电机控制仿真分析:探索电机领域的多样可能
电机控制仿真分析 研究方向为电机控制,有丰富的仿真模型搭建经验,涉及:永磁同步电机,开关磁阻电机,同步磁阻电机,直流无刷电机,直流电机以及各种中高速电机。 控制主要包括滑模控制,模糊控制,ADRC控.制,各种无位置传感器控制转矩控制,电流/电压斩波控制,多电机协同控制,以及各种智能算法控制方案。 另有匝间短路故障,转子断条故障等多种故障分析仿真。
在电机控制这片技术海洋里,我算得上是个“老水手”啦,这些年一直深耕于此,积累了不少关于仿真模型搭建的经验,今天就来和大家唠唠。
丰富的电机类型
永磁同步电机(PMSM)、开关磁阻电机(SRM)、同步磁阻电机(SynRM)、直流无刷电机(BLDC)、直流电机,还有各种中高速电机,都是我打交道的“老伙计”。就拿永磁同步电机来说,它凭借高效、功率密度大等优点,在电动汽车、工业伺服系统等领域大放异彩。
电机控制仿真分析 研究方向为电机控制,有丰富的仿真模型搭建经验,涉及:永磁同步电机,开关磁阻电机,同步磁阻电机,直流无刷电机,直流电机以及各种中高速电机。 控制主要包括滑模控制,模糊控制,ADRC控.制,各种无位置传感器控制转矩控制,电流/电压斩波控制,多电机协同控制,以及各种智能算法控制方案。 另有匝间短路故障,转子断条故障等多种故障分析仿真。
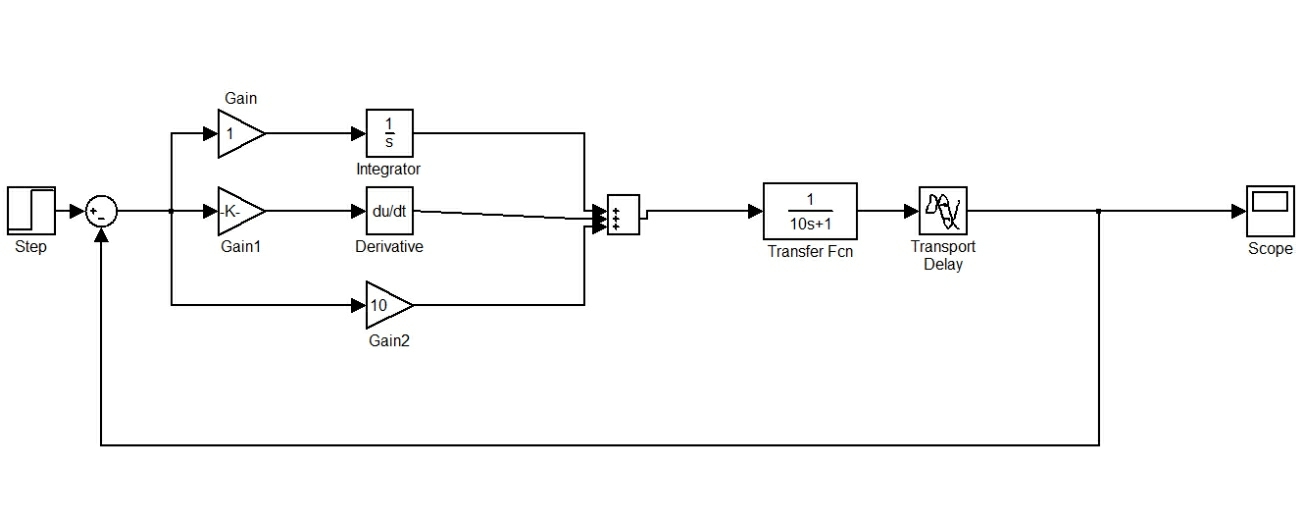
下面简单给大家展示一段永磁同步电机在Matlab/Simulink里搭建的简单模型代码片段(当然实际应用要复杂得多):
% 定义永磁同步电机参数
P = 4; % 极对数
Rs = 0.8; % 定子电阻
Ld = 0.008; % d轴电感
Lq = 0.008; % q轴电感
psi_f = 0.175; % 永磁体磁链
% 这里的参数定义为后续电机模型的动态仿真提供基础,极对数、电阻、电感等参数影响着电机的转矩、转速等性能开关磁阻电机也很有趣,结构简单、成本低,特别适合一些对成本敏感的应用场景。它的运行原理和永磁同步电机有很大不同,主要基于磁阻最小原理运行。
多元的控制策略
- 滑模控制:滑模控制以其对系统参数变化和外部干扰的强鲁棒性在电机控制里颇受青睐。它的核心思想就是让系统状态在特定的“滑动模态”上运动。
% 滑模控制简单代码示意
% 定义滑模面参数
lambda = 10;
