IF 开环启动切龙伯格观测器 Matlab/simulink 仿真探索
IF开环启动切龙伯格观测器 Matlab/simulink仿真搭建模型: 提供以下帮助 波形纪录 参考文献 仿真文件 原理解释 电机参数说明 仿真原理结构和整体框图
在电机控制领域,IF(感应电机)的开环启动切换到龙伯格观测器的过程是一个重要研究方向。通过 Matlab/simulink 搭建模型进行仿真,能让我们更直观地理解和分析这个过程。
一、原理解释
- IF 开环启动
- 开环启动简单来说,就是在启动电机时,不依赖电机实际的运行反馈信息。比如,我们直接给定电机一个固定的电压频率组合来启动它。这种方式简单直接,但在复杂工况下,电机性能可能得不到很好的保障。
- 在 Matlab/simulink 中,可以通过简单的信号发生器模块来产生启动所需的电压和频率信号。例如,使用“Sine Wave”模块来模拟频率逐渐上升的正弦电压信号作为电机的输入。代码角度,虽然在 simulink 图形化建模中没有传统代码,但可以理解为在底层,模块之间的数据交互和信号处理遵循一定的算法逻辑。就像这个正弦波信号的产生,在底层其实是按照正弦函数的数学公式在固定的时间步长下进行计算和输出的。 - 龙伯格观测器
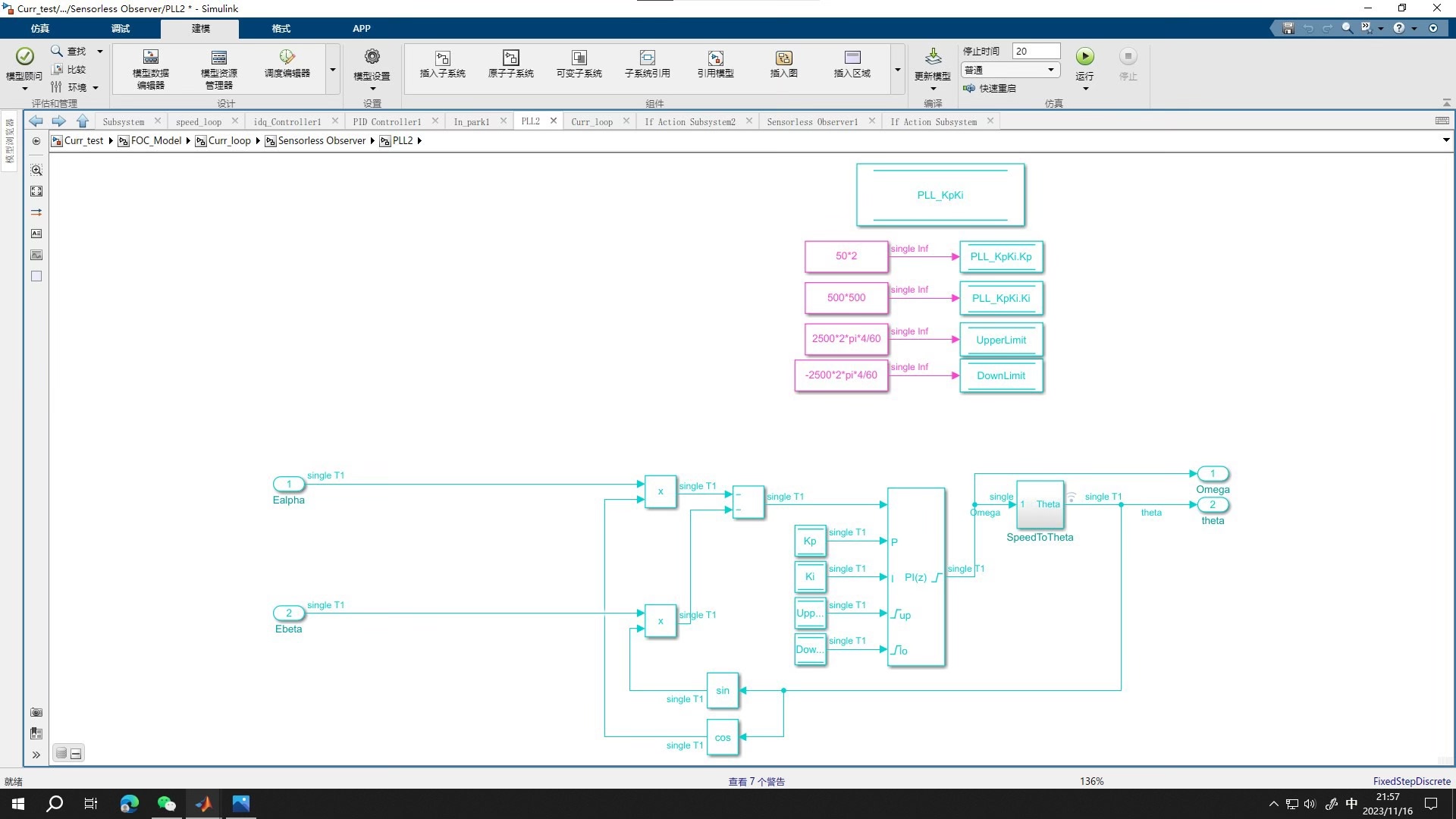
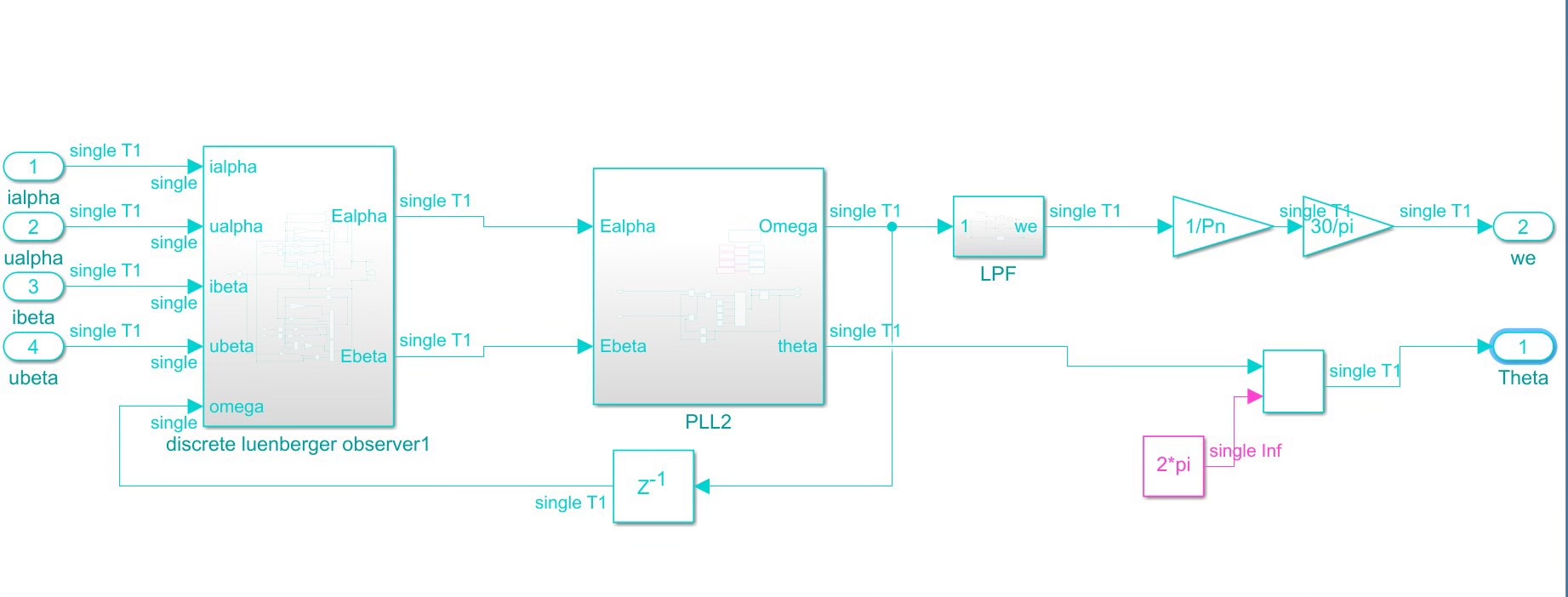
