探索分布式驱动电动汽车七自由度动力学模型及其联合仿真验证
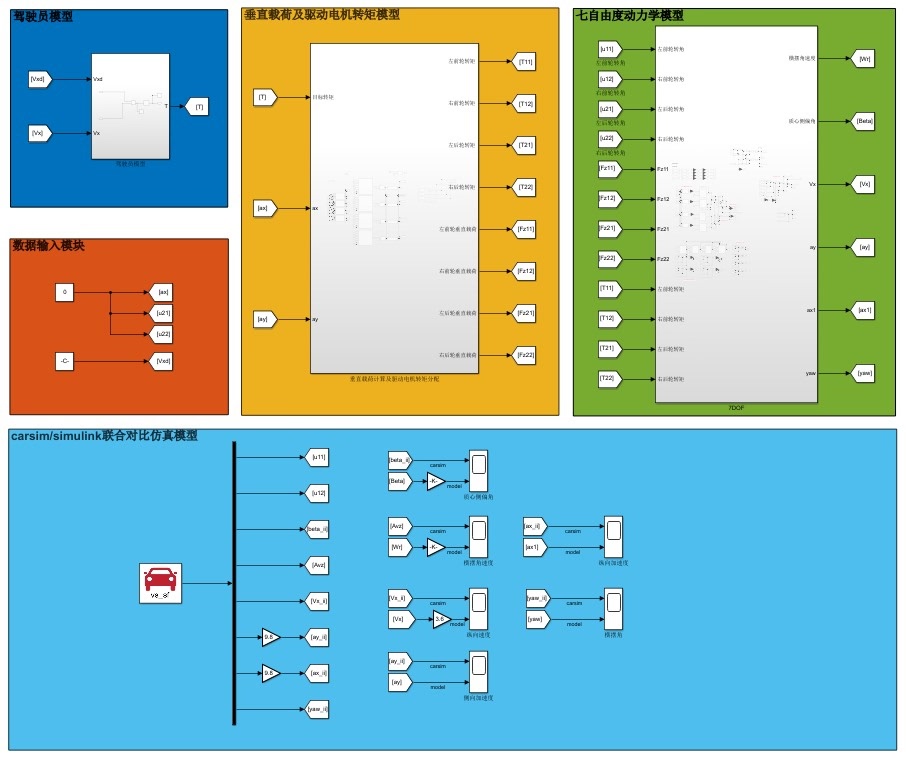
分布式驱动电动汽车七自由度动力学模型,主要包括车辆纵向、横向、横摆以及四个车轮的转动等7个自由度。 使用Carsim和Simulink联合仿真验证7自由度动力学模型,carsim输出变量包括:前轮转角和质心侧偏角等参数对比,行驶工况采用的是双移线。 carsim和simulink模型也可以分开分别运行进行验证。 文件包括:simulink模型版本2018b和carsim2019版本cpar文件,以及参考文献,到手即能运行。
最近在研究分布式驱动电动汽车相关技术,今天就来跟大家唠唠这个有趣的七自由度动力学模型以及它的仿真验证过程。
七自由度动力学模型
分布式驱动电动汽车的七自由度动力学模型相当关键,它主要涵盖了车辆纵向、横向、横摆以及四个车轮的转动,共7个自由度。可以这么理解,这就像是给电动汽车建立了一个多维度的运动“画像”,纵向自由度对应车辆前进后退的方向,横向自由度反映车辆左右移动的情况,横摆自由度则关乎车辆整体绕垂直轴的转动,而四个车轮的转动自由度又细致刻画了每个车轮的独特运动状态。
以车轮转动自由度为例,在代码实现中,我们可以这样简单示意(假设使用Python语言):
# 定义车轮转动自由度相关参数
wheel_radius = 0.3 # 车轮半径,单位:米
wheel_angular_velocity = 10 # 车轮角速度,单位:弧度/秒
linear_velocity = wheel_radius * wheel_angular_velocity # 通过半径和角速度计算线速度
print(f"车轮线速度为: {linear_velocity} m/s")这段代码展示了如何根据车轮半径和角速度计算线速度,在实际的动力学模型实现中,会涉及更复杂的物理公式和相互关联的参数计算,但这能帮助我们初步理解车轮转动自由度与车辆整体运动参数的联系。
Carsim与Simulink联合仿真验证
接下来聊聊如何验证这个七自由度动力学模型。这里用到了Carsim和Simulink联合仿真的方法,相当巧妙。
联合仿真设置与参数输出
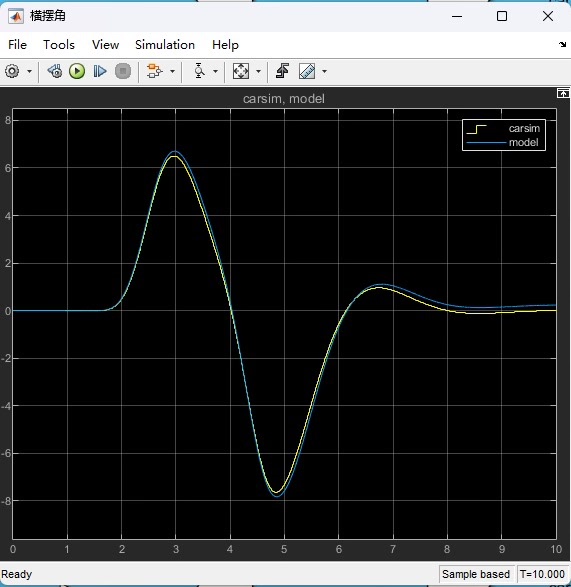
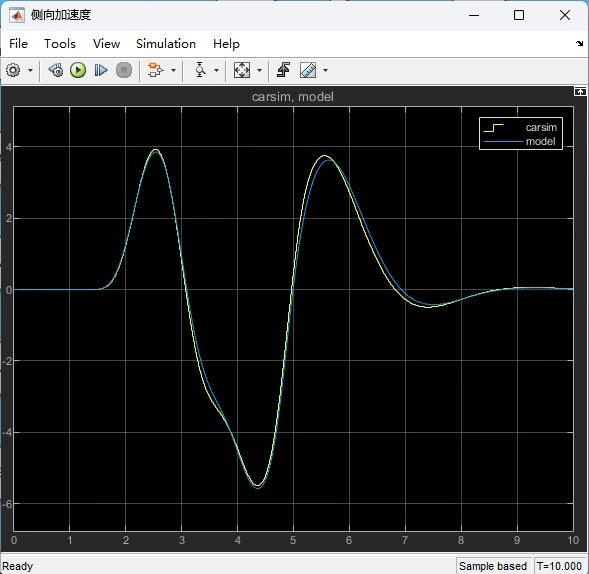
