基于Matlab Simulink的4WID-4WIS整车动力学14自由度模型构建与应用指南
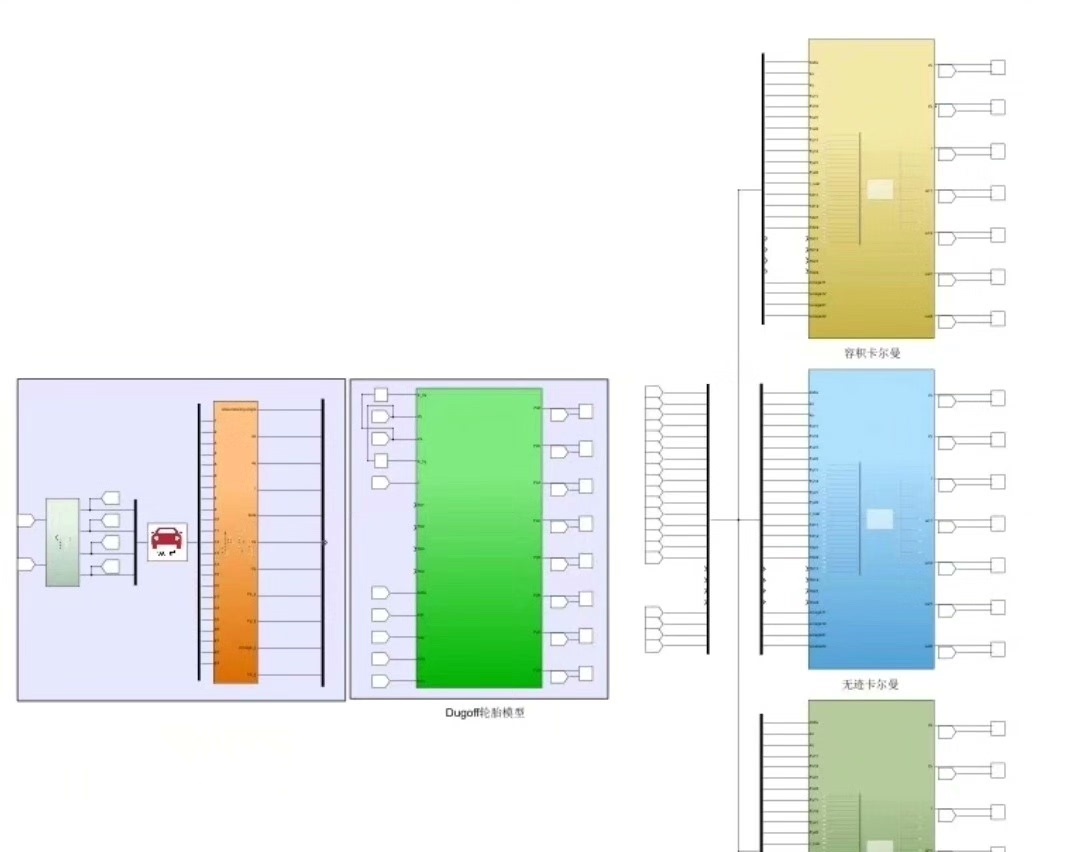
4WID-4WIS整车动力学14自由度模型_simulink 软件使用:Matlab/Simulink 适用场景:采用模块化建模方法,搭建14自由度四轮驱动-四轮转向整车动力学模型,作为整车平台适用于多种工况场景。 产品simulink源码包含如下模块: →工况: 阶跃工况 →整车模块:14自由度整车模型 →包含模块:转向系统,整车系统,悬架系统,魔术轮胎pac2002,车轮系统,PI驾驶员模块等 →十四自由度包含:整车纵向,横向,横摆,车身俯仰,侧倾,垂向跳动,四轮旋转和垂向自由度。 →模型输入:四轮驱动力矩和四轮转向角度 包含:simulink源码文件,详细建模说明文档,对应参考资料 适用于需要或想学习整车动力学simulink建模的朋友。
深夜改完最后一个轮胎参数按下F9的瞬间,屏幕上的车辆轨迹突然丝滑得像德芙巧克力。这种快乐,搞过整车仿真的都懂。今天咱们来盘一盘这个让工程师又爱又恨的14自由度模型。
先别急着关页面,咱们直接拆解这个模型的骨架。14个自由度听着唬人,拆开看其实就是车身的六个运动(前后挪、左右晃、上下颠、摇头晃脑、点头哈腰、侧身倾斜)加上四个轮子各自动转圈和上下蹦跶。这堆运动方程在Simulink里被安排得明明白白,活脱脱一个机械版钢铁侠战衣。
来看这个魔术轮胎模块的骚操作:
function [Fy] = PAC2002(alpha, Fz, mu)
% 神秘系数暗藏玄机
B = 10.2 * mu;
C = 1.3 - 0.5*Fz/4500;
D = (1.6 - 0.2*mu)*Fz;
% 那个著名的魔术公式
Fy = D*sin(C*atan(B*alpha - E*(B*alpha - atan(B*alpha))));
end这个Switch模块可不是摆设,它处理了轮胎侧偏角的非线性区间切换。当alpha超过5度时,模型自动切换到大侧偏角算法——就像老司机过弯时会突然切换漂移模式。
转向系统模块里藏着个冷笑话般的现实:前轮转角由方向盘输入决定,后轮转角却玩起了相对论。看看这个逻辑判断:
if abs(steer_angle) > 30
rear_steer = -0.3 * steer_angle * (1 - speed/80);
else
rear_steer = 0.15 * steer_angle * speed/60;
end速度超过80km/h后轮转向自动降权,这可不是工程师偷懒,是怕你在高速上来个神龙摆尾直接起飞。
