永磁同步电机矢量控制的四种控制策略:PI控制、滞环控制、滑模控制与PR控制策略解析
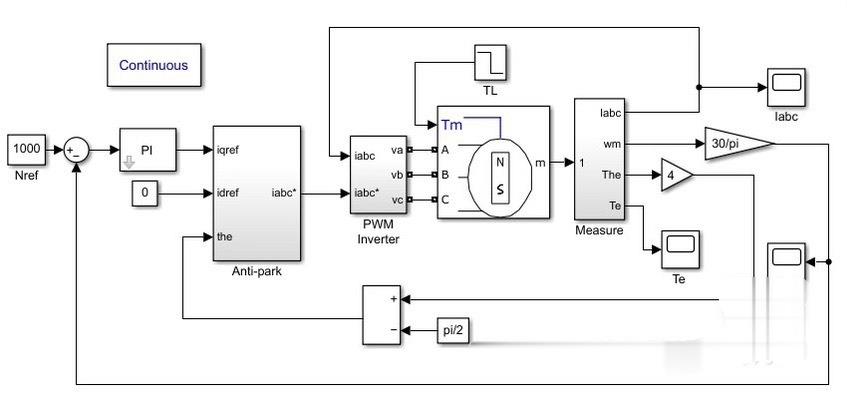
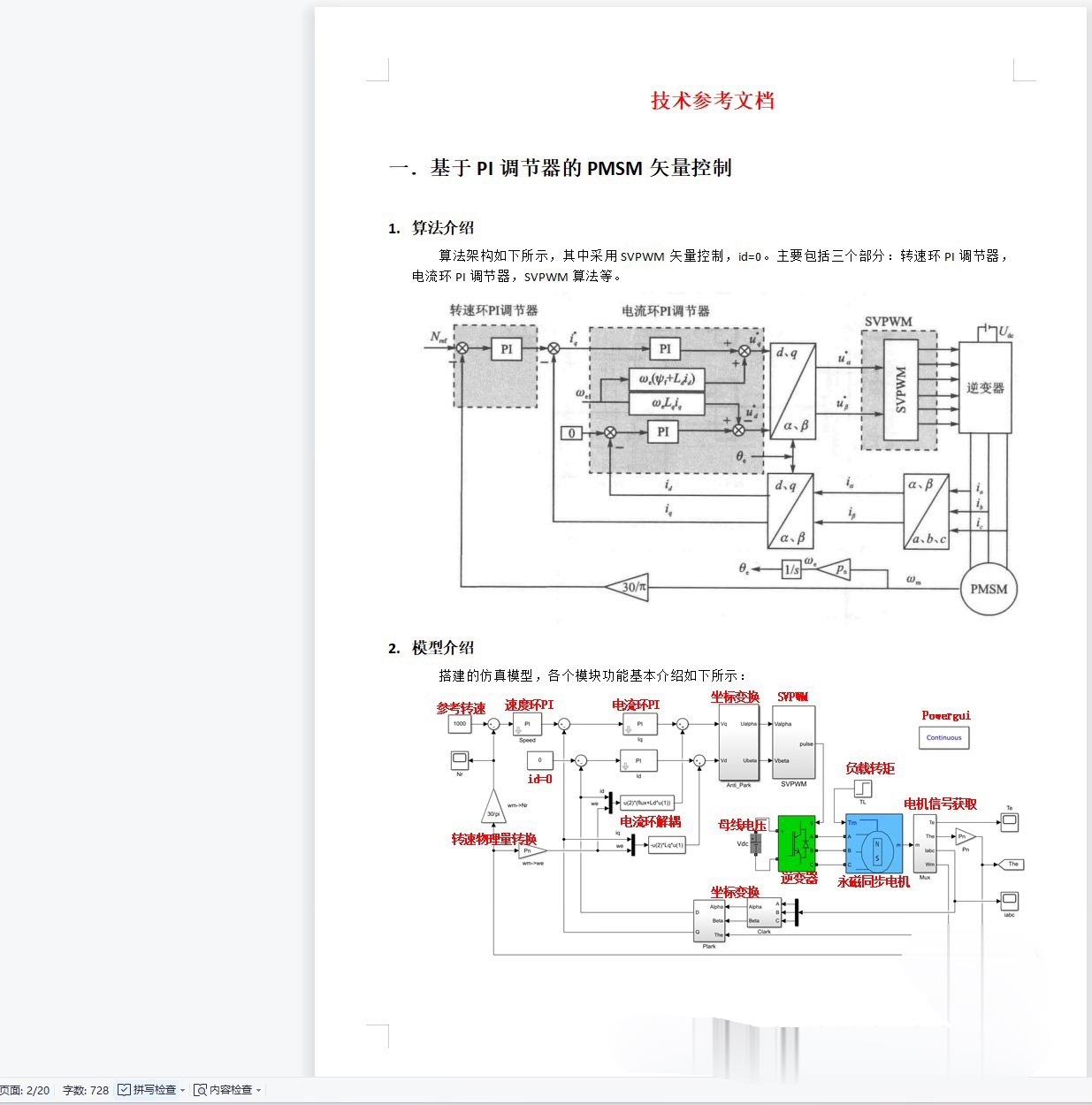
永磁同步电机矢量控制四个Simulink模型:pi控制、滞环控制、滑模控制、PR控制。 这四个模型都是有关PMSM矢量控制(FOC)的: (1)一般矢量控制转速环、电流环都采用PI调节器,则对应PMSM_FOC_PI文件; (2)在(1)基础上若把电流环PI控制换成滞环控制,则对应PMSM_Zhihuan; (3)若把转速环PI控制器换成滑模控制,则对应PMSM_SMC; (4)若电流控制中不采用坐标变换,则相应电流环PI控制器换成PR控制器,则对应PMSM_PR。 一般PMSM矢量控制是指模型PMSM_FOC_PI仿真算法: (1)采用转速、电流双闭环控制; (2)转速环采用PI控制; (3)电流环采用PI控制; (4)调制方式SVPWM矢量控制; (5)跟踪性能良好,具有较好的动态性能和抗扰动能力; (6)各个模块功能分类明确,容易理解。 带20页的详细说明文档,对上述四个模型充分阐述原理及调试过程。 另附赠17篇搭建模型的参考文献。 波形已经调试完美了,可以直接运行。
永磁同步电机矢量控制这玩意儿玩起来真上瘾,尤其是当你把不同控制策略塞进Simulink模型时,就像给赛车换发动机一样刺激。今天咱们来拆解四个实战模型,手把手看看PI、滞环、滑模、PR这几种控制在FOC架构下怎么玩出花样。
