基于MMC - HVDC直流输电系统的Simulink仿真探索
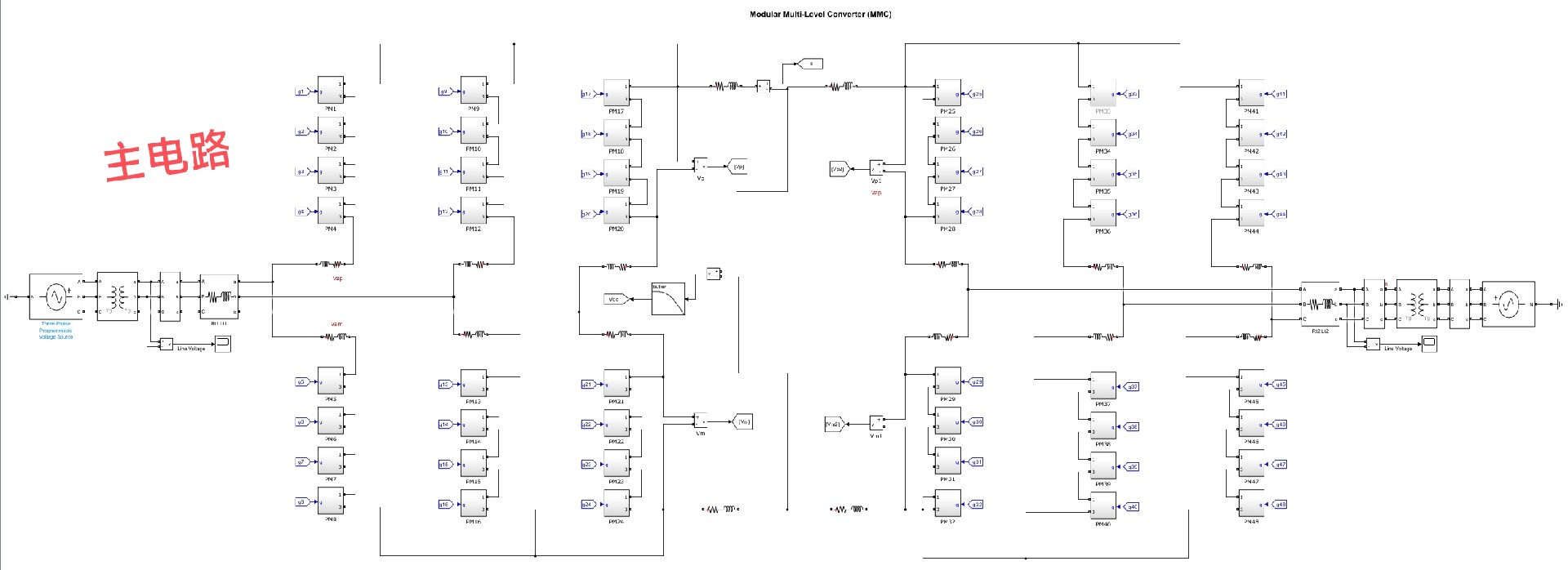
模块化多电平换流器,MMC-HVDC直流输电系统,单个桥臂4个子模块(5电平),采用载波移相调制 simulink仿真模型 直流电压4KV,功率等级5MW 换流站1:定直流母线电压控制+定无功功率控制; 换流站2:定有功功率控制+定无功功率控制 二倍频环流抑制控制+子模块电容电压均衡控制 (附参考文献和pi控制器参数计算,内容详实,适合初学者)
在电力传输领域,模块化多电平换流器(MMC) - 高压直流(HVDC)输电系统因其诸多优势而备受关注。今天咱就来深入探讨一个具体配置的MMC - HVDC系统的Simulink仿真模型,这对初学者理解这类系统非常有帮助。
系统基础配置
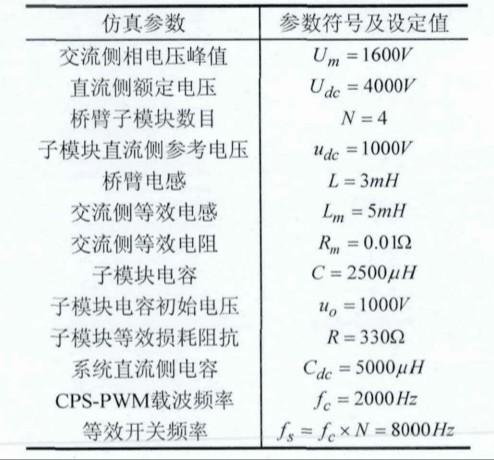
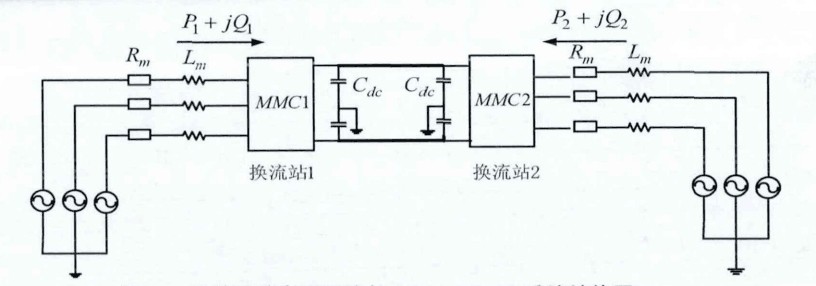
本次研究的MMC - HVDC直流输电系统,单个桥臂采用4个子模块,对应5电平结构。这种设计在实际应用中较为常见,它兼顾了成本与性能。采用载波移相调制方式,这能有效降低输出电压的谐波含量。
Simulink仿真搭建
关键参数设定
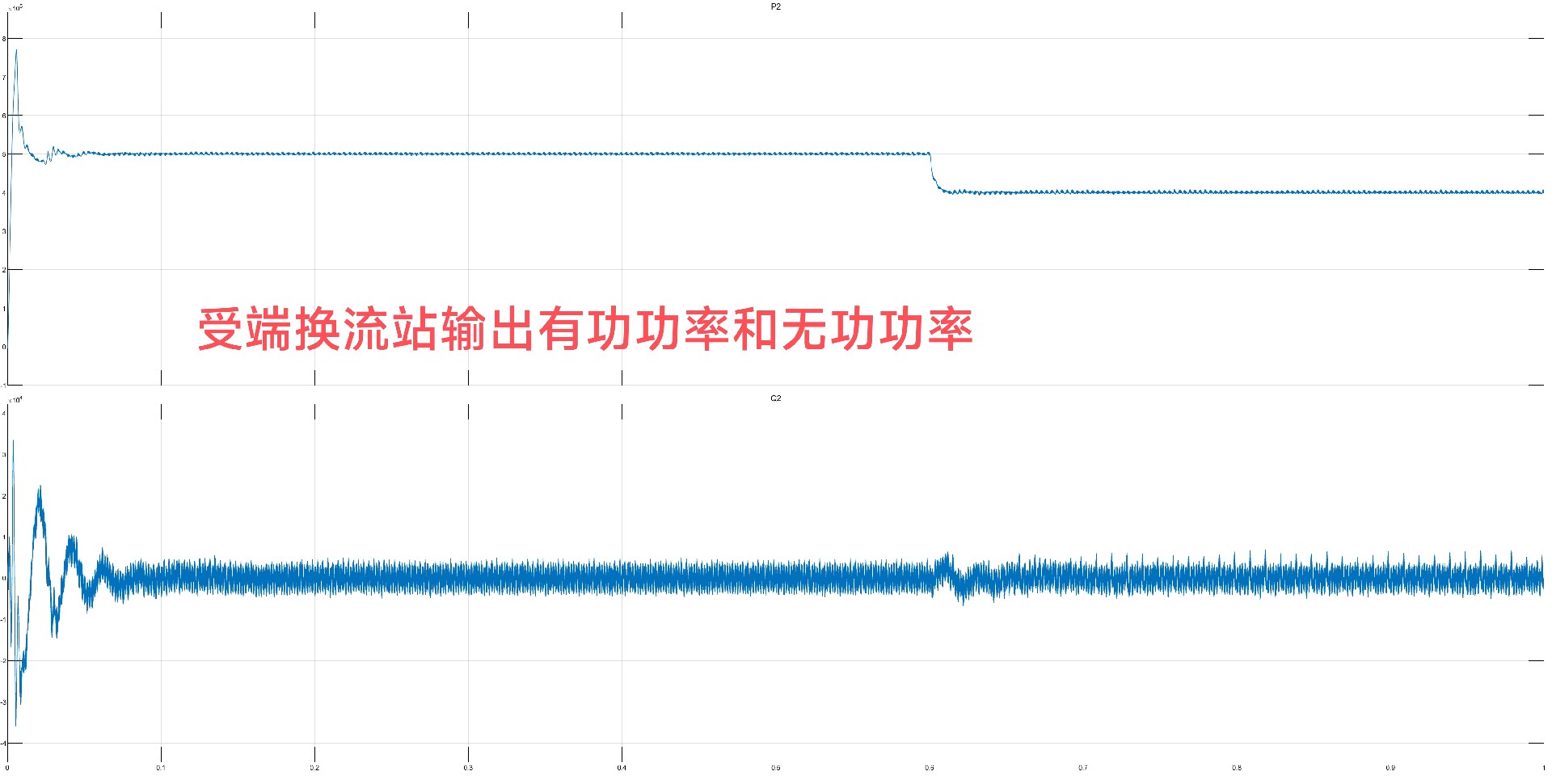
