探索NMPC:从原理到多场景代码实现的奇妙之旅
NMPC非线性模型预测控制从原理与代码实现 NMPC非线性模型预测控制详细原理推导 平行泊车轨迹规划 倒立摆Swing up控制 车辆运动学模型轨迹跟踪 四旋翼无人机轨迹跟踪 包含上述所有的文档和代码。
嘿,各位技术小伙伴们!今天咱们一头扎进NMPC(非线性模型预测控制)的神秘世界,看看它的原理到底是啥,又怎么在各种酷炫的场景里通过代码实现。
NMPC详细原理推导
NMPC的核心思想就是基于系统的非线性模型,预测系统未来的行为,然后通过求解一个优化问题来确定当前时刻的最优控制输入。想象一下,你开着车,不仅要考虑当下怎么操作方向盘、油门刹车,还要预测接下来几百米车子的行驶轨迹,然后做出最合理的操作。
从数学角度看,我们首先得有个描述系统动态的非线性模型,比如常见的离散时间模型可以写成:$x{k + 1} = f(xk, uk)$,这里$xk$是系统状态,$uk$是控制输入。然后呢,我们要定义一个性能指标,一般是最小化预测轨迹和期望轨迹之间的偏差,再加上控制输入的变化量等项,比如:$J = \sum{k = 0}^{N - 1} [l(xk, uk) + \rho \Delta uk^2] + F(xN)$,其中$l(xk, uk)$衡量状态和控制输入的代价,$\rho$是权重系数,$F(x_N)$是终端状态的代价。
NMPC非线性模型预测控制从原理与代码实现 NMPC非线性模型预测控制详细原理推导 平行泊车轨迹规划 倒立摆Swing up控制 车辆运动学模型轨迹跟踪 四旋翼无人机轨迹跟踪 包含上述所有的文档和代码。
接下来就是求解这个优化问题啦,一般通过数值优化算法,像序列二次规划(SQP)等。这个过程其实就是在每个时间步,不断调整控制输入,让系统尽可能地沿着期望轨迹走。
平行泊车轨迹规划
平行泊车可是个技术活,NMPC能帮我们优雅地实现。先看代码(以Python为例,这里简化代码仅展示核心思路):
import numpy as np
# 定义车辆运动学模型参数
L = 2.5 # 车辆轴距
dt = 0.1 # 时间间隔
def vehicle_model(x, u):
theta = x[2]
new_x = x[0] + u[0] * np.cos(theta) * dt
new_y = x[1] + u[0] * np.sin(theta) * dt
new_theta = theta + u[1] * dt
return np.array([new_x, new_y, new_theta])
# 假设期望的泊车终点位置
goal = np.array([5, 2, np.pi / 2])
# 初始状态
x0 = np.array([0, 0, 0])
# 这里简单设定预测时域N
N = 20
# 迭代求解控制输入
for i in range(N):
# 这里应该有具体的优化求解过程,为简化省略
u_opt = np.array([1, 0.1]) # 假设优化得到的控制输入
x0 = vehicle_model(x0, u_opt)
