低压无感BLDC方波控制方案分享
电机控制器,低压无感BLDC方波控制,全部源码,方便调试移植! 1.通用性极高,图片中的电机,一套参数即可启动。 2. ADC方案 3.电转速最高12w 4.电感法和普通三段式 5.按键启动和调速 6.开环,速度环,限流环 7.参数调整全部宏定义,方便调试! 代码全部源码
最近在做一个电机控制器的项目,主要针对低压无感BLDC电机的方波控制。经过一段时间的调试和优化,终于把整个方案稳定下来了。今天就来分享一下这个方案的核心思路和代码实现,希望能给有类似需求的朋友们一些参考。
项目背景
这个方案的核心目标是实现一个通用性高、易于调试和移植的BLDC电机控制器。BLDC(Brushless DC Motor,无刷直流电机)因其高效、耐用的特点,被广泛应用于各种场景。而方波控制作为一种经典的控制方式,虽然精度不如正弦波控制,但在成本和实现难度上更具优势。
方案特点
- 通用性极高:一套参数即可启动不同型号的电机,极大简化了调试过程。
- ADC方案:采用ADC(模数转换器)采集相电流,用于电机的转速计算和电流检测。
- 高电转速支持:电转速最高可达12万转/分钟,满足高性能应用场景。
- 电感法和普通三段式:支持两种不同的控制方式,用户可以根据需求灵活选择。
- 按键启动和调速:通过按键实现电机的启动、停止和调速功能,操作简单直观。
- 多环控制:支持开环、速度环和限流环,满足不同控制需求。
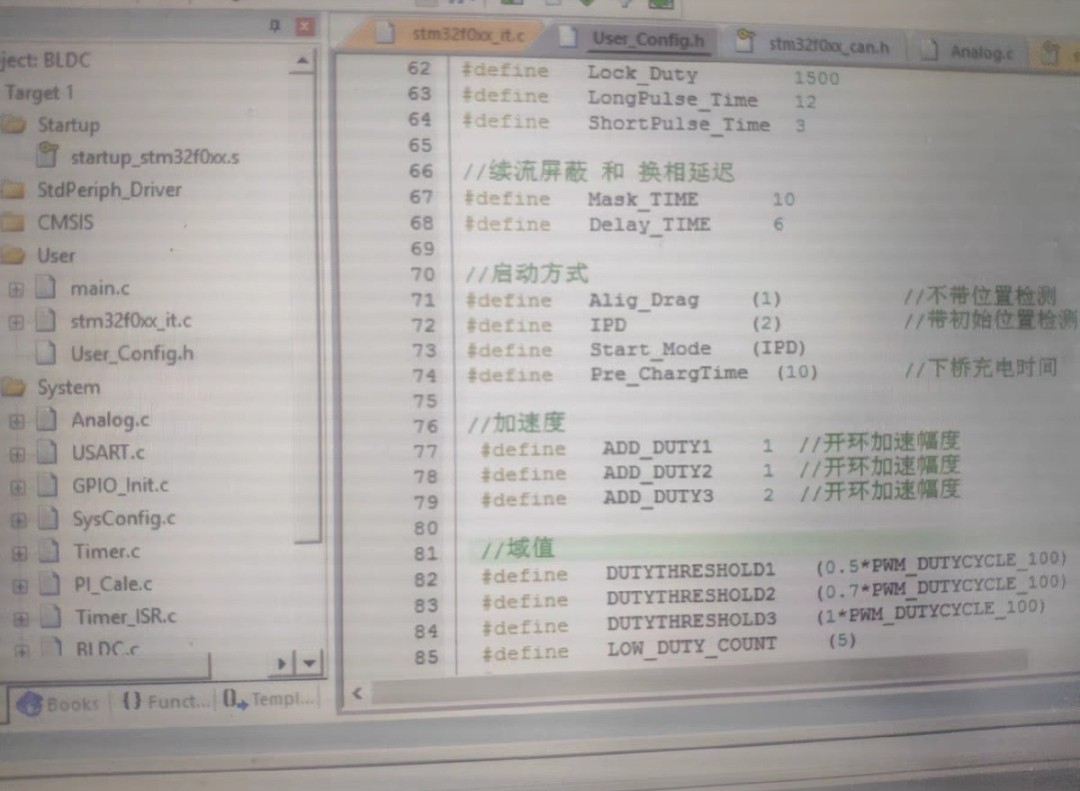
- 参数调整方便:所有参数均通过宏定义实现,方便用户快速调整。
核心代码实现
1. ADC配置与采样
ADC用于采集相电流信号,是整个控制方案的重要组成部分。
// ADC初始化配置
void ADC_Init(void) {
ADC_InitTypeDef ADC_InitStructure;
GPIO_InitTypeDef GPIO_InitStructure;
// 使能GPIOA和ADC1的时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA | RCC_APB2Periph_ADC1, ENABLE);
// 配置ADC输入通道
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0; // 例如,PA0作为ADC输入
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AIN;
GPIO_Init(GPIOA, &GPIO_InitStructure);
// 配置ADC
ADC_InitStructure.ADC_Mode = ADC_Mode_Independent;
ADC_InitStructure.ADC_ScanConvMode = DISABLE;
ADC_InitStructure.ADC_ContinuousConvMode = DISABLE;
ADC_InitStructure.ADC_ExternalTrigConv = ADC_ExternalTrigConv_None;
ADC_InitStructure.ADC_DataAlign = ADC_DataAlign_Right;
ADC_InitStructure.ADC_NbrOfChannel = 1;
ADC_Init(ADC1, &ADC_InitStructure);
}
// 采样相电流
uint16_t Read_Phase_Current(void) {
ADC_Cmd(ADC1, ENABLE); // 启动ADC
ADC_SoftwareStartConv(ADC1); // 软件触发采样
while(ADC_GetFlagStatus(ADC1, ADC_FLAG_EOC) == RESET); // 等待采样完成
return ADC_GetConversionValue(ADC1); // 获取采样值
}2. 方波控制核心逻辑
方波控制的核心是根据电机的转子位置生成PWM信号。
// 计算电角度
void Calculate_Electrical_Angle(void) {
