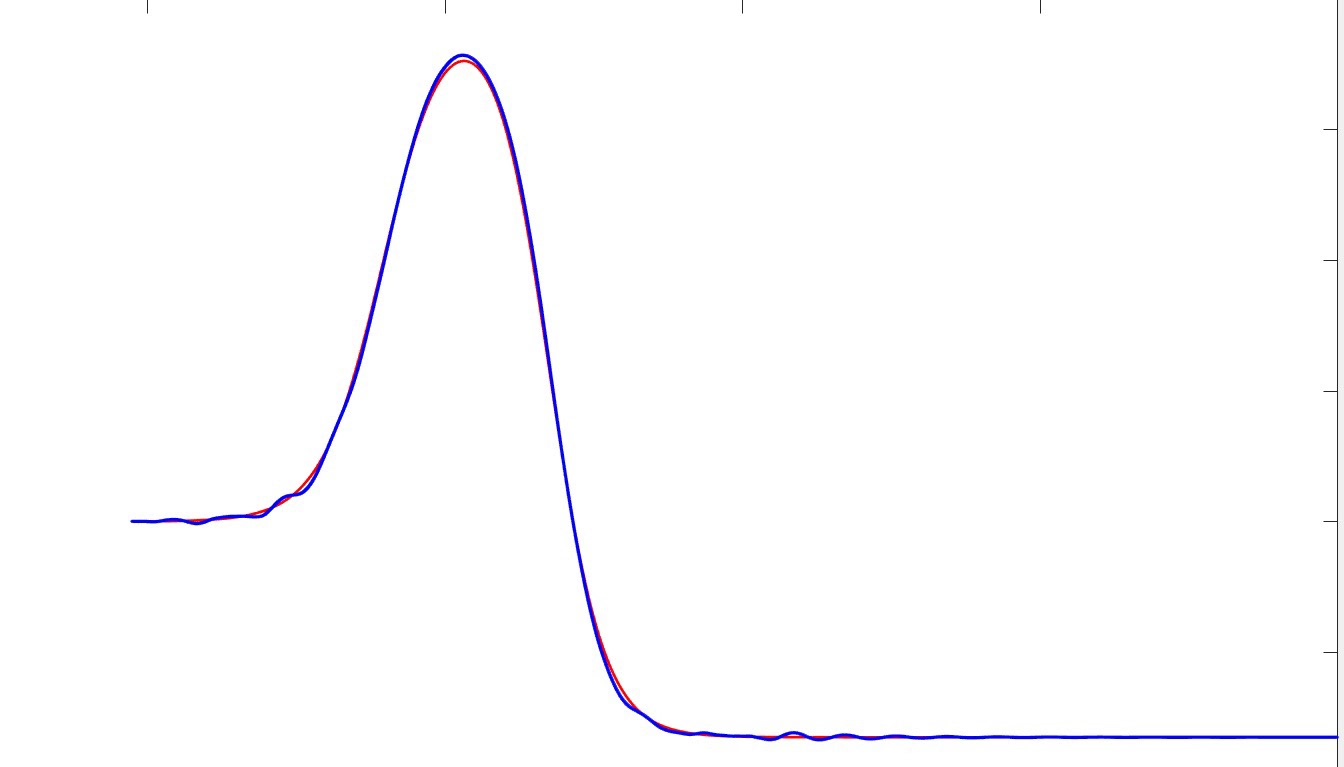
在整个仿真过程中,我们可以观察车辆的轨迹、速度变化等情况,来评估MPC算法在不同路径跟踪任务中的性能。通过调整MPC控制器的参数,如预测时域、控制时域、权重矩阵等,我们可以进一步优化车辆的跟踪效果,使其能够更好地适应各种复杂的路径。
通过这次基于运动学模型的MPC算法路径跟踪仿真,我对自动驾驶控制有了更深入的理解。Matlab和Simulink的联合仿真平台为我们提供了一个非常方便的工具,让我们能够快速验证和优化各种控制算法。希望这篇分享对大家了解自动驾驶路径跟踪有所帮助😄!
以上就是我这次仿真的一些总结,后续还会继续探索更多关于自动驾驶的有趣内容😉。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 4
4 0
0- 0



 已为社区贡献12条内容
已为社区贡献12条内容

所有评论(0)