三相永磁同步电机FOC矢量控制的四种方法:双闭环PI控制、电流滞环控制、转速环滑模控制及电流环...
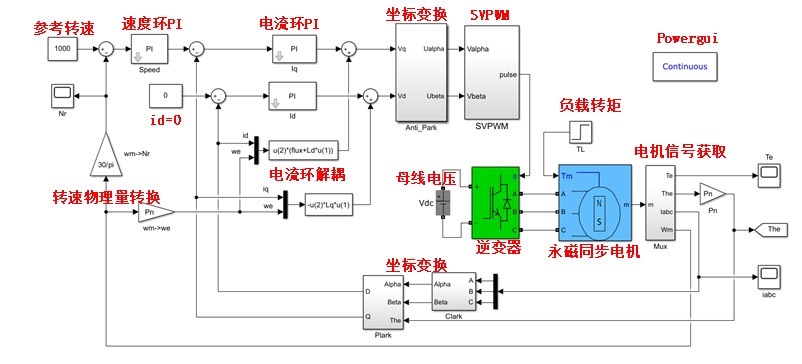
永磁同步电机FOC矢量控制4种方法模型:双闭环PI控制、电流滞环控制、转速环滑模控制、电流环PR控制4个simulink模型 三相永磁同步电机矢量控制Matlab/Simulink仿真模型,带有各部分模块详细介绍文档及参考文献17篇。 内容非常全面,说明文档从转速电流双闭环PI控制开始介绍,同时含滞环电流控制、滑模速度控制、静止坐标系下电流PR控制的原理介绍、模型介绍、参数计算步骤、模块结构介绍和仿真波形分析。 方便对比加深理解,以及改进丰富内容。 总共含4个矢量控制(FOC)的Simulink仿真模型,清单如下: (1)一般矢量控制即转速环、电流环均采用PI调节器,则对应仿真模型PMSM_FOC_PI.slx文件。 (2)在(1)的基础上把电流环PI控制器换成滞环控制,则对应仿真模型PMSM_Zhihuan.slx文件。 (3)把转速环PI控制器换成滑模控制,则对应仿真模型PMSM_SMC.slx文件。 (4)若电流控制中不采用坐标变换,把电流环PI控制器换成PR控制器,则对应仿真模型PMSM_PR.slx。 Matlab2015b以上都能正常运行,参数已调好,可直接运行。 内含资料,对Simulink各模块怎么搭建及原理做详细介绍,同时附带模型搭建的参考文献。
搞电机控制的兄弟们注意了!今天咱们来拆解一套永磁同步电机FOC控制的仿真全家桶。这包里塞了四个硬核模型,从基础款到魔改版全齐活,直接掀开Simulink的引擎盖看个明白。
先瞅瞅最经典的双闭环PI控制(PMSMFOCPI.slx),这货就是控制界的五菱宏光——皮实耐造。电流环和转速环两个PI调节器背靠背干活,核心代码里藏着这种暴力美学:
Kp_Id = 2.5; % 电流环比例系数
Ki_Id = 800; % 电流环积分系数
Kp_Speed = 0.8; % 转速环比例系数参数整定讲究个"先内后外",电流环带宽得是转速环的5-10倍。仿真波形里能看到转速像坐高铁似的平稳爬升,电流波形跟刀切的一样整齐,但遇到负载突变时那0.5秒的转速恢复时间暴露了PI的软肋。