直流电压设置为4KV,功率等级为5MW。如此的参数设定与实际一些中规模的电力传输场景相契合,方便我们在实验室环境下模拟和研究。
换流站控制策略
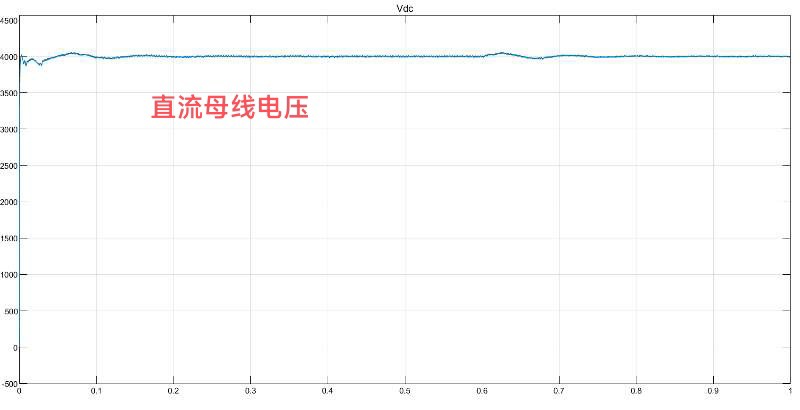
- 换流站1:采用定直流母线电压控制 + 定无功功率控制。定直流母线电压控制确保了直流侧电压的稳定,这对于整个输电系统的可靠运行至关重要。在Simulink中,我们可以通过如下简单的代码框架来理解其实现思路(以Matlab代码示意,实际Simulink用模块搭建逻辑类似):
% 假设测量得到的直流母线电压为measured_dc_voltage
% 设定的直流母线电压参考值为reference_dc_voltage
error_dc_voltage = reference_dc_voltage - measured_dc_voltage;
% 这里采用简单的比例控制,实际可能是PI或更复杂控制
control_signal = Kp_dc * error_dc_voltage; 这里 Kp_dc 是比例系数,它决定了控制器对电压误差的响应强度。定无功功率控制则维持换流站1与交流系统之间无功功率的稳定交换。
- 换流站2:采用定有功功率控制 + 定无功功率控制。定有功功率控制保障了功率按照预期从一端传输到另一端。同样以简单代码示例:
