自动驾驶横纵向控制仿真分享:从零开始的探索之旅
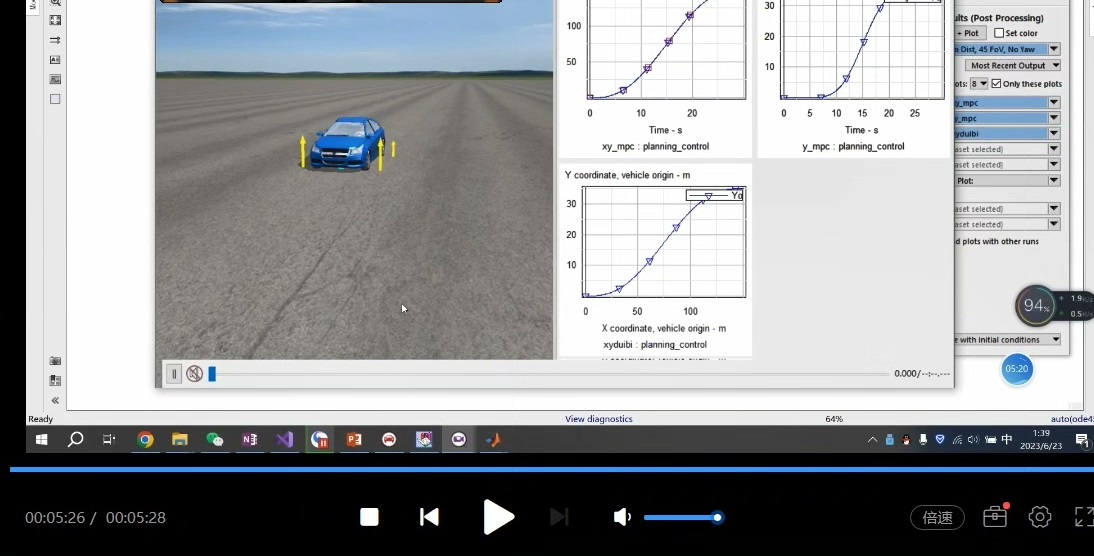
自动驾驶横纵向控制,纵向采用pid控制,横向采用mpc控制,根据的是车辆二自由度车辆动力学模型,得到各矩阵之后在S函数里面进行编写,纵向参考百度Apollo纵向双环PID控制算法,横向参考百度Apollo中mpc控制算法编写,规划的轨迹为五次多项式函数形式。 控制效果:车辆侧向位移和纵向位移跟踪效果很好,纵向车速跟随也较好,但有一定的误差。 Matlab/Simulink版本:2021a Carsim版本:2019.0 有完整的仿真演示运行视频,小白也能学会。 提供参考资料
最近在学习自动驾驶的控制算法,终于完成了横纵向控制的仿真,感觉整个过程挺有成就感的,想和大家分享一下我的学习心得和实现过程。
一、控制算法的选择与实现
纵向控制:PID控制
纵向控制我参考了百度Apollo的双环PID控制算法,这个算法在Apollo的开源代码中用得比较多,实现起来相对直观。PID控制的核心在于调节三个参数:比例系数(P)、积分系数(I)和微分系数(D)。通过调节这三个参数,可以实现对车速的有效控制。
% 纵向PID控制算法实现
function [throttle, brake] = longitudinalPID(current_speed, target_speed, dt)
% PID参数
Kp = 0.5;
Ki = 0.1;
Kd = 0.2;
% 计算误差
error = target_speed - current_speed;
integral = integral + error * dt;
derivative = (error - last_error) / dt;
% 计算控制量
output = Kp * error + Ki * integral + Kd * derivative;
% 分配油门和刹车
if output > 0
throttle = output;
brake = 0;
else
throttle = 0;
brake = -output;
end
% 更新last_error
last_error = error;