先说基础款的PI双闭环,这个模型文件名PMSMFOCPI简直就是控制界的"标准答案"。转速外环和电流内环都用PI调节,SVPWM调制稳得一批。这里有个调试小技巧:调电流环时先把转速环切手动,盯着d轴电流响应,把Kp从0.1往上怼,直到电机启动时电流波形像爬楼梯而不是坐电梯。比如下面这段参数设定:
Ts = 1e-5; % 采样时间别省这个
Kp_id = 2.5; Ki_id = 1200; % d轴电流环
Kp_iq = 2.5; Ki_iq = 1200; % q轴电流环注意积分项别太猛,上次我Ki设到5000,结果电机直接表演"电流过山车",保护电路都触发了。
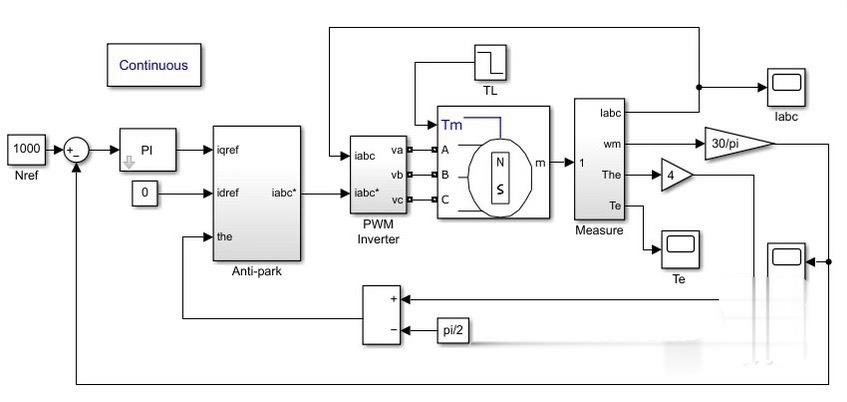
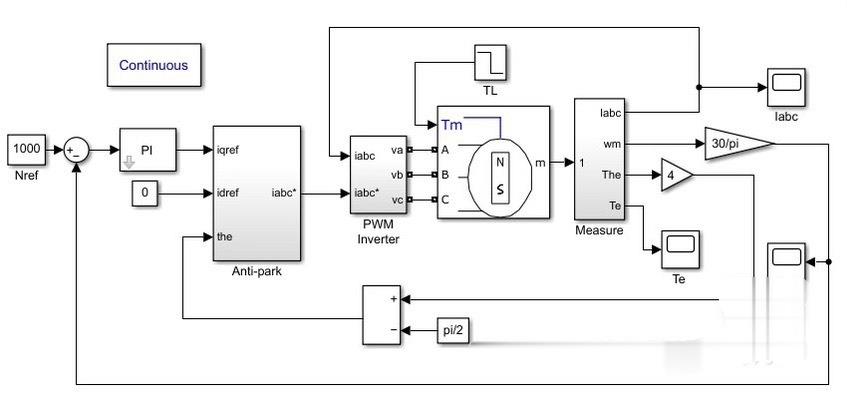
接着看滞环控制的PMSM_Zhihuan模型,这货把电流环PI换成滞环比较器,操作骚得很。在Simulink里拖个Relay模块,设置滞环宽度时得在开关频率和跟踪精度之间走钢丝。有个坑是滞环宽度得跟着母线电压动态调整,否则满载时电流纹波能当锯齿波用。代码里这个动态滞环实现挺有意思:
function hysteresis_width = calc_hysteresis(Vdc, L)
% 根据母线电压和电感计算滞环带
hysteresis_width = Vdc/(3*L)*Ts*0.8; % 留20%余量
end实测发现当电机转速突然飙升时,固定滞环带会导致逆变器开关频率突破天际,这个动态算法能救场。
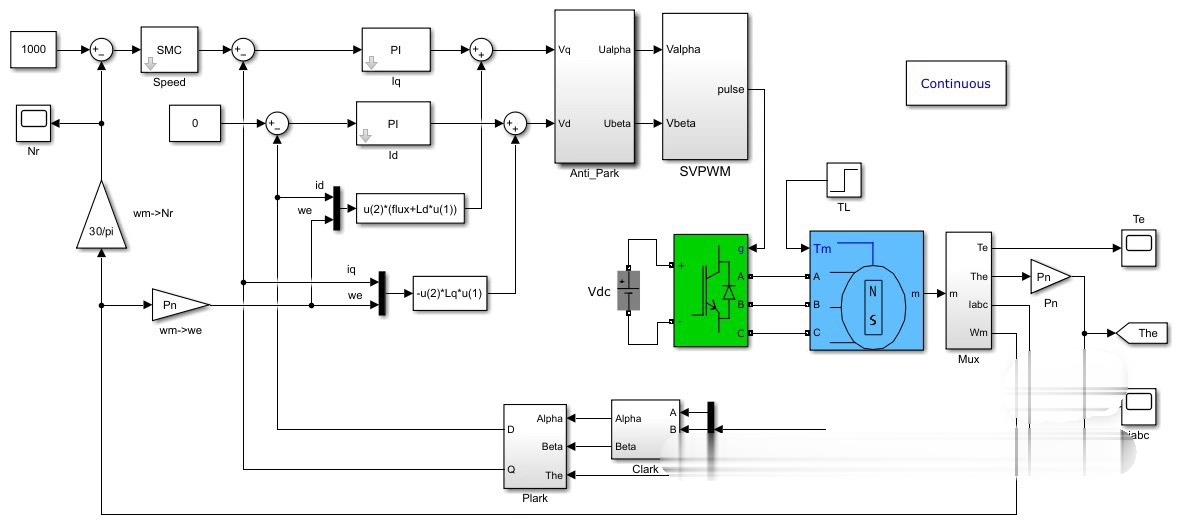
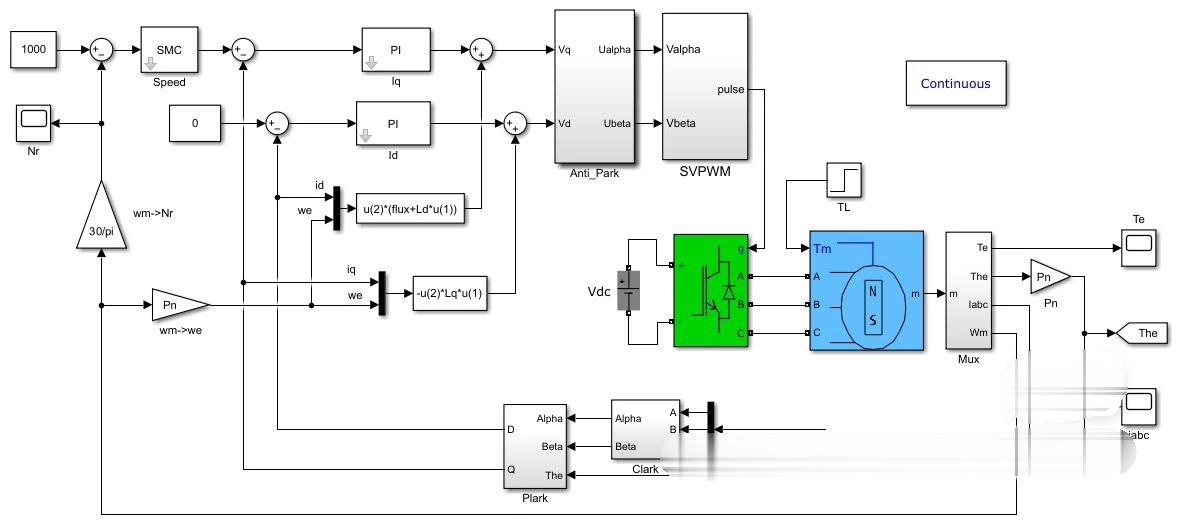
