玩电机控制就像调教野马,没点算法仿真模型根本hold不住。今天咱们把永磁同步和异步电机的控制算法扒个底朝天,顺手扔几个仿真代码片段,让理论直接跟实操干架
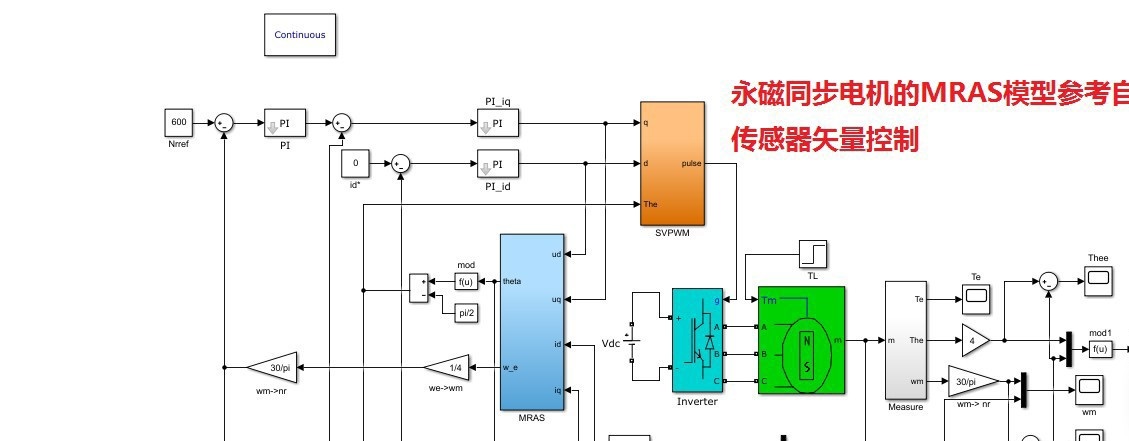
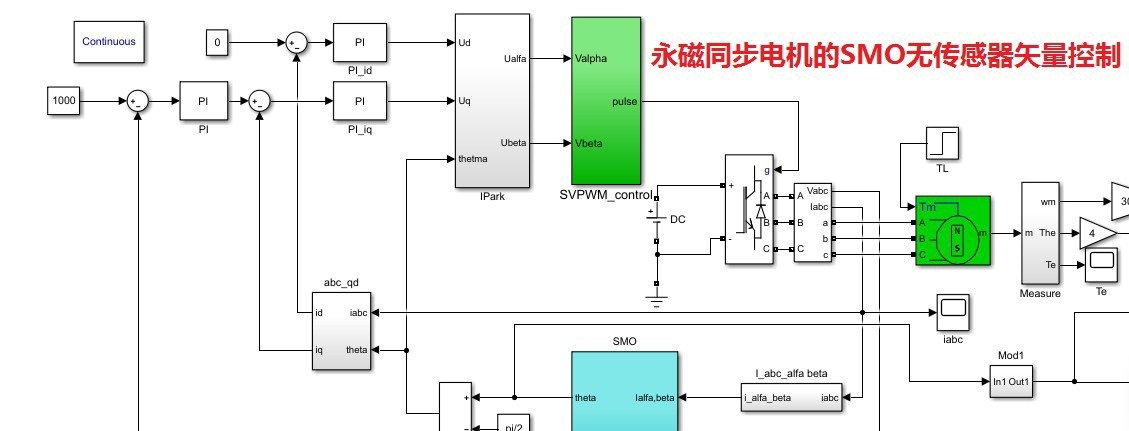
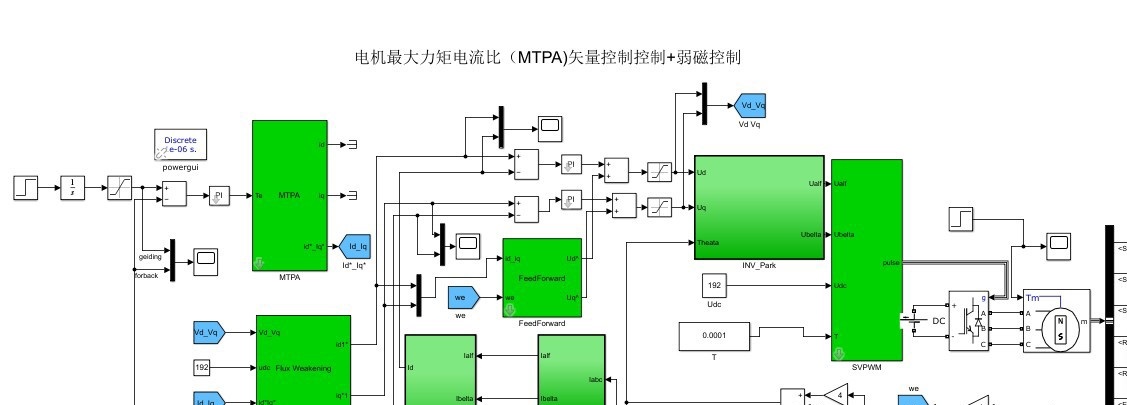
异步电机与同步电机的控制算法仿真模型大合集 1.PMSM矢量控制模型 2.感应异步电机的间接转子磁场定向控制 3.感应异步电机的有速度传感器矢量控制 4.感应异步电机的直接转矩控制 5.感应异步电机无传感器矢量控制 6.基于RLS的永磁同步电机的参数辨识 7.基于卡尔曼滤波器的永磁同步电机的无传感器矢量控制 8.异步电机的滑膜观测器算法仿真模型 9.异步电机最小二乘法参数辨识 10.永磁同步电机DTC直接转矩控制仿真模型 11.永磁同步电机的MRAS无传感器矢量控制 12.永磁同步电机的SMO无传感器矢量控制 13.永磁同步电机的磁场定向控制(矢量控制) 14.永磁同步电机的磁链观察模型 15.永磁同步电机的电流滞环控制 16.永磁同步电机的反步控制 17.永磁同步电机的高频注入 18.永磁同步电机的模型预测控制 19.永磁同步电机矢量控制MTPV+弱磁控制 20.永磁同步电机的位置控制
先说永磁同步电机(PMSM)这货,矢量控制绝对是基本操作。看这段Simulink里的电流环代码:
function iq_ref = CurrentLoop(id_actual, iq_actual, Te_ref)
Kp = 0.8; Ki = 15;
persistent integral_err;
torque_constant = 1.5;
iq_target = Te_ref / (torque_constant * id_actual);
err = iq_target - iq_actual;
integral_err = integral_err + err * Ts;
iq_ref = Kp * err + Ki * integral_err;
end这里藏着个骚操作——扭矩计算直接把id当分母用,搞弱磁控制时这招能让电机在高速区疯狂输出。注意Ki参数别瞎调,积分饱和分分钟让仿真爆炸。
异步电机这边,直接转矩控制(DTC)玩的就是心跳。下面这段滞环比较器代码够暴力:
def hysteresis_compare(flux_err, torque_err):
flux_band = 0.01 # 磁链滞环宽度
torque_band = 0.5 # 转矩滞环宽度