end横向控制:MPC控制
横向控制我选择了模型预测控制(MPC),这个算法在Apollo中也有应用,主要通过预测未来的轨迹来优化当前的控制输入。MPC的核心在于建立车辆的动力学模型,并通过求解优化问题来得到最优控制量。
% MPC控制算法实现
function [steering] = mpcControl(state, reference, dt, T)
% 状态变量:[x, y, yaw, v]
% 参考轨迹:五次多项式
% 优化问题求解
% 这里省略优化问题的具体实现,具体可以参考Apollo的MPC实现
% 优化目标:最小化与参考轨迹的偏差
% 约束条件:方向盘转角限制、加速度限制等
% 优化求解
[steering] = optimizeControl(state, reference, dt, T);
end二、车辆动力学模型
我选择了二自由度车辆动力学模型,这个模型可以较好地描述车辆的运动特性,同时又不至于过于复杂。模型主要包括纵向运动学和侧向动力学两部分。
% 车辆动力学模型
function [next_state] = vehicleDynamics(state, control, dt)
% 状态变量:[x, y, yaw, v]
% 控制量:[throttle, brake, steering]
% 计算加速度
acceleration = (throttle - brake) * engine_torque / vehicle_mass;
% 更新纵向速度
next_state.v = state.v + acceleration * dt;
% 计算侧向加速度
lateral_acceleration = next_state.v * tan(steering) / wheelbase;
% 更新 yaw 角速度
yaw_rate = lateral_acceleration / state.v;
% 更新位置
next_state.x = state.x + state.v * cos(state.yaw) * dt;
next_state.y = state.y + state.v * sin(state.yaw) * dt;