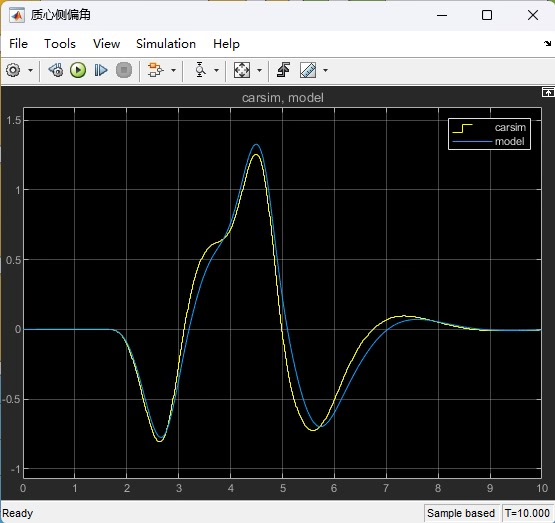
在联合仿真中,Carsim输出变量包含前轮转角和质心侧偏角等关键参数对比。行驶工况采用双移线,这是一种模拟车辆在实际驾驶中频繁变道等复杂情况的工况设置。通过这样的工况和输出参数,我们能全面考察七自由度动力学模型在不同驾驶场景下的表现。
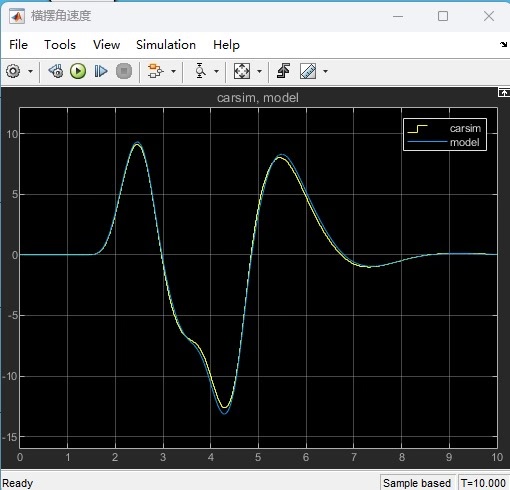
分布式驱动电动汽车七自由度动力学模型,主要包括车辆纵向、横向、横摆以及四个车轮的转动等7个自由度。 使用Carsim和Simulink联合仿真验证7自由度动力学模型,carsim输出变量包括:前轮转角和质心侧偏角等参数对比,行驶工况采用的是双移线。 carsim和simulink模型也可以分开分别运行进行验证。 文件包括:simulink模型版本2018b和carsim2019版本cpar文件,以及参考文献,到手即能运行。
在Simulink中搭建与Carsim交互的模型时,要注意数据的传递与接收。假设我们在Simulink中搭建一个简单的接收Carsim输出前轮转角的模块:
- 首先创建一个输入端口,用于接收来自Carsim的数据。
- 可以使用一个简单的Scope模块来实时显示前轮转角数据变化。就像这样,在Simulink界面中拖入相应模块并连接好,就完成了简单的数据可视化。
分开运行验证
有意思的是,Carsim和Simulink模型也能分开分别运行进行验证。这种方式有它独特的好处,比如在单独调试Carsim模型时,我们可以更专注于车辆本身动力学参数的调整和优化,而不用担心Simulink方面可能带来的干扰。同样,单独运行Simulink模型,可以更细致地检查我们搭建的控制策略或者信号处理模块是否正常工作。
可用文件
如果大家也想尝试研究这个模型,相关文件都很齐全,包括simulink模型版本2018b和carsim2019版本cpar文件,还有参考文献。真正做到了到手即能运行,非常方便。
希望通过我的分享,大家对分布式驱动电动汽车七自由度动力学模型以及它的仿真验证有了更清晰的认识,感兴趣的朋友可以深入研究,一起交流更多的细节。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 7
7 0
0- 0



 已为社区贡献21条内容
已为社区贡献21条内容

所有评论(0)