if flux_err > flux_band:
d_flux = 1
elif flux_err < -flux_band:
d_flux = -1
else:
d_flux = 0 # 维持当前状态
# 转矩判断同理
return voltage_vector_table[d_flux][d_torque]这算法跟开盲盒似的,滞环宽度设大了动态响应变慢,设小了开关频率飙升。实战中得拿着示波器曲线边看边调,仿真时记得把死区时间参数设准了。
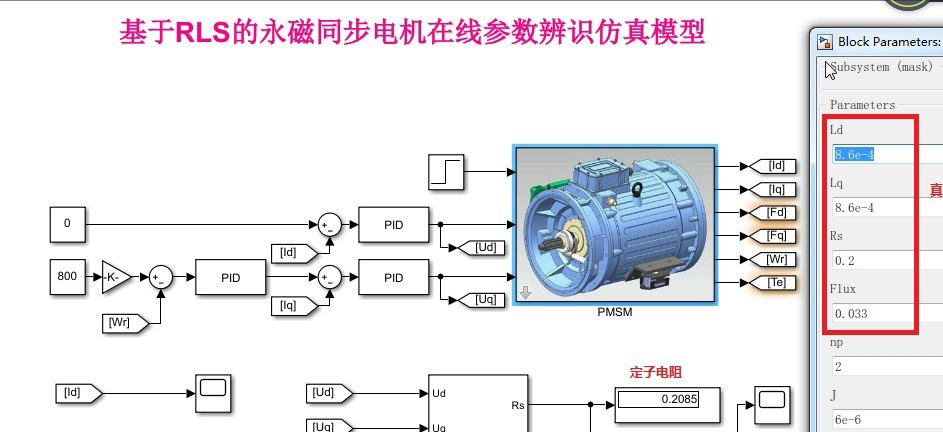
说到参数辨识,RLS算法在电机冷启动时巨有用。看这个递推实现:
void RLS_Update(float *theta, float P[2][2], float phi[2], float y) {
float K[2];
float denom = 1.0 + phi[0]*P[0][0]*phi[0] + phi[1]*P[1][1]*phi[1];
for(int i=0; i<2; i++){
K[i] = (P[i][0]*phi[0] + P[i][1]*phi[1]) / denom;
}
// 参数更新
theta[0] += K[0] * (y - phi[0]*theta[0] - phi[1]*theta[1]);
theta[1] += K[1] * (y - phi[0]*theta[0] - phi[1]*theta[1]);
// 协方差矩阵更新
P[0][0] -= K[0] * (P[0][0]*phi[0] + P[0][1]*phi[1]);
P[1][1] -= K[1] * (P[1][0]*phi[0] + P[1][1]*phi[1]);
}注意协方差矩阵P初始化别用单位矩阵,得放大100倍起步,不然收敛速度慢得想砸键盘。实测电阻辨识误差能压到3%以内,但电感参数得配合高频注入才准。
异步电机与同步电机的控制算法仿真模型大合集 1.PMSM矢量控制模型 2.感应异步电机的间接转子磁场定向控制 3.感应异步电机的有速度传感器矢量控制 4.感应异步电机的直接转矩控制 5.感应异步电机无传感器矢量控制 6.基于RLS的永磁同步电机的参数辨识 7.基于卡尔曼滤波器的永磁同步电机的无传感器矢量控制 8.异步电机的滑膜观测器算法仿真模型 9.异步电机最小二乘法参数辨识 10.永磁同步电机DTC直接转矩控制仿真模型 11.永磁同步电机的MRAS无传感器矢量控制 12.永磁同步电机的SMO无传感器矢量控制 13.永磁同步电机的磁场定向控制(矢量控制) 14.永磁同步电机的磁链观察模型 15.永磁同步电机的电流滞环控制 16.永磁同步电机的反步控制 17.永磁同步电机的高频注入 18.永磁同步电机的模型预测控制 19.永磁同步电机矢量控制MTPV+弱磁控制 20.永磁同步电机的位置控制