print(f"当前位置: {x0}")代码分析:这里我们先定义了车辆运动学模型vehiclemodel,它根据当前状态x和控制输入u来更新车辆位置。在实际应用中,我们要在每个时间步通过优化算法找到uopt,让车辆逐步驶向目标位置goal。这个优化过程就用到前面说的NMPC原理,最小化车辆当前位置和目标位置的偏差等代价函数。
倒立摆Swing up控制
倒立摆可是控制领域的经典案例,用NMPC来控制它摇摆上升超有趣。
import sympy as sp
# 定义符号变量
t = sp.Symbol('t')
theta = sp.Function('theta')(t)
omega = sp.Derivative(theta, t)
g = 9.81
l = 1
m = 0.1
# 建立倒立摆动力学方程
eq = m * l**2 * sp.Derivative(omega, t) + m * g * l * sp.sin(theta)
# 离散化处理(简化示意)
# 这里可以通过Euler法等进行离散化
# 假设已经离散化得到离散模型
def inverted_pendulum_discrete(x, u):
new_theta = x[0] + x[1] * dt
new_omega = x[1] + (-m * g * l * np.sin(x[0]) + u) / (m * l**2) * dt
return np.array([new_theta, new_omega])
# 初始状态
x_init = np.array([0, 0])
# 控制目标:让摆直立,即theta接近pi
goal_theta = np.pi
# 预测时域
N = 30
for i in range(N):
# 同样省略具体优化求解
u_opt = 1 # 假设优化得到的控制输入
x_init = inverted_pendulum_discrete(x_init, u_opt)
print(f"当前theta: {x_init[0]}")代码分析:首先用符号运算库sympy建立倒立摆的动力学方程,然后进行离散化得到离散模型invertedpendulumdiscrete。在循环里,每次通过优化找到合适的控制输入u_opt,让倒立摆从初始状态摇摆上升到直立状态,这个过程也是基于NMPC最小化摆的角度和目标角度偏差等代价函数。
车辆运动学模型轨迹跟踪
车辆在行驶过程中要精准跟踪预设轨迹,NMPC大显身手。
import matplotlib.pyplot as plt
# 定义车辆运动学模型
def kinematic_model(x, u):
v = u[0]
delta = u[1]
Lf = 2.0
new_x = x[0] + v * np.cos(x[2]) * dt
new_y = x[1] + v * np.sin(x[2]) * dt
new_theta = x[2] + v / Lf * np.tan(delta) * dt
return np.array([new_x, new_y, new_theta])
# 期望轨迹,简单假设为直线
def desired_trajectory(t):