- 龙伯格观测器是一种状态观测器,它的主要作用是根据系统的输入和输出,估计出系统内部无法直接测量的状态变量。对于感应电机,它可以估计诸如转子磁链等关键状态。
- 其基本原理基于反馈校正机制。假设有一个系统的状态方程为 \(\dot{x}=Ax + Bu\),输出方程为 \(y = Cx\),龙伯格观测器通过构建一个估计状态 \(\hat{x}\) 的动态方程 \(\dot{\hat{x}} = A\hat{x}+Bu + L(y - C\hat{x})\),其中 \(L\) 是观测器增益矩阵。这个增益矩阵 \(L\) 的选择很关键,它决定了观测器的收敛速度和估计精度。在代码实现中(这里假设使用 Matlab 脚本语言辅助理解),我们可以通过一些算法来计算这个 \(L\) 矩阵。例如,如果已知系统矩阵 \(A\)、输出矩阵 \(C\) 和期望的观测器极点配置向量 \(p\),可以使用place函数来计算 \(L\) 矩阵,代码如下:
A = [1 2; 3 4]; % 假设的系统矩阵 A
C = [1 0]; % 假设的输出矩阵 C
p = [-5 -6]; % 期望的观测器极点
L = place(A',C',p)' % 计算观测器增益矩阵 L这段代码中,首先定义了系统矩阵 \(A\) 和输出矩阵 \(C\),然后设定了期望的观测器极点 \(p\),最后通过 place 函数计算出观测器增益矩阵 \(L\)。在 simulink 模型中,这个 \(L\) 矩阵就用于龙伯格观测器模块的参数设置。