模型预测控制(MPC)现在火得一塌糊涂,代价函数搞不好就翻车:
function u_opt = MPC_Controller(x, ref)
horizon = 5;
cost = zeros(1,8); % 8个电压矢量
for k=1:horizon
for vec=1:8
x_pred = predict_model(x, vec);
cost(vec) = cost(vec) + abs(x_pred.iq - ref.iq)*10 ...
+ abs(x_pred.id - ref.id)*5 ...
+ switching_loss(vec, prev_vec);
end
end
[~, u_opt] = min(cost);
end预测步长别超过3步,不然计算量爆炸。权重系数建议扭矩误差项比磁链大3倍,这样动态响应才够猛。实测比传统PI控制转速波动小一半,就是CPU占用率感人。
玩无传感器算法时,卡尔曼滤波和滑模观测器得配合着用。特别是转子位置估算,这段混合算法实测有效:
def hybrid_estimator(ia, ib, omega):
# 卡尔曼滤波预处理
kalman_gain = 0.6
est_theta_kf = previous_theta + kalman_gain*(omega*Ts - previous_theta)
# 滑模补偿
s = (ia - est_ia_hat) * math.cos(est_theta_kf) - (ib - est_ib_hat) * math.sin(est_theta_kf)
theta_correction = 50 * np.sign(s)
return est_theta_kf + theta_correction*Ts低速时靠滑模观测器的抖振强行拉回真实位置,中高速切到卡尔曼滤波平滑输出。调试时先调滑模增益再整卡尔曼噪声参数,别反着来。
写完这些模型的最大感悟:别迷信理论公式,实际仿真中电机参数10%的误差就能让算法崩盘。多准备几组参数配置文件,仿真时先把电流环带宽调到1kHz以上再玩高级算法,毕竟基础不牢地动山摇。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 10
10 0
0- 0



 已为社区贡献17条内容
已为社区贡献17条内容

所有评论(0)