s = lambda*error + diff(error); % 滑模面函数,error为转速误差
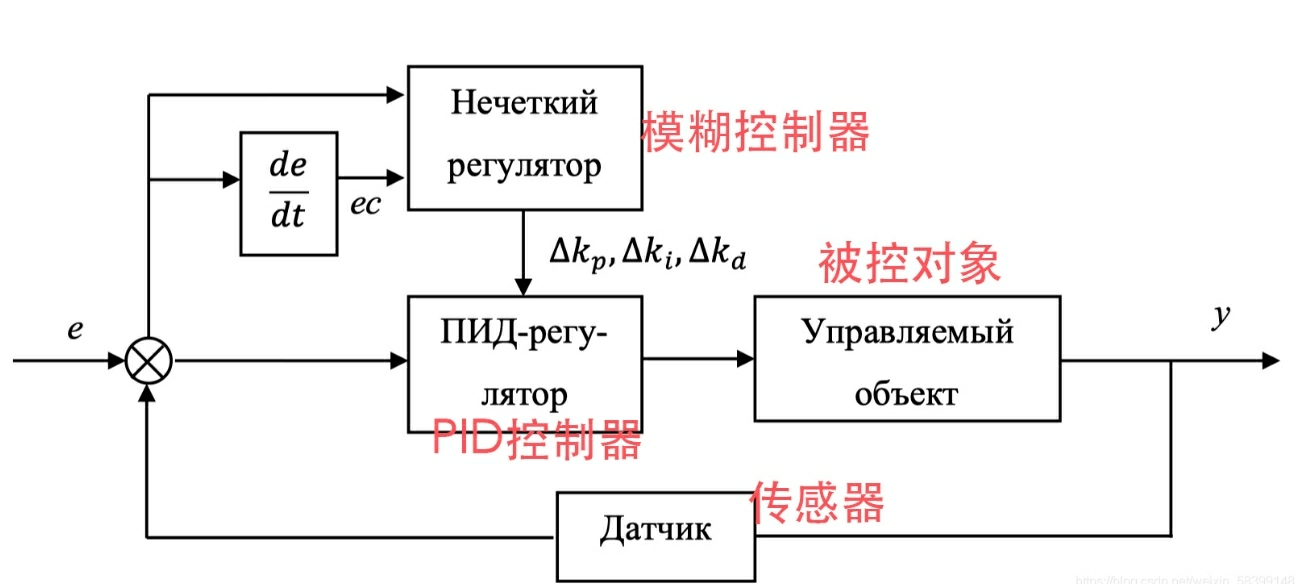
% 这里通过定义滑模面参数和滑模面函数,为后续确定控制律做准备,lambda参数影响着系统趋近滑模面的速度- 模糊控制:模糊控制就像给电机控制加了个“智能大脑”,它能把人类的模糊语言经验转化为精确的控制策略。比如说根据电机的转速偏差和偏差变化率这些模糊输入,经过模糊推理得出合适的控制量。
% 模糊控制初步设置
fisMat = newfis('fuzzy_speed_controller'); % 创建模糊推理系统
% 这里创建了一个模糊推理系统,后续还需要定义输入输出变量、隶属度函数、模糊规则等,来实现完整的模糊控制策略- ADRC控制:自抗扰控制(ADRC)可以说是把系统的不确定性都当成“干扰”来处理,然后进行估计和补偿。它能在不依赖精确模型的情况下实现良好的控制效果。
除了这些,还有各种无位置传感器控制、转矩控制、电流/电压斩波控制,多电机协同控制以及各种智能算法控制方案。像无位置传感器控制,对于降低系统成本、提高可靠性有着重要意义,通过对电机的电流、电压等信号进行处理来估算转子位置和速度。
故障分析仿真
电机运行过程中难免会出点“小状况”,匝间短路故障、转子断条故障等都可能影响电机性能甚至导致停机。通过故障分析仿真,我们能提前发现问题,找到应对策略。比如说在匝间短路故障仿真里,我们可以改变电机绕组的参数来模拟短路情况,观察电机电流、转矩等参数的变化。
% 匝间短路故障模拟示意
% 假设短路匝数比例为short_ratio
short_ratio = 0.1;
Rs_short = Rs*(1 - short_ratio); % 考虑短路后的定子电阻变化
% 这里通过改变定子电阻来简单模拟匝间短路故障对电机参数的影响,进而观察电机整体性能变化电机控制仿真分析是个既有趣又充满挑战的领域,每一种电机类型、每一种控制策略、每一次故障分析,都像是打开一扇通往新技术的门,期待和大家一起继续探索。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 8
8 0
0- 0



 已为社区贡献10条内容
已为社区贡献10条内容

所有评论(0)