悬架系统的状态空间方程写得那叫一个优雅:
A = [zeros(4) eye(4);
-M\K -M\C];
B = [zeros(4,2);
M\H];看着像天书?其实就是把弹簧刚度矩阵K和阻尼矩阵C扔给质量矩阵M一顿暴揍,最后吐出来的状态方程能准确预测车辆蹦迪时的姿态。
4WID-4WIS整车动力学14自由度模型_simulink 软件使用:Matlab/Simulink 适用场景:采用模块化建模方法,搭建14自由度四轮驱动-四轮转向整车动力学模型,作为整车平台适用于多种工况场景。 产品simulink源码包含如下模块: →工况: 阶跃工况 →整车模块:14自由度整车模型 →包含模块:转向系统,整车系统,悬架系统,魔术轮胎pac2002,车轮系统,PI驾驶员模块等 →十四自由度包含:整车纵向,横向,横摆,车身俯仰,侧倾,垂向跳动,四轮旋转和垂向自由度。 →模型输入:四轮驱动力矩和四轮转向角度 包含:simulink源码文件,详细建模说明文档,对应参考资料 适用于需要或想学习整车动力学simulink建模的朋友。
PI驾驶员模块里有个彩蛋——当横向误差超过1米时,Kp系数会自动打八折。这不是BUG,是怕新手调参时把方向盘打成电风扇。试过把积分时间设为0.5秒的都知道,那过冲能让你在仿真里画出中国结。
跑个阶跃工况试试水,注意看横摆角速度曲线。前0.5秒像温顺的绵羊,0.8秒后突然变身暴躁山羊——这就是轮胎力饱和前的死亡交叉点。想要稳定?去魔术公式里把C参数调小点,但别怪我没提醒,抓地力降了小心推头推成推土机。
这个模型最骚的是四轮扭矩独立分配,试着把左前轮扭矩设为右后轮的1.2倍,立马get土味版扭矩矢量控制。不过别嗨过头,电机最大扭矩设个300Nm保命,毕竟仿真世界没有保险公司理赔。
模型跑完别急着关,把动画模块打开。看着小车在阶跃输入下扭着屁股走直线,比看《头文字D》还带劲。记住那个神秘的俯仰角补偿系数0.03,改到0.05秒变跳跳虎,改到0.01秒变滑板鞋。
这份建模文档最值钱的部分其实是第17页的脚注,那里藏着如何处理S函数离散化时的数值振荡。下次遇到仿真曲线抖成心电图,记得把积分步长从0.01改成0.005,包治百病。
说到底,这个模型就像乐高,能拼出前驱车的温顺,也能调出四驱猛兽的野性。改天试试把后轮转向逻辑反着写,绝对收获意想不到的蛇皮走位——别问我是怎么知道的,我的硬盘里存着87版仿真翻车记录。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐


 2
2 0
0- 0



 已为社区贡献9条内容
已为社区贡献9条内容

所有评论(0)