基于MATLAB搭建飞轮储能充放电模型的探索
基于MATLAB搭建的飞轮储能充放电模型,控制模式三种,首先飞轮转速提高充电,然后预并网,最后转速达到10000,开始放电。 总共搭建了无源控制和正负序分离PI策略两。
在能源存储与管理领域,飞轮储能系统凭借其高效、快速响应等优势,受到了越来越多的关注。今天就来聊聊基于MATLAB搭建的飞轮储能充放电模型,这里面包含了一些有趣的控制模式和策略。
控制模式解析
- 充电阶段:提高飞轮转速
在飞轮储能系统中,充电过程通过提高飞轮的转速来实现能量的存储。简单的代码示例(MATLAB伪代码)如下:
% 初始化参数
initial_speed = 0; % 初始转速
target_speed = 10000; % 目标转速
speed_increase_rate = 100; % 转速增加速率
while initial_speed < target_speed
initial_speed = initial_speed + speed_increase_rate;
% 这里可以添加一些与实际物理系统相关的约束和计算,例如考虑电机功率限制等
if initial_speed > target_speed
initial_speed = target_speed;
end
end这段代码模拟了飞轮转速从初始值逐渐增加到目标值的过程。在实际应用中,这个过程需要精确控制,因为过快的转速提升可能对飞轮的机械结构造成损害。
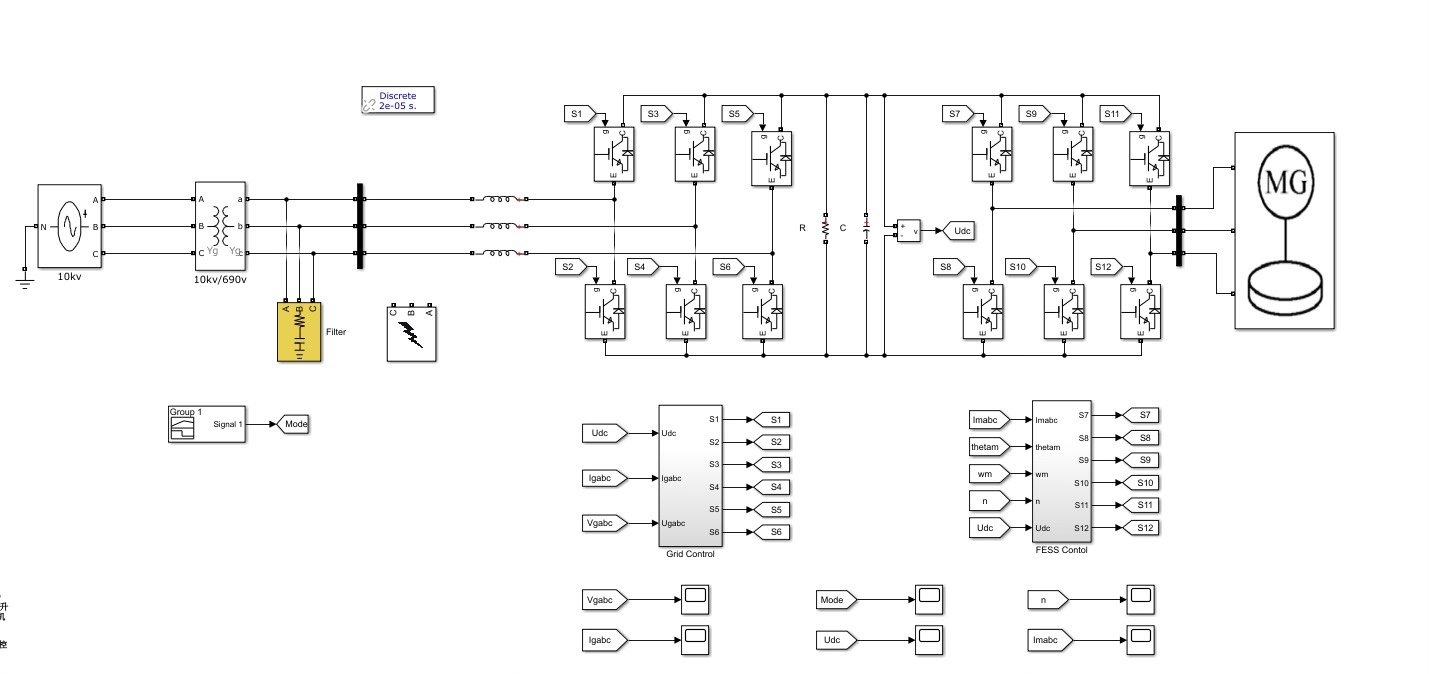
- 预并网阶段
预并网阶段是连接储能系统与电网的重要过渡步骤。它确保在正式并网前,飞轮储能系统的输出电能质量满足电网要求,例如电压幅值、频率和相位等参数与电网匹配。虽然这里没有直接给出代码,但在MATLAB中,可以通过电力系统仿真工具箱(如SimPowerSystems)来搭建相关模型。通过设置不同的模块参数,模拟和调整储能系统输出的电气特性,以实现与电网的良好衔接。