% 假设测量得到的有功功率为measured_active_power
% 设定的有功功率参考值为reference_active_power
error_active_power = reference_active_power - measured_active_power;
control_signal_active = Kp_active * error_active_power; 其中 Kp_active 是有功功率控制的比例系数。
特殊控制策略
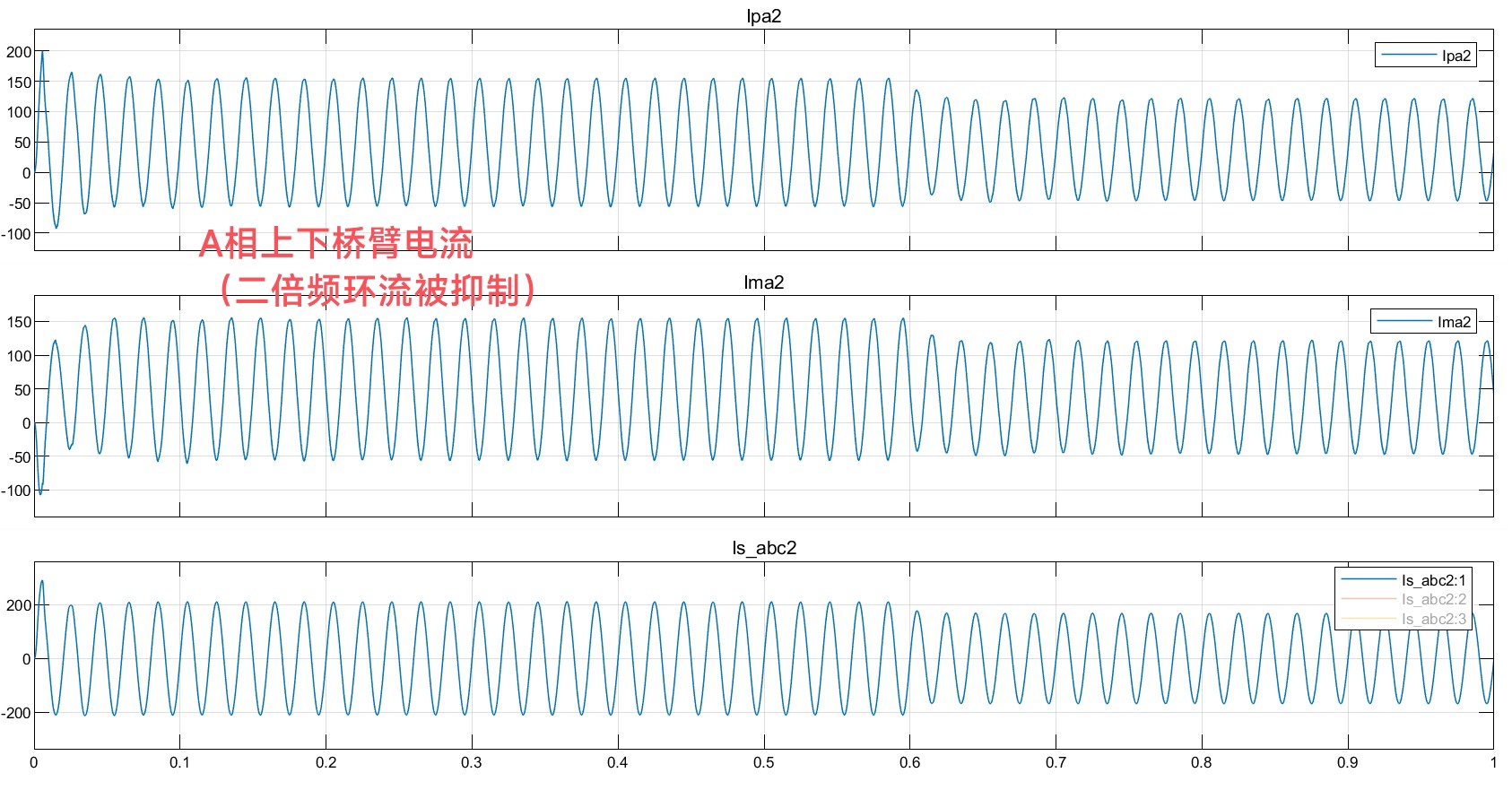
二倍频环流抑制控制
MMC系统中存在二倍频环流,它会增加系统损耗并影响系统性能。通过特定的控制算法来抑制它就尤为重要。比如采用基于零序电压注入的环流抑制方法。在Simulink中搭建相关模块实现此功能,其背后的核心思路类似于:检测桥臂电流中的二倍频分量,然后通过计算生成对应的零序电压注入量,以抵消环流。
% 假设检测到的桥臂电流为arm_current
% 通过傅里叶变换提取二倍频电流分量
[~,double_freq_current] = calculate_frequency_component(arm_current, 2*fundamental_freq);
% 根据二倍频电流分量计算零序电压注入量