二、电机参数说明
在仿真中,电机参数对整个系统的性能有很大影响。常见的感应电机参数包括:
- 定子电阻 \(R_s\):它影响电机的定子电流和铜耗。一般来说,阻值越大,相同电压下定子电流越小,铜耗也会有所变化。在 simulink 电机模型参数设置中,这个值需要根据实际电机的规格准确输入。
- 转子电阻 \(R_r\):主要影响电机的转子电流和转差率。它与电机的电磁转矩等性能密切相关。例如,在计算电机的电磁转矩公式中就包含转子电阻这个参数。
- 定子电感 \(Ls\) 和转子电感 \(Lr\):这两个电感参数影响电机的磁链建立和电磁能量转换。它们的值会影响电机的瞬态和稳态性能。
- 互感 \(L_m\):它在电机的磁场耦合中起关键作用,直接影响电机的电磁转矩和功率因数等性能指标。
三、仿真原理结构和整体框图
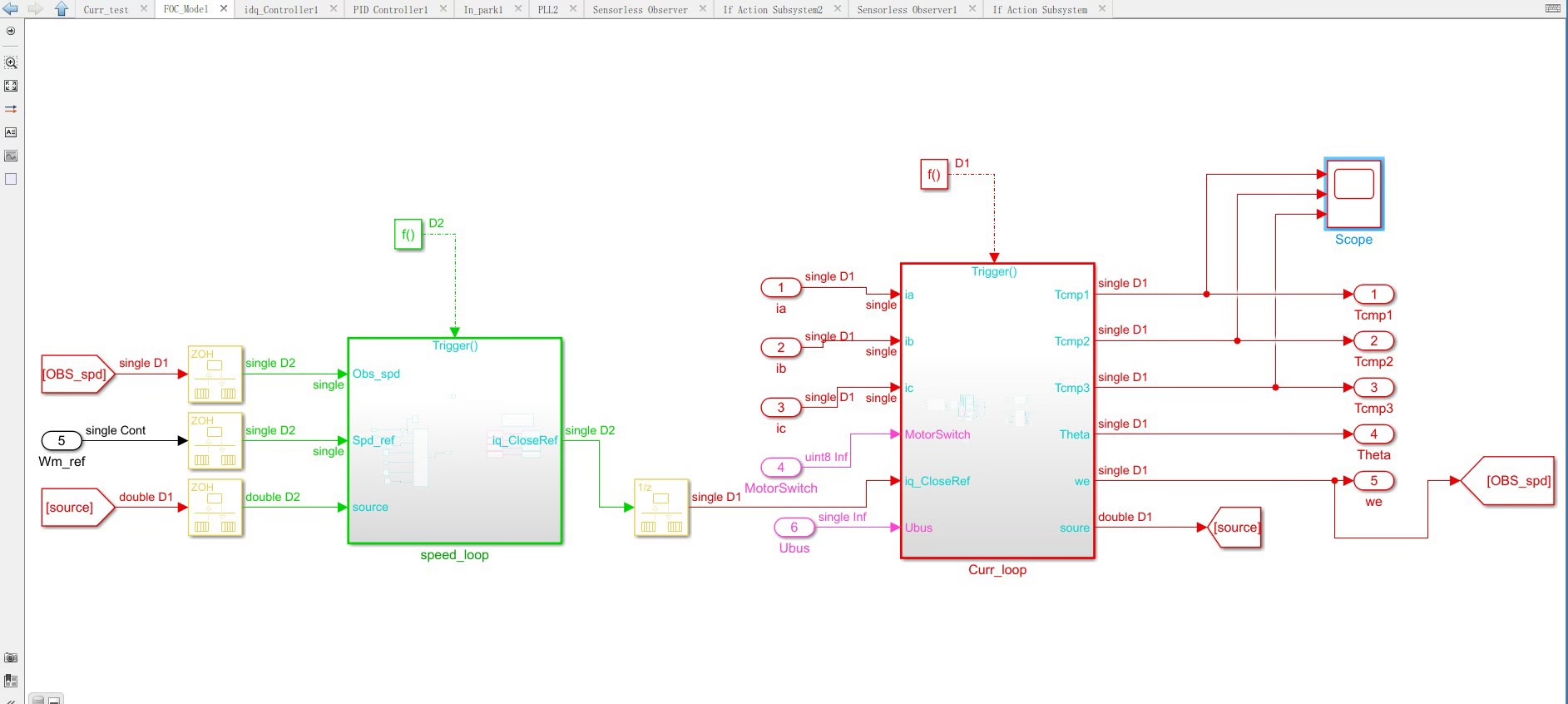
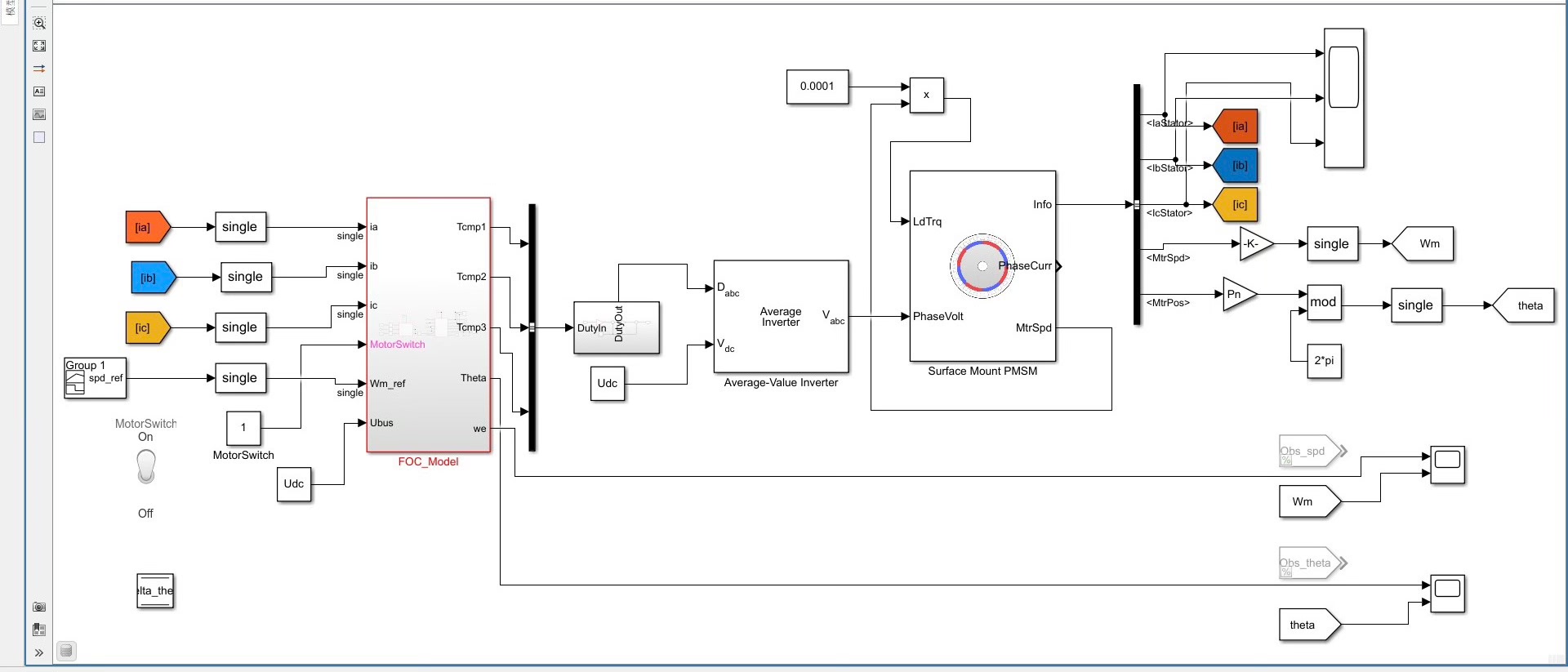
- 整体框图
- 整个仿真模型的顶层框图通常包含几个主要部分:信号输入模块、电机模型模块、龙伯格观测器模块以及波形记录和分析模块。
- 信号输入模块负责产生开环启动所需的电压和频率信号,如前文提到的用正弦波信号发生器模拟启动电压。电机模型模块是整个系统的核心,它接收输入信号并输出电机的各种运行参数,如转速、转矩等。龙伯格观测器模块则根据电机的输入和输出估计内部状态变量。波形记录和分析模块用于记录和展示各个关键信号的波形,方便我们分析系统性能。 - 模块连接关系