static uint16_t last_counter = 0;
uint16_t current_counter = Timer_GetCounterValue(); // 获取定时器计数值
uint16_t delta = current_counter - last_counter;
// 根据计数值计算电角度
electrical_angle += delta * KP;
if (electrical_angle >= 360) {
electrical_angle -= 360;
}
last_counter = current_counter;
}
// 生成PWM信号
void Generate_PWM(void) {
uint16_t pwm_value = 0;
// 根据电角度计算PWM占空比
if (electrical_angle < 60) {
pwm_value = Duty_Cycle;
} else if (electrical_angle < 120) {
pwm_value = 0;
} else if (electrical_angle < 180) {
pwm_value = Duty_Cycle;
} else if (electrical_angle < 240) {
pwm_value = 0;
} else if (electrical_angle < 300) {
pwm_value = Duty_Cycle;
} else {
pwm_value = 0;
}
// 输出PWM信号
Set_PWM_Output(pwm_value);
}3. 转速计算与控制
通过采样周期计算电机的转速,并根据需求调整PWM占空比。
// 计算电机转速
void Calculate_Speed(void) {
static uint32_t last_time = 0;
uint32_t current_time = Get_Current_Time();
uint32_t period = current_time - last_time;
// 计算转速(转/分钟)
speed = (60 * 1000) / period;
// 限制转速
if (speed > MAX_SPEED) {
speed = MAX_SPEED;
}
last_time = current_time;
}
// 转速控制
void Speed_Control(void) {
if (speed < TARGET_SPEED) {
Duty_Cycle += 1; // 提高占空比
} else if (speed > TARGET_SPEED) {
Duty_Cycle -= 1; // 降低占空比
}
// 限制占空比范围
if (Duty_Cycle > 100) {
Duty_Cycle = 100;
} else if (Duty_Cycle < 0) {
Duty_Cycle = 0;
}
}方案优势总结
- 通用性强:一套参数即可适配多种电机,减少了重复调试的工作量。
- 高电转速支持:最高支持12万转/分钟,满足高性能需求。
- 多种控制方式:支持电感法和普通三段式,用户可以根据需求灵活选择。
- 按键操作:通过按键实现启动、停止和调速,操作简单直观。
- 多环控制:支持开环、速度环和限流环,满足不同控制需求。
- 参数调整方便:所有参数均通过宏定义实现,方便用户快速调整。
总结
这个低压无感BLDC方波控制方案经过多次调试和优化,已经非常稳定,适合用于各种应用场景。代码完全开源,方便大家直接使用和移植。如果大家在使用过程中有任何问题,欢迎随时交流!
电机控制器,低压无感BLDC方波控制,全部源码,方便调试移植! 1.通用性极高,图片中的电机,一套参数即可启动。 2. ADC方案 3.电转速最高12w 4.电感法和普通三段式 5.按键启动和调速 6.开环,速度环,限流环 7.参数调整全部宏定义,方便调试! 代码全部源码
代码下载地址:点击下载

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐


 1
1 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)