% 更新 yaw 角
next_state.yaw = state.yaw + yaw_rate * dt;
end三、仿真效果与分析
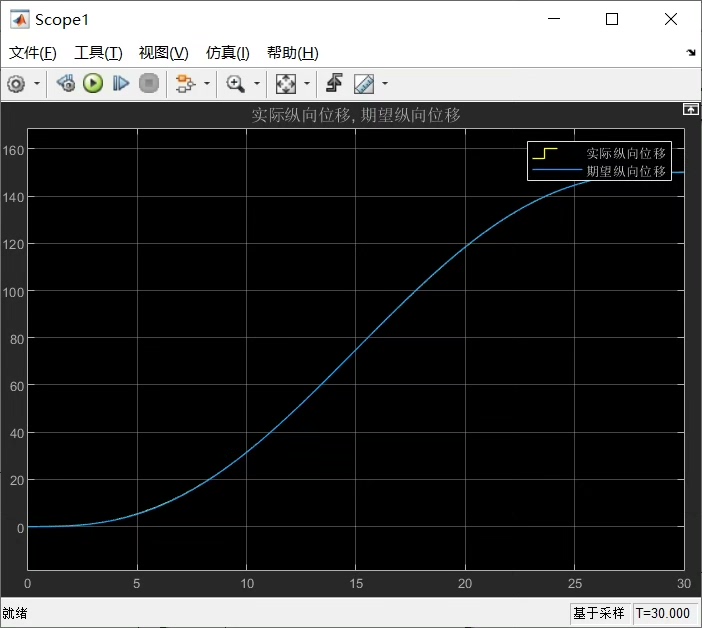
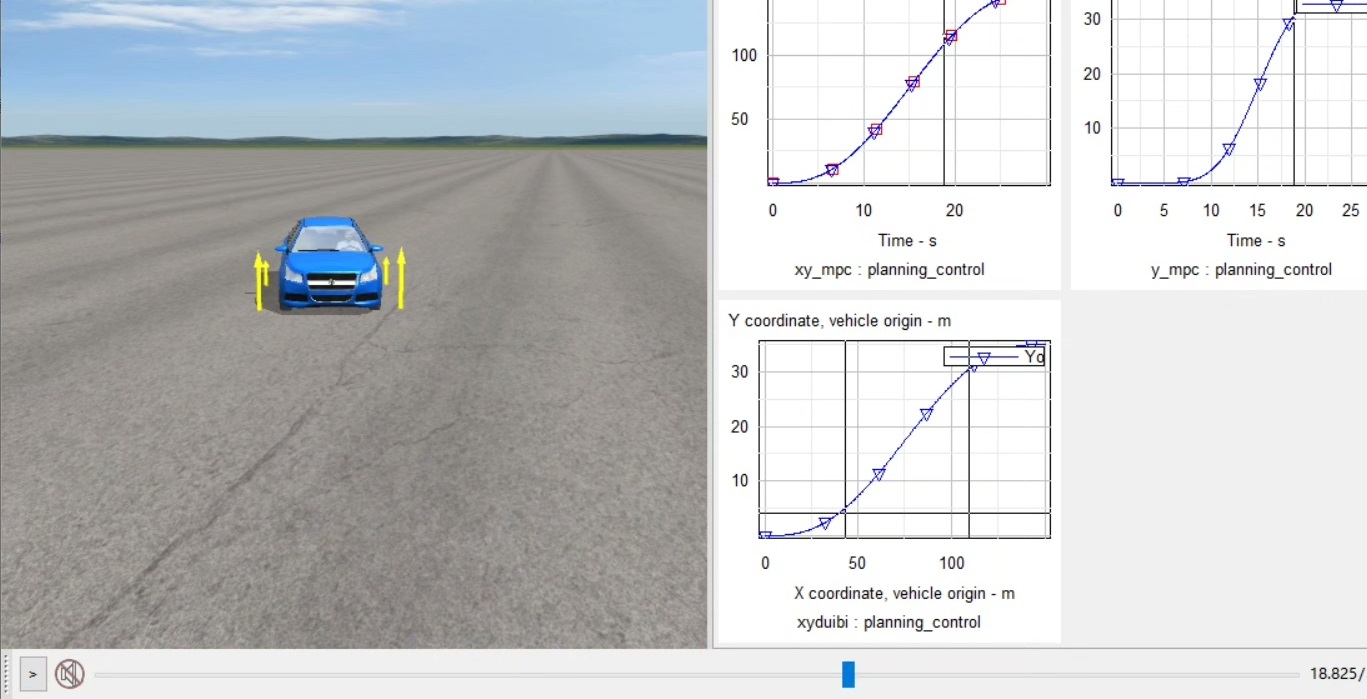
经过多次仿真测试,控制效果总体上还是比较令人满意的。车辆能够很好地跟踪给定的参考轨迹,侧向位移和纵向位移的跟踪误差都控制在较小的范围内,纵向车速也能够较好地跟随目标速度。
自动驾驶横纵向控制,纵向采用pid控制,横向采用mpc控制,根据的是车辆二自由度车辆动力学模型,得到各矩阵之后在S函数里面进行编写,纵向参考百度Apollo纵向双环PID控制算法,横向参考百度Apollo中mpc控制算法编写,规划的轨迹为五次多项式函数形式。 控制效果:车辆侧向位移和纵向位移跟踪效果很好,纵向车速跟随也较好,但有一定的误差。 Matlab/Simulink版本:2021a Carsim版本:2019.0 有完整的仿真演示运行视频,小白也能学会。 提供参考资料
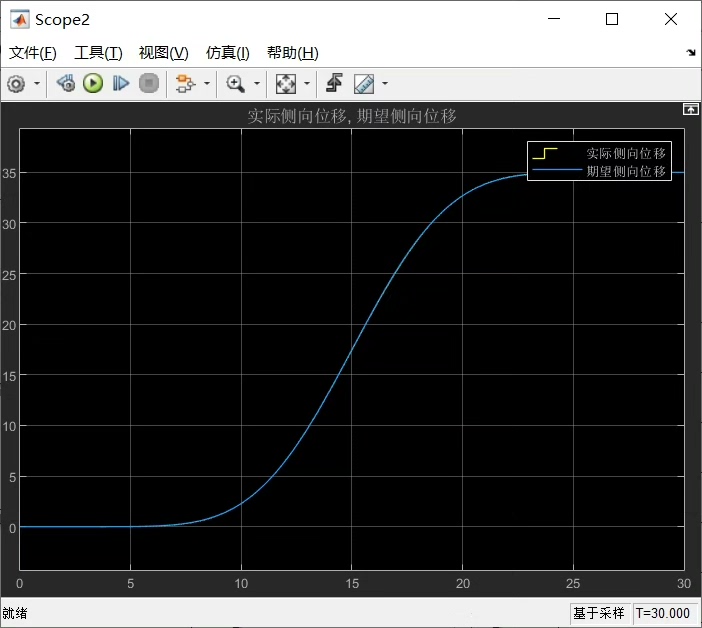
不过也有一些需要改进的地方,比如在高速工况下,纵向速度的跟踪误差会稍微大一些,这可能和PID的参数设置有关,也可能是因为MPC的预测时间窗口设置得不够合理。
四、工具与资源
- Matlab/Simulink版本:2021a
- Carsim版本:2019.0
- 参考资料:
1. 百度Apollo开源代码
2. 《车辆动力学与控制》
3. MPC控制算法相关论文
五、仿真视频演示
为了让各位更直观地了解控制效果,我已经录制了完整的仿真演示视频,相信即使是刚接触自动驾驶控制的小白也能通过视频快速上手。
总的来说,这次的仿真经历让我对自动驾驶的控制算法有了更深入的理解,也让我意识到理论与实践结合的重要性。希望这篇分享对你有所帮助,如果有任何问题,欢迎随时交流!

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐


 0
0 0
0- 0



 已为社区贡献11条内容
已为社区贡献11条内容

所有评论(0)