“小龙虾“保姆级本地部署安装运行::复杂三维山地环境下小龙虾优化算法COA求解多无人机动态避障路径规划研究,MATLAB代码
一、小龙虾优化算法COA
小龙虾优化算法(Crayfsh optimization algorithm,COA)由Jia Heming 等人于2023年提出,该算法模拟小龙虾的避暑、竞争和觅食行为,具有搜索速度快,搜索能力强,能够有效平衡全局搜索和局部搜索的能力。
小龙虾是一种形状类似于虾的甲壳类动物,其甲壳坚硬且颜色丰富。成体的小龙虾身长约5.6-11.9厘米,整体颜色包括红色、红棕色和粉红色。背部是酱暗红色,两侧则是粉红色,带有橘黄色或白色的斑点。甲壳部分近黑色,而腹部背面则有一楔形条纹。幼虾体为均匀的灰色,有时具有黑色波纹,其螯狭长,甲壳中部不被网眼状空隙分隔,甲壳上明显具有颗粒。
小龙虾属于杂食性动物,它们的饮食习性比较特殊。在河底,小龙虾更喜欢吃泥,并且喜欢吃已经死亡的小鱼或其他水中生物。除此之外,植物类、小鱼、小虾、浮游生物、底栖生物和藻类都可以成为它们的食物。
参考文献:
[1] Jia, H., Rao, H., Wen, C. et al. Crayfish optimization algorithm. Artif Intell Rev (2023). Crayfish optimization algorithm | SpringerLink
【"小龙虾"保姆级本地部署安装运行:基于复杂三维山地环境下的小龙虾优化算法COA求解多无人机动态避障路径规划研究,MATLAB代码】 https://www.bilibili.com/video/BV1RnwAzpEfH/?share_source=copy_web&vd_source=8a15dca68010ae8fdb76efa47fd454a2
【一键式部署“小龙虾”:基于复杂三维山地环境下的小龙虾优化算法COA求解多无人机动态避障路径规划研究,MATLAB代码】 https://www.bilibili.com/video/BV1i7wAzxESd/?share_source=copy_web&vd_source=8a15dca68010ae8fdb76efa47fd454a2
二、无人机(UAV)三维路径规划
单个无人机三维路径规划数学模型参考如下文献:
Phung M D , Ha Q P . Safety-enhanced UAV Path Planning with Spherical Vector-based Particle Swarm Optimization[J]. arXiv e-prints, 2021.
每个无人机的目标函数由路径长度成本,安全性与可行性成本、飞行高度成本和路径平滑成本共同组成:
2.1路径长度成本
路径长度成本由相邻两个节点之间的欧氏距离和构成,其计算公式如下:
2.2路径安全性与可行性成本

路径安全性与可行性成本通过下式计算:

2.3路径飞行高度成本

飞行高度成本通过如下公式计算所得:

2.4路径平滑成本

投影向量通过如下公式计算:

转弯角度的计算公式为:
爬坡角度的计算公式为:

平滑成本的计算公式为:
2.5总成本(目标函数)