zero_seq_voltage = K_circulation * double_freq_current; 这里 K_circulation 是用于调节零序电压注入强度的系数。
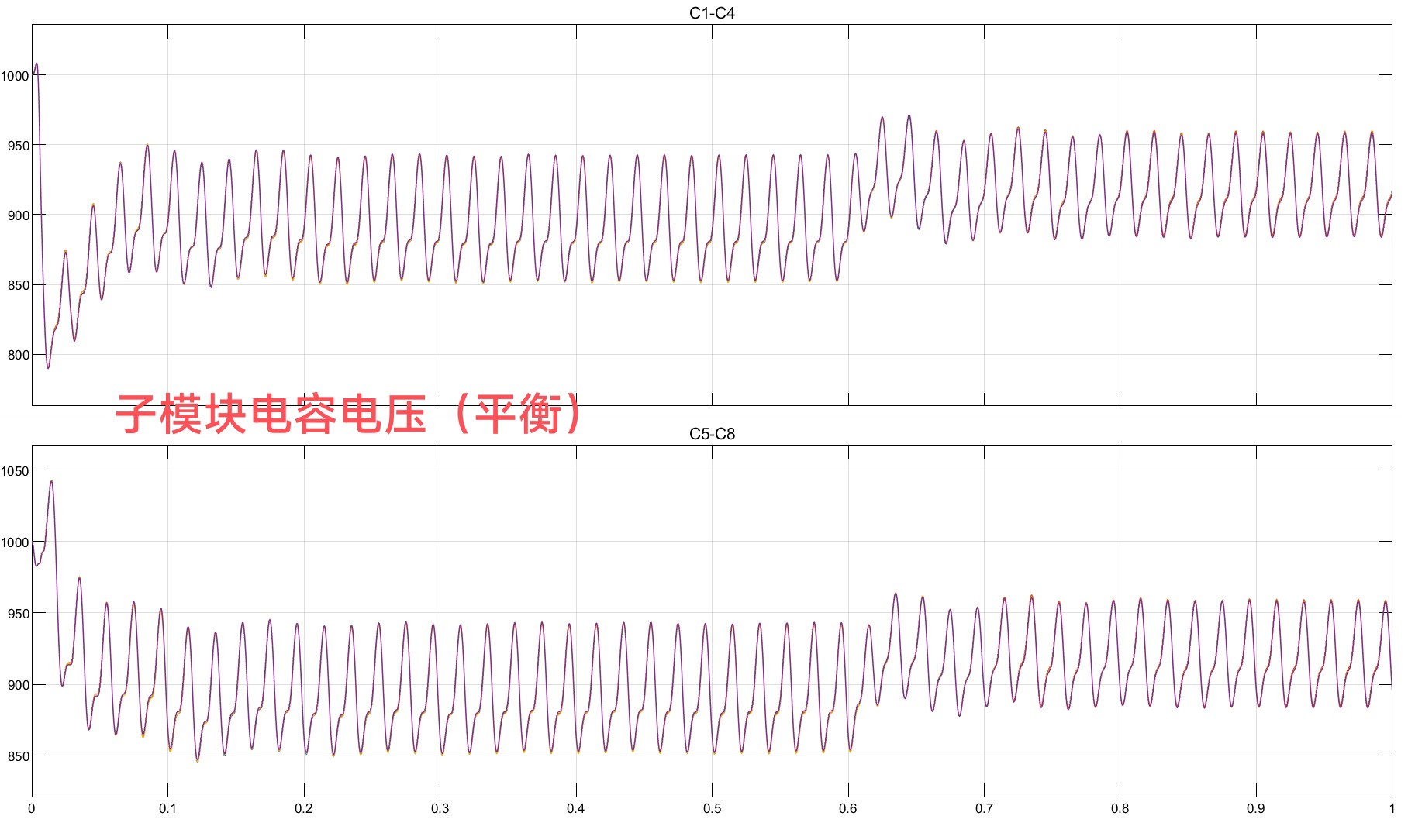
子模块电容电压均衡控制
每个子模块的电容电压均衡是保证MMC正常运行的关键。以最近电平逼近调制为例,在选择投入的子模块时,优先选择电容电压较低的子模块,以实现电容电压的均衡。代码逻辑示意如下:
% 假设所有子模块电容电压存储在数组capacitor_voltages中
[min_voltage_index, ~] = min(capacitor_voltages);
% 选择电容电压最小的子模块投入
selected_submodule = min_voltage_index; PI控制器参数计算
PI控制器在整个系统控制中起着核心作用。以直流母线电压控制的PI控制器为例,其参数计算通常基于系统的开环传递函数。首先,我们要确定系统的控制对象模型,然后根据期望的闭环响应特性,如带宽、超调量等,来计算比例系数 Kp 和积分系数 Ki。
假设系统的开环传递函数为 G(s),我们期望的闭环传递函数为 T(s)。通过一些经典控制理论方法,比如极点配置法,可以得到:
\[ Kp = \frac{\omegac}{|G(j\omegac)|} \]
模块化多电平换流器,MMC-HVDC直流输电系统,单个桥臂4个子模块(5电平),采用载波移相调制 simulink仿真模型 直流电压4KV,功率等级5MW 换流站1:定直流母线电压控制+定无功功率控制; 换流站2:定有功功率控制+定无功功率控制 二倍频环流抑制控制+子模块电容电压均衡控制 (附参考文献和pi控制器参数计算,内容详实,适合初学者)
\[ Ki = \omegac \cdot \text{Im}\left\{\frac{1}{G(j\omegac)}\right\} \]
这里 \(\omega_c\) 是期望的截止频率。
参考文献
[1] 《模块化多电平换流器高压直流输电技术》 - 详细介绍了MMC - HVDC的基础理论与实践。
[2] IEEE相关论文《Control Strategies for Modular Multilevel Converters in HVDC Systems》 - 对各类控制策略有深入分析。
希望通过这篇博文,初学者们能对MMC - HVDC直流输电系统的Simulink仿真有更清晰的认识,为进一步深入研究电力传输系统打下基础。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐



 1
1 0
0- 0



 已为社区贡献9条内容
已为社区贡献9条内容

所有评论(0)