探索PMSM永磁同步电机无传感器滑模观测器仿真模型
同步电机无传感SMO滑膜观测器模型+代码 PMSM永磁同步电机无传感器滑模观测器仿真模型(基于28035),典型的smo方案; 代码为实际应用SOP代码,非一般玩票代码可比(非ti例程);解析说明详细描述了参数实现过程和实现机理,工程实践和理论基础结合。
在电机控制领域,永磁同步电机(PMSM)因其高效、节能等优点被广泛应用。而无传感器控制技术则进一步提升了PMSM的应用灵活性与可靠性,其中滑模观测器(SMO)是一种备受青睐的方案。今天咱就唠唠基于28035的PMSM永磁同步电机无传感器滑模观测器仿真模型,顺便看看那些实打实的应用代码。
滑模观测器(SMO)基本原理
滑模控制是一种特殊的非线性控制,其控制律使系统状态在相平面上沿着预定的“滑动模态”轨迹运动。对于PMSM的无传感器控制,SMO通过对电机反电动势的观测来估算转子位置和速度。
假设PMSM在两相静止坐标系下的电压方程为:
\[
\begin{cases}
u{\alpha}=Rsi{\alpha}+Ls\frac{di{\alpha}}{dt}+e{\alpha}\\
u{\beta}=Rsi{\beta}+Ls\frac{di{\beta}}{dt}+e{\beta}
同步电机无传感SMO滑膜观测器模型+代码 PMSM永磁同步电机无传感器滑模观测器仿真模型(基于28035),典型的smo方案; 代码为实际应用SOP代码,非一般玩票代码可比(非ti例程);解析说明详细描述了参数实现过程和实现机理,工程实践和理论基础结合。
\end{cases}
\]
其中\(u{\alpha}, u{\beta}\)是定子电压,\(i{\alpha}, i{\beta}\)是定子电流,\(Rs\)是定子电阻,\(Ls\)是定子电感,\(e{\alpha}, e{\beta}\)是反电动势。
滑模观测器就是通过对电流的实时测量,构建观测器来逼近反电动势。当观测器达到滑模状态时,观测的反电动势就能用来估算转子位置和速度。
基于28035的仿真模型搭建
德州仪器(TI)的28035芯片以其强大的数字信号处理能力,为PMSM的无传感器控制提供了有力的硬件支持。在搭建仿真模型时,我们要充分利用28035的资源。
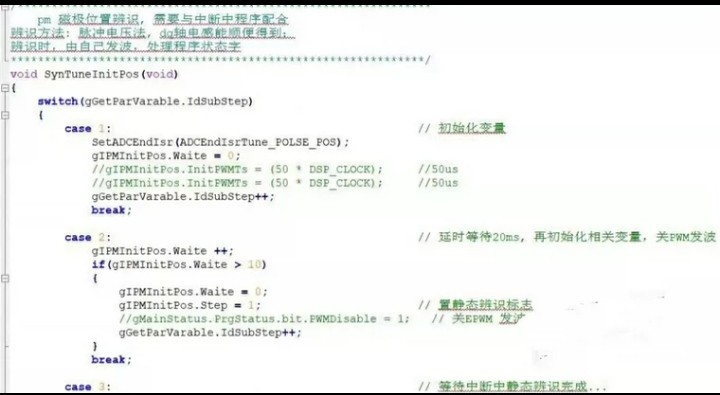
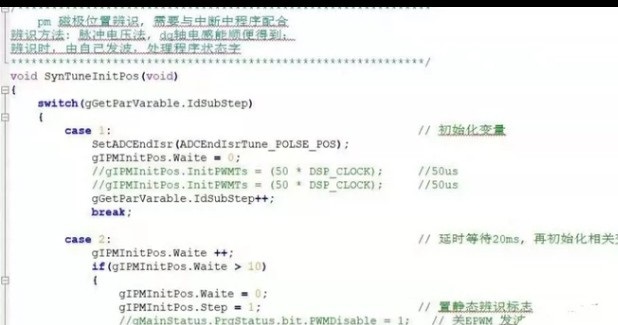
以初始化部分代码为例:
// 初始化ePWM模块
void InitEPWM(void)
{
// 使能ePWM1时钟
SysCtrlRegs.PCLKCR0.bit.TBCLKSYNC = 0;
SysCtrlRegs.PCLKCR1.bit.EPWM1ENCLK = 1;
// 配置ePWM1定时器
EPwm1Regs.TBCTL.bit.CTRMODE = TB_COUNT_UPDOWN;
EPwm1Regs.TBCTL.bit.PHSEN = TB_DISABLE;
EPwm1Regs.TBPRD = PWM_PERIOD;
// 其他相关配置...
}这段代码开启了28035芯片中ePWM1模块的时钟,并对其定时器进行了配置。选择了向上向下计数模式(TBCOUNTUPDOWN),关闭了相位使能(TBDISABLE),并设置了PWM周期(PWMPERIOD)。这些配置是为后续产生精确的PWM波形驱动PMSM做准备。
实际应用SOP代码解析
咱的代码可不是一般玩票性质的,是经过工程实践打磨的。下面看看滑模观测器核心代码片段:
// 滑模观测器计算反电动势
void SMO_Calculate(void)
{
float error_alpha = u_alpha - Rs * i_alpha - Ls * didt_alpha;
float error_beta = u_beta - Rs * i_beta - Ls * didt_beta;
float s_alpha = error_alpha;
float s_beta = error_beta;
float sign_s_alpha = (s_alpha > 0)? 1 : -1;
float sign_s_beta = (s_beta > 0)? 1 : -1;
e_alpha_est = K * sign_s_alpha;
e_beta_est = K * sign_s_beta;
// 低通滤波处理反电动势估计值
e_alpha_filt = (LPF_COEFF * e_alpha_filt) + ((1 - LPF_COEFF) * e_alpha_est);
e_beta_filt = (LPF_COEFF * e_beta_filt) + ((1 - LPF_COEFF) * e_beta_est);
}这里首先根据电压方程计算出\(\alpha\)和\(\beta\)轴上的误差(erroralpha和errorbeta),这误差反映了实际电压与观测器估算电压的差值。然后定义滑模面变量salpha和sbeta,直接使用误差值。接着通过判断滑模面变量的正负得到符号函数值(signsalpha和signsbeta)。利用这符号函数值和滑模增益K来估算反电动势(ealphaest和ebetaest)。最后,通过低通滤波器(系数为LPFCOEFF)对估算的反电动势进行滤波处理,得到相对平滑的反电动势估计值(ealphafilt和ebeta_filt),这能有效去除高频噪声,为后续准确估算转子位置和速度提供可靠数据。
通过这样的代码与模型结合,我们实现了PMSM永磁同步电机基于28035的无传感器滑模观测器控制,将工程实践与理论基础紧密相连,为实际应用提供了坚实的技术支撑。希望这篇博文能给在相关领域探索的小伙伴们一些启发。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 5
5 0
0- 0



 已为社区贡献4条内容
已为社区贡献4条内容

所有评论(0)