总成本由最优路径成本,安全性与可行性成本、飞行高度成本和路径平滑成本的线性加权所得。其中,b为加权系数。
2.6 动态窗口法原理
动态窗口法的核心思想是在速度空间中搜索最优速度向量,用于无人机动态避障其核心步骤包括:
- 速度窗口采样:根据无人机运动学约束,生成可行速度集 V s a m p l e V_{sample} Vsample;
- 轨迹预测:对每个采样速度,预测未来一段时间内的无人机轨迹;
- 评价函数计算:通过评价函数评估每条预测轨迹的优劣,筛选出最优轨迹对应的速度;
- 速度更新:将最优速度作为无人机的当前运动速度,完成局部路径规划。
评价函数包含目标趋近度、避障安全性和速度平滑性三个指标,其表达式为:
G ( v , ω ) = α ⋅ h e a d i n g ( v , ω ) + β ⋅ d i s t ( v , ω ) + γ ⋅ v e l o c i t y ( v , ω ) G(v,\omega)=\alpha \cdot heading(v,\omega)+\beta \cdot dist(v,\omega)+\gamma \cdot velocity(v,\omega) G(v,ω)=α⋅heading(v,ω)+β⋅dist(v,ω)+γ⋅velocity(v,ω)
其中, α , β , γ \alpha,\beta,\gamma α,β,γ 为权重系数, h e a d i n g heading heading 表示轨迹与目标方向的夹角, d i s t dist dist 表示轨迹与障碍物的最小距离, v e l o c i t y velocity velocity 表示轨迹的速度大小。
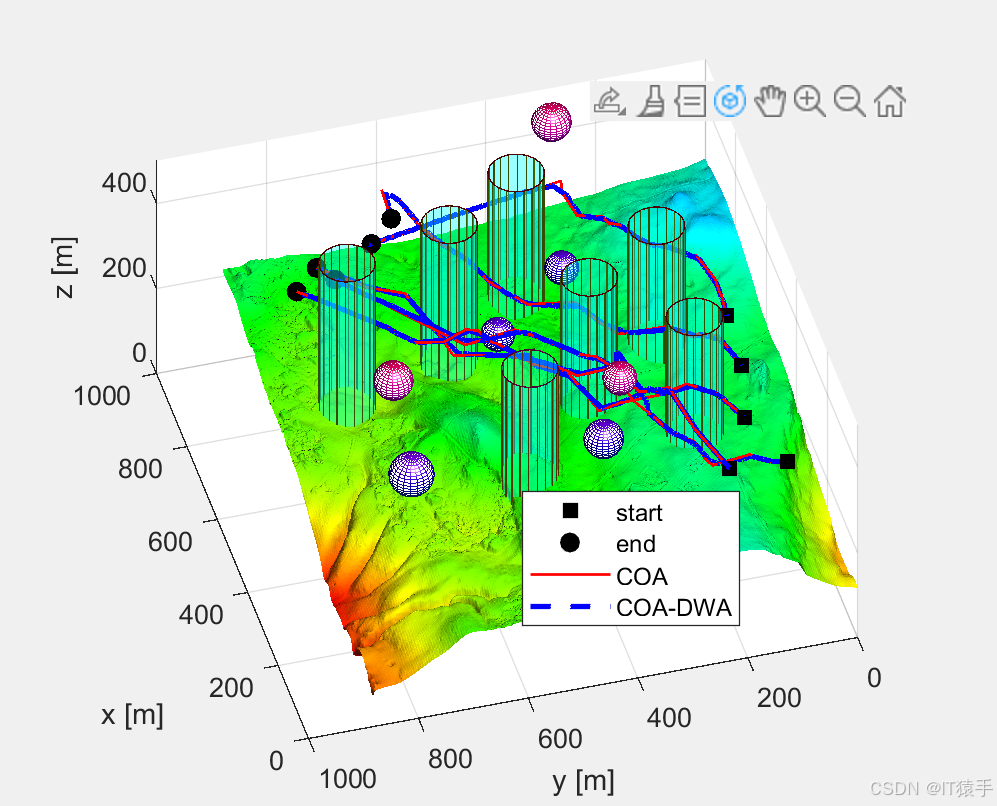
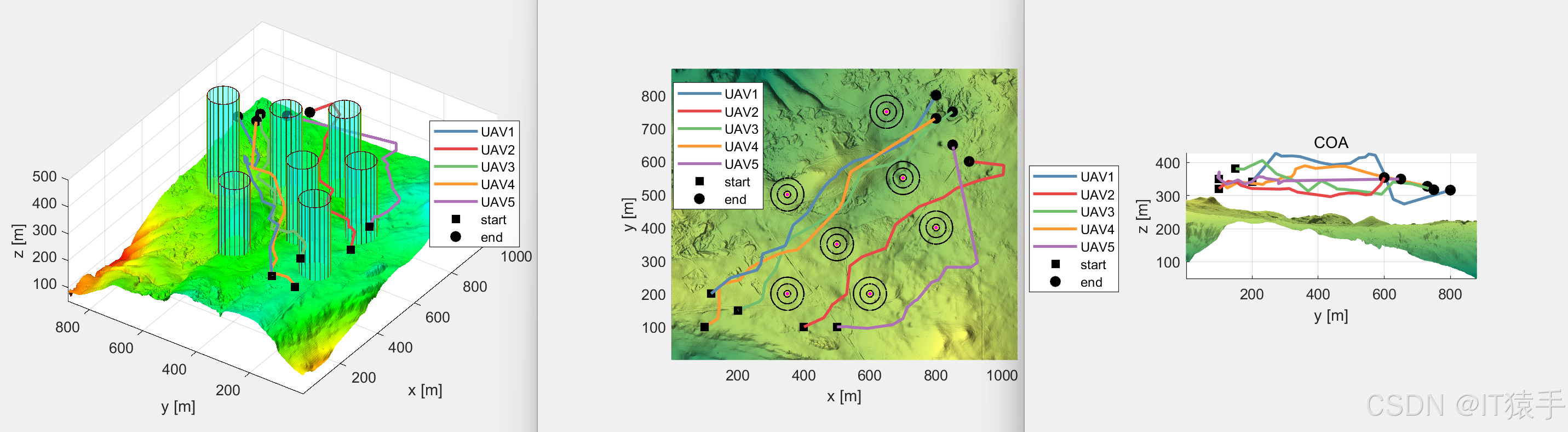
三、实验结果
点击查看多无人机动态避障路径规划代码及效果演示
在三维无人机路径规划中,无人机的路径由起点,终点以及起始点间的点共同连接而成。因此,自变量为无人机起始点间的各点坐标,每个无人机的目标函数为总成本(公式9)。本文研究3个无人机协同路径规划,总的目标函数为3个无人机的总成本之和。
%% 第一个无人机 起始点
start_location = [120;200;100];
end_location = [800;800;150];
ModelUAV(1).model.start=start_location;
ModelUAV(1).model.end=end_location;
%% 第二个无人机 起始点
start_location = [400;100;100];