滑模控制的PMSM_SMC模型是硬核玩家的菜,转速环换成滑模控制器后鲁棒性直接拉满。设计滑模面时别照搬论文公式,实战中发现用转速误差加积分项比单纯误差导数更抗造。模型里的sign函数记得加饱和环节,要不然抖振能让你示波器变雪花屏。分享个调试时发现的骚操作:把切换增益从固定值改成负载转矩的函数,突然发现突加负载时转速稳如老狗。
永磁同步电机矢量控制四个Simulink模型:pi控制、滞环控制、滑模控制、PR控制。 这四个模型都是有关PMSM矢量控制(FOC)的: (1)一般矢量控制转速环、电流环都采用PI调节器,则对应PMSM_FOC_PI文件; (2)在(1)基础上若把电流环PI控制换成滞环控制,则对应PMSM_Zhihuan; (3)若把转速环PI控制器换成滑模控制,则对应PMSM_SMC; (4)若电流控制中不采用坐标变换,则相应电流环PI控制器换成PR控制器,则对应PMSM_PR。 一般PMSM矢量控制是指模型PMSM_FOC_PI仿真算法: (1)采用转速、电流双闭环控制; (2)转速环采用PI控制; (3)电流环采用PI控制; (4)调制方式SVPWM矢量控制; (5)跟踪性能良好,具有较好的动态性能和抗扰动能力; (6)各个模块功能分类明确,容易理解。 带20页的详细说明文档,对上述四个模型充分阐述原理及调试过程。 另附赠17篇搭建模型的参考文献。 波形已经调试完美了,可以直接运行。
PR控制的PMSM_PR模型玩的是频域魔法,不用坐标变换这点确实省事。但谐振控制器参数调试是个玄学,特别是谐振频率带宽设置。实测中电网频率波动±2Hz时,这样设置谐振器能hold住:
Kp = 3.2; Kr = 150;
omega_c = 2*pi*50; % 基频50Hz
带宽 = 5; % Hz带宽设太窄会响应迟钝,设太宽又容易捡到谐波噪声。有个邪门现象是当电机启动瞬间,PR控制会产生诡异的相位跳变,后来在谐振器前串了个斜坡发生器才镇住。