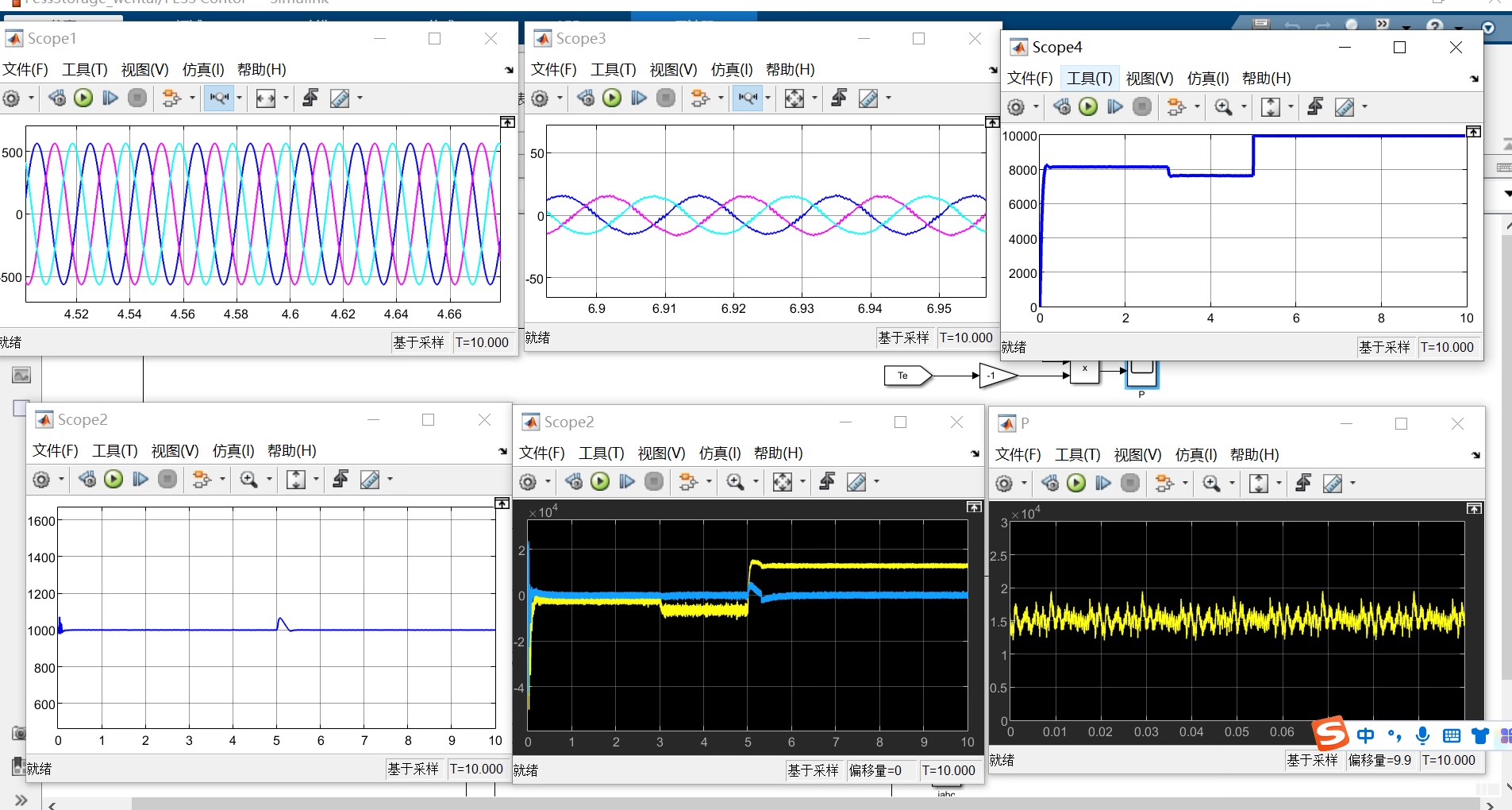
- 放电阶段:转速达到10000开始放电
当飞轮转速达到10000时,就开启放电模式。放电过程其实就是飞轮转速降低,将存储的动能转化为电能输出的过程。代码如下:
% 放电阶段
current_speed = 10000;
discharge_rate = -100; % 转速降低速率,代表放电
while current_speed > 0
current_speed = current_speed + discharge_rate;
% 根据转速计算输出电能,这里简单假设电能与转速平方成正比
power_output = current_speed^2;
% 输出电能相关操作,例如连接到电网模块
if current_speed < 0
current_speed = 0;
end
end这段代码展示了随着飞轮转速降低,如何计算并输出相应电能。实际情况中,还需要考虑电网负载特性、电能转换效率等更多因素。
控制策略:无源控制和正负序分离PI策略
- 无源控制
无源控制是一种基于系统能量成型的控制方法,它将飞轮储能系统视为一个无源系统进行控制。这种方法的优点在于能够使系统在平衡点处保持稳定,并且不需要精确的系统模型参数。在MATLAB中实现无源控制,关键在于构建能量函数,并基于此设计控制律。例如,通过定义系统的哈密顿函数,然后根据能量平衡原理,推导得出控制律的表达式。虽然具体代码实现较为复杂,但基本思路是通过调整控制输入,使得系统的能量按照期望的方式变化,从而实现对飞轮储能系统的稳定控制。
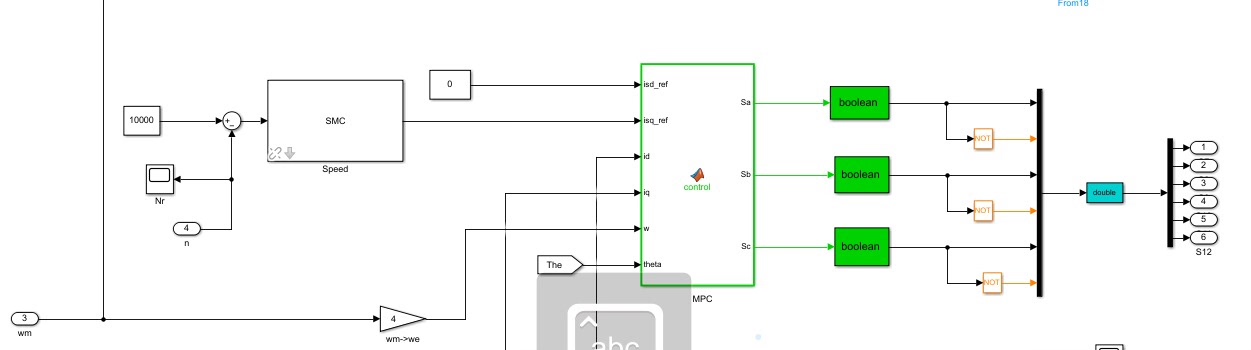
- 正负序分离PI策略
正负序分离PI策略主要用于处理电网电压不平衡的情况。在实际电网运行中,电压不平衡现象较为常见,这会影响飞轮储能系统的性能和稳定性。通过正负序分离算法,将电网电压分解为正序和负序分量,然后分别采用PI控制器进行调节。MATLAB代码示例:
% 假设已经获取到电网电压信号voltage_signal