end_location = [900;600;150];
ModelUAV(2).model.start=start_location;
ModelUAV(2).model.end=end_location;
%% 第三个无人机 起始点
start_location = [200;150;150];
end_location =[850;750;150];
ModelUAV(3).model.start=start_location;
ModelUAV(3).model.end=end_location;
%% 第四个无人机 起始点
start_location = [100;100;150];
end_location = [800;730;150];
ModelUAV(4).model.start=start_location;
ModelUAV(4).model.end=end_location;
%% 第5个无人机 起始点
start_location = [500;100;130];
end_location = [850;650;150];
ModelUAV(5).model.start=start_location;
ModelUAV(5).model.end=end_location;
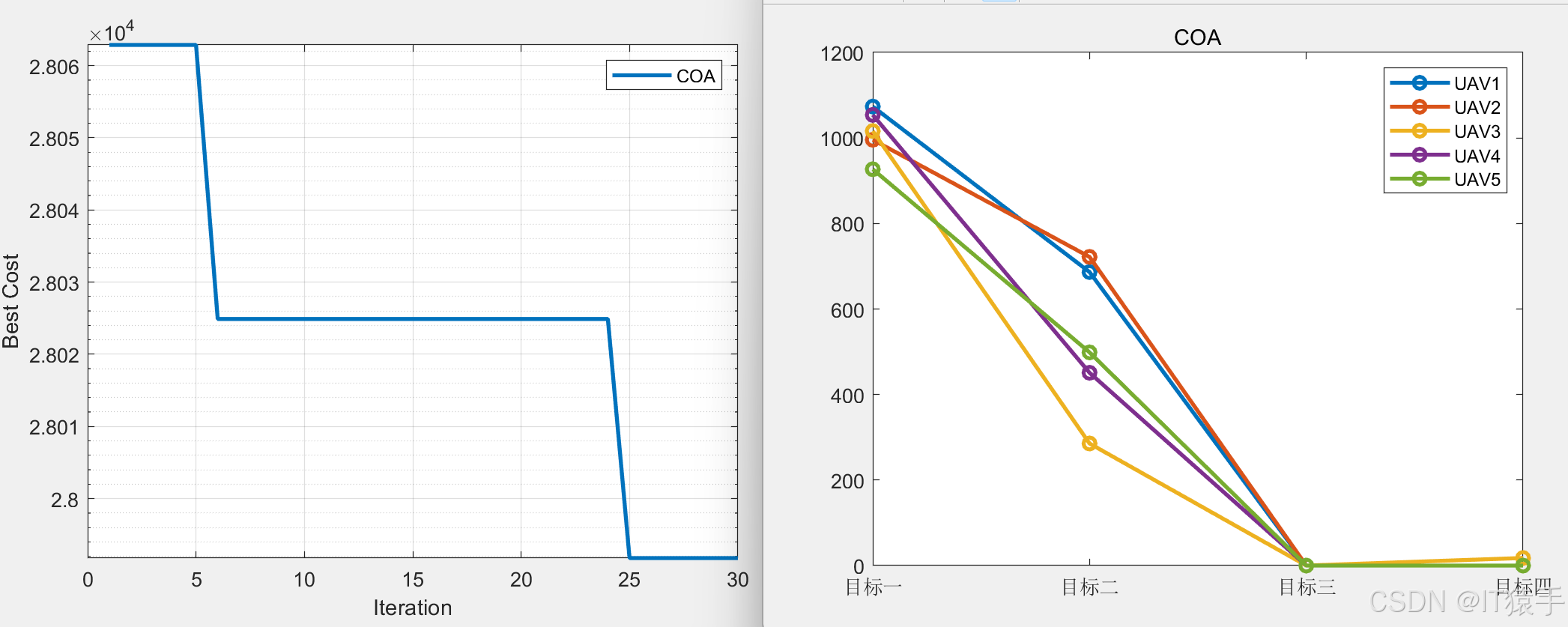
figure
plot(Convergence_curve,'LineWidth',2)
xlabel('Iteration');
ylabel('Best Cost');
grid on;
四、完整MATLAB代码见下方名片
【"小龙虾"保姆级本地部署安装运行:基于复杂三维山地环境下的小龙虾优化算法COA求解多无人机动态避障路径规划研究,MATLAB代码】 https://www.bilibili.com/video/BV1RnwAzpEfH/?share_source=copy_web&vd_source=8a15dca68010ae8fdb76efa47fd454a2
【一键式部署“小龙虾”:基于复杂三维山地环境下的小龙虾优化算法COA求解多无人机动态避障路径规划研究,MATLAB代码】 https://www.bilibili.com/video/BV1i7wAzxESd/?share_source=copy_web&vd_source=8a15dca68010ae8fdb76efa47fd454a2

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐


 26
26 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)