return np.array([t, 0, 0])
# 初始状态
x_start = np.array([0, 0, 0])
T = 10
time = np.arange(0, T, dt)
x_track = np.zeros((len(time), 3))
x_track[0] = x_start
for i in range(len(time) - 1):
# 这里应该调用优化算法找u_opt
u_opt = np.array([1, 0]) # 假设优化得到的控制输入
x_track[i + 1] = kinematic_model(x_track[i], u_opt)
desired = desired_trajectory(time[i])
# 计算偏差等,可用于优化
error = np.linalg.norm(x_track[i + 1][:2] - desired[:2])
plt.plot(x_track[:, 0], x_track[:, 1], label='跟踪轨迹')
plt.plot([desired_trajectory(t)[0] for t in time], [desired_trajectory(t)[1] for t in time], label='期望轨迹')
plt.legend()
plt.show()代码分析:kinematicmodel定义了车辆运动学模型,根据控制输入更新车辆状态。desiredtrajectory设定了期望轨迹,这里简单设为直线。在循环中,每次通过优化得到u_opt来跟踪期望轨迹,最后通过绘图展示跟踪效果。
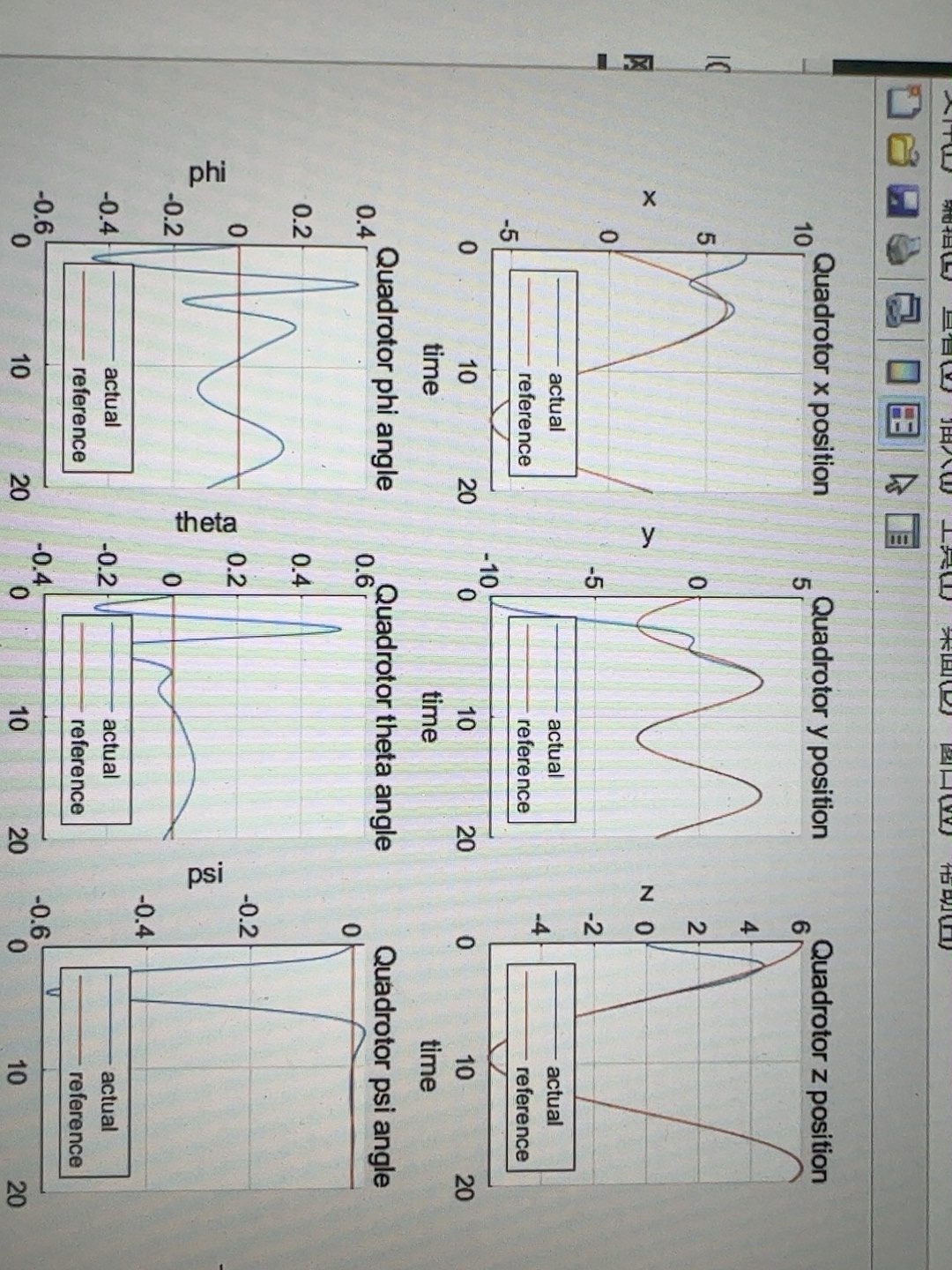
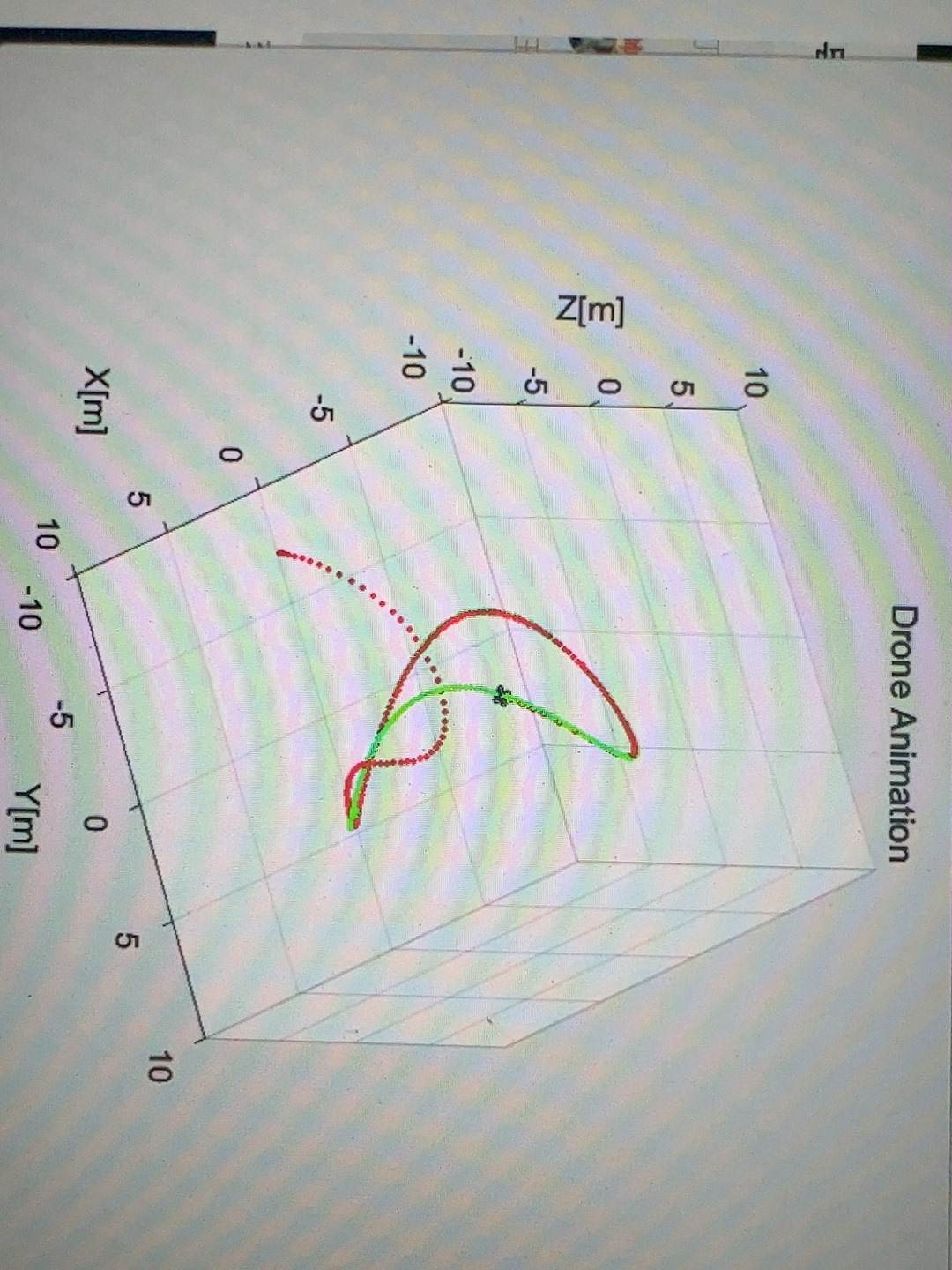
四旋翼无人机轨迹跟踪
四旋翼无人机在空中灵活飞舞,NMPC让它能精准跟踪轨迹。
import numpy as np
import matplotlib.pyplot as plt
# 四旋翼动力学模型简化(仅展示核心部分)
def quadcopter_dynamics(x, u):
# x: [x, y, z, vx, vy, vz, phi, theta, psi, p, q, r]
# u: [T1, T2, T3, T4]
g = 9.81
m = 0.5
new_x = x[0] + x[3] * dt
new_y = x[1] + x[4] * dt
new_z = x[2] + x[5] * dt
new_vx = x[3] + (u[0] * np.cos(x[6]) * np.sin(x[7]) * np.cos(x[8]) + u[1] * np.cos(x[6]) * np.sin(x[7]) * np.cos(x[8]) + u[2] * np.cos(x[6]) * np.sin(x[7]) * np.cos(x[8]) + u[3] * np.cos(x[6]) * np.sin(x[7]) * np.cos(x[8])) / m * dt
