网联时代下纯电动汽车经济性车速规划探索
纯电动汽车,新能源汽车经济性驾驶,生态驾驶,基于交通信息的能量优化,车速规划。 考虑交通信号灯,其他交通参与者等状态信息。 基于网联信息的经济性车速规划算法研究。 针对多信号灯路口,基于单信号灯路口通行参考时间推导,求解车速限制范围内到达各信号灯路口的期望时间区间,求解通行效率最优的参考时间区间。 基于模型预测控制算法,考虑车辆冲击度、能耗经济性和参考车速的最大最小限制情况进行目标函数构建,将最优问题转化为非线性规划问题,利用序列二次规划算法求解经济性车速轨迹。 由于涉及到交通环境和MPC问题构造和控制,需要安装和配置sumo与MATLAB联合仿真环境,另外还需要安装casadi作为模型预测控制求解器,通过。 环境不会配置也可以支持远程付费指导安装,依据软件多少默认50-100不等。 对应程序原理说明文档,参考文献,以及对应的论文原理说明。
在新能源汽车的发展浪潮中,纯电动汽车凭借其环保节能的特性逐渐成为主流。而实现新能源汽车的经济性驾驶,也就是生态驾驶,是进一步挖掘其节能潜力的关键。今天咱就来聊聊基于交通信息的能量优化中的车速规划问题。
基于网联信息的车速规划算法核心思路
我们的目标是实现基于网联信息的经济性车速规划算法。这里面很重要的一点就是要考虑交通信号灯以及其他交通参与者等状态信息。
多信号灯路口车速规划
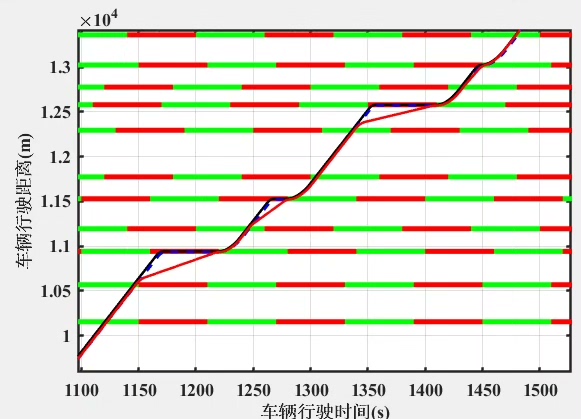
对于多信号灯路口,咱们得基于单信号灯路口通行参考时间来推导。怎么理解呢?就是要在车速限制范围内,去求解到达各信号灯路口的期望时间区间,进而找到通行效率最优的参考时间区间。这就好比我们要规划一条去目的地的路线,每个信号灯路口就是一个个小目标点,我们得算好什么时候到达这些点,车能走得又快又省。
模型预测控制算法(MPC)的运用
接下来就是基于模型预测控制算法了。在构建目标函数的时候,我们要考虑车辆冲击度、能耗经济性以及参考车速的最大最小限制情况。简单说,就是要让车开得平稳、省油,同时车速也得在合理范围内。这样一来,就把最优问题转化为了非线性规划问题。这里我们可以借助序列二次规划算法来求解经济性车速轨迹。
代码实现思路
下面咱们简单看看代码实现的一些思路,这里以Python为例(实际应用中会涉及到更多专业工具和语言,这里只为展示逻辑)。
构建目标函数
import numpy as np
# 定义车辆相关参数
mass = 1000 # 车辆质量(kg)
drag_coefficient = 0.3 # 风阻系数
frontal_area = 2 # 迎风面积(m^2)
rolling_resistance_coefficient = 0.01 # 滚动阻力系数
gravity = 9.81 # 重力加速度(m/s^2)
# 速度范围限制
min_speed = 10 # 最小速度(m/s)
max_speed = 30 # 最大速度(m/s)
def objective_function(speed):
# 计算空气阻力
air_resistance = 0.5 * drag_coefficient * frontal_area * speed ** 2
# 计算滚动阻力
rolling_resistance = rolling_resistance_coefficient * mass * gravity
# 综合阻力
total_resistance = air_resistance + rolling_resistance
# 能耗与阻力相关,这里简单假设能耗与阻力成正比
energy_consumption = total_resistance * speed
# 冲击度简单假设与速度变化率有关,这里先不考虑复杂情况
jerk = 0
# 构建目标函数,综合考虑能耗和冲击度
objective = energy_consumption + 0.1 * jerk
return objective在这段代码里,我们首先定义了车辆的一些基本参数,像质量、风阻系数这些。然后构建了目标函数 objective_function,这里面计算了空气阻力、滚动阻力,进而得到能耗,并且简单假设了冲击度,最后综合起来得到目标函数的值。这个值就是我们要优化的目标,让它越小越好。
求解车速轨迹
from scipy.optimize import minimize
# 初始猜测速度
initial_guess = np.array([20])