[positive_seq, negative_seq] = sequence_separation(voltage_signal); % 自定义正负序分离函数
kp_p = 0.5; ki_p = 0.1; % 正序PI控制器参数
kp_n = 0.5; ki_n = 0.1; % 负序PI控制器参数
% 正序PI控制
error_p = reference_value - positive_seq;
integral_p = integral_p + error_p * dt;
control_signal_p = kp_p * error_p + ki_p * integral_p;
% 负序PI控制
error_n = reference_value - negative_seq;
integral_n = integral_n + error_n * dt;
control_signal_n = kp_n * error_n + ki_n * integral_n;
% 合并控制信号
total_control_signal = control_signal_p + control_signal_n;这段代码简单展示了正负序分离PI策略的实现过程。通过分别对正序和负序分量进行PI控制,然后合并控制信号,使得飞轮储能系统能够在电网电压不平衡的情况下,依然保持稳定运行和高效的充放电性能。
基于MATLAB搭建的飞轮储能充放电模型,控制模式三种,首先飞轮转速提高充电,然后预并网,最后转速达到10000,开始放电。 总共搭建了无源控制和正负序分离PI策略两。
通过以上基于MATLAB搭建的飞轮储能充放电模型以及控制模式和策略的实现,我们能够更好地理解和优化飞轮储能系统在不同工况下的运行特性,为其在实际工程中的应用提供有力支持。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐


 7
7 0
0- 0



 已为社区贡献11条内容
已为社区贡献11条内容

所有评论(0)