new_vy = x[4] + (u[0] * np.cos(x[6]) * np.cos(x[7]) * np.sin(x[8]) + u[1] * np.cos(x[6]) * np.cos(x[7]) * np.sin(x[8]) + u[2] * np.cos(x[6]) * np.cos(x[7]) * np.sin(x[8]) + u[3] * np.cos(x[6]) * np.cos(x[7]) * np.sin(x[8])) / m * dt
new_vz = x[5] + (-g + (u[0] + u[1] + u[2] + u[3]) / m) * dt
# 姿态角和角速度更新省略部分复杂计算
return np.array([new_x, new_y, new_z, new_vx, new_vy, new_vz])
# 期望轨迹,例如螺旋线
def desired_spiral(t):
R = 1
h = 0.5
x = R * np.cos(t)
y = R * np.sin(t)
z = h * t
return np.array([x, y, z])
x0 = np.array([0, 0, 0, 0, 0, 0])
T = 10
dt = 0.1
time = np.arange(0, T, dt)
x_traj = np.zeros((len(time), 6))
x_traj[0] = x0
for i in range(len(time) - 1):
# 省略优化求解u_opt过程
u_opt = np.array([1, 1, 1, 1]) # 假设优化得到的控制输入
x_traj[i + 1] = quadcopter_dynamics(x_traj[i], u_opt)
desired = desired_spiral(time[i])
error = np.linalg.norm(x_traj[i + 1][:3] - desired)
plt.plot(x_traj[:, 0], x_traj[:, 1], label='实际轨迹')
plt.plot([desired_spiral(t)[0] for t in time], [desired_spiral(t)[1] for t in time], label='期望轨迹')
plt.legend()
plt.show()代码分析:quadcopterdynamics构建了四旋翼无人机的动力学模型,根据控制输入u更新无人机状态。desiredspiral设定了期望的螺旋线轨迹。循环中通过优化得到u_opt来让无人机跟踪期望轨迹,绘图展示跟踪情况。
以上就是NMPC在不同场景下从原理到代码实现的精彩内容啦,大家可以进一步深入研究,在实际项目中发挥NMPC的强大威力!完整的文档和代码都在相应的项目里,大家可以自行探索调试,感受NMPC的魅力。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 2
2 0
0- 0



 已为社区贡献13条内容
已为社区贡献13条内容

所有评论(0)