这四种模型在突卸负载测试时表现迥异:PI控制在20ms内恢复稳态,滞环控制在15ms但电流毛刺多,滑模控制基本看不出波动,PR控制在30ms但电流正弦度最优。实际选型时得看场景——电动车驱动首选滑模,精密机床可能用PR,家电产品还是PI最实惠。
模型文件里的SVPWM模块藏着个武功秘籍:过调制处理。当调制比超0.95时,用这个算法能榨干母线电压:
function [Ta, Tb, Tc] = over_modulation(Valpha, Vbeta)
theta = atan2(Vbeta, Valpha);
Vm = sqrt(Valpha^2 + Vbeta^2);
if Vm > Vdc/sqrt(3)
% 幅值限制
Valpha = Valpha * (Vdc/sqrt(3))/Vm;
Vbeta = Vbeta * (Vdc/sqrt(3))/Vm;
end
% 接着走正常SVPWM流程...
end这个处理让电机在高速区还能保持力矩,上次做电动车爬坡测试全靠这招。不过要注意长期过调制会让逆变器发热量飙升,散热片得加码。
最后说个血泪教训:所有模型里的Clark变换千万别手贱改坐标系,有次把60°改成90°,结果电机启动直接跳机械舞。现在每个模型开跑前必做三项检查:坐标变换方向、Park变换角度来源、电流采样符号。毕竟在矢量控制里,坐标系错位相当于把方向盘装在了后备箱。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐


 0
0 0
0- 0



 已为社区贡献20条内容
已为社区贡献20条内容

所有评论(0)