# 定义速度范围约束
bounds = [(min_speed, max_speed)]
# 调用优化函数求解
result = minimize(objective_function, initial_guess, bounds=bounds)
optimal_speed = result.x[0]
print(f"最优车速为: {optimal_speed} m/s")这段代码使用了 scipy.optimize 库中的 minimize 函数来求解最优车速。我们先给出一个初始猜测速度,然后定义速度范围的约束,最后调用 minimize 函数,它会根据我们定义的目标函数和约束条件来找到最优的车速。
联合仿真环境搭建
由于涉及到交通环境和MPC问题构造和控制,我们需要安装和配置sumo与MATLAB联合仿真环境。另外,还需要安装casadi作为模型预测控制求解器。
sumo安装与配置
sumo是一个开源的交通仿真软件。在Linux系统下,一般可以通过包管理器来安装,比如在Ubuntu系统中:
sudo add-apt-repository ppa:sumo/stable
sudo apt-get update
sudo apt-get install sumo sumo-tools安装完成后,还需要配置环境变量,让系统能找到sumo的相关工具。在 ~/.bashrc 文件中添加:
export SUMO_HOME=/usr/share/sumo
export PATH=$SUMO_HOME/bin:$PATH然后执行 source ~/.bashrc 使配置生效。
MATLAB配置
在MATLAB中,我们需要设置与sumo的接口。可以通过下载SUMO-MATLAB接口的相关文件,并将其路径添加到MATLAB的搜索路径中。在MATLAB命令行中输入:
addpath('/path/to/sumo - matlab - interface')casadi安装
casadi的安装相对复杂一些,不同系统有不同的安装方式。以Linux系统为例,可以从官网下载源码编译安装:
wget https://github.com/casadi/casadi/releases/download/3.5.5/casadi - 3.5.5 - Linux - 64 - bits.tar.gz
tar - xvf casadi - 3.5.5 - Linux - 64 - bits.tar.gz
cd casadi - 3.5.5 - Linux - 64 - bits
./configure
make
sudo make install安装完成后,在MATLAB中也需要配置一下路径,让MATLAB能调用casadi:
addpath('/path/to/casadi - matlab')要是环境不会配置也别担心,咱这支持远程付费指导安装,依据软件多少默认50 - 100不等。
相关支持文档
对应程序原理说明文档、参考文献以及对应的论文原理说明也都有。这些文档能帮助大家更深入地理解整个算法的原理、实现细节以及背后的理论依据。无论是想要深入研究的同学,还是实际应用中遇到问题需要参考的朋友,这些文档都是很有价值的资料。
纯电动汽车,新能源汽车经济性驾驶,生态驾驶,基于交通信息的能量优化,车速规划。 考虑交通信号灯,其他交通参与者等状态信息。 基于网联信息的经济性车速规划算法研究。 针对多信号灯路口,基于单信号灯路口通行参考时间推导,求解车速限制范围内到达各信号灯路口的期望时间区间,求解通行效率最优的参考时间区间。 基于模型预测控制算法,考虑车辆冲击度、能耗经济性和参考车速的最大最小限制情况进行目标函数构建,将最优问题转化为非线性规划问题,利用序列二次规划算法求解经济性车速轨迹。 由于涉及到交通环境和MPC问题构造和控制,需要安装和配置sumo与MATLAB联合仿真环境,另外还需要安装casadi作为模型预测控制求解器,通过。 环境不会配置也可以支持远程付费指导安装,依据软件多少默认50-100不等。 对应程序原理说明文档,参考文献,以及对应的论文原理说明。
在新能源汽车发展的道路上,基于交通信息的能量优化和车速规划是非常有意义的探索,希望大家都能在这个领域有所收获。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐


 7
7 0
0- 0



 已为社区贡献9条内容
已为社区贡献9条内容

所有评论(0)