- 信号输入模块的输出连接到电机模型的电压和频率输入端口。电机模型的输出,比如转速、定子电流等信号,一方面反馈到波形记录模块,另一方面部分信号(如定子电流和转速等可测量输出)输入到龙伯格观测器模块。龙伯格观测器模块估计出的状态变量,如转子磁链等,也可以反馈到波形记录模块进行观察和分析。
四、波形纪录
在仿真过程中,记录关键波形能帮助我们深入理解系统运行情况。
- 转速波形:在开环启动阶段,转速通常会随着给定的电压频率信号逐渐上升。当切换到龙伯格观测器后,转速波形可能会出现一些细微的调整,这是因为观测器开始对电机的状态进行估计和校正。如果观测器设计得当,转速会较快地稳定在设定值附近,并且波动较小。
- 定子电流波形:启动瞬间,定子电流会有一个较大的冲击,这是因为电机在静止状态下需要克服惯性启动。随着电机转速上升,电流会逐渐减小并稳定在一个与负载相关的值。当切换到龙伯格观测器后,电流波形可能会因为观测器对电机状态的校正而有一些小的波动,但整体趋势应该还是围绕稳定运行值波动。在 simulink 中,可以通过“Scope”模块直接观察这些波形,非常直观。
五、参考文献
在研究 IF 开环启动切龙伯格观测器的过程中,有很多优秀的参考文献可以帮助我们深入理解相关原理和方法。例如《电机学》这本书详细介绍了感应电机的基本原理,为我们理解电机参数和运行机制提供了基础。还有一些学术论文,如“Design and Implementation of a Luenberger Observer for Induction Motor Control”,它深入探讨了龙伯格观测器在感应电机控制中的设计和实现细节,对我们搭建仿真模型有很大的指导意义。
六、仿真文件
仿真文件是我们进行模型搭建和仿真运行的基础。在 Matlab/simulink 中,创建的仿真文件(.slx 格式)包含了整个模型的所有模块和连接关系。通过设置不同的仿真参数,如仿真时间、步长等,可以对不同工况下的系统进行仿真。同时,保存好仿真文件便于我们后续对模型进行修改、优化以及与他人分享交流。可以将仿真文件分享在一些专业的学术论坛或者团队内部,方便大家共同研究和探讨。
IF开环启动切龙伯格观测器 Matlab/simulink仿真搭建模型: 提供以下帮助 波形纪录 参考文献 仿真文件 原理解释 电机参数说明 仿真原理结构和整体框图
通过以上对 IF 开环启动切龙伯格观测器 Matlab/simulink 仿真的各个方面介绍,希望能帮助大家更好地理解和搭建相关模型,深入探索感应电机控制领域的奥秘。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐



 3
3 0
0- 0



 已为社区贡献16条内容
已为社区贡献16条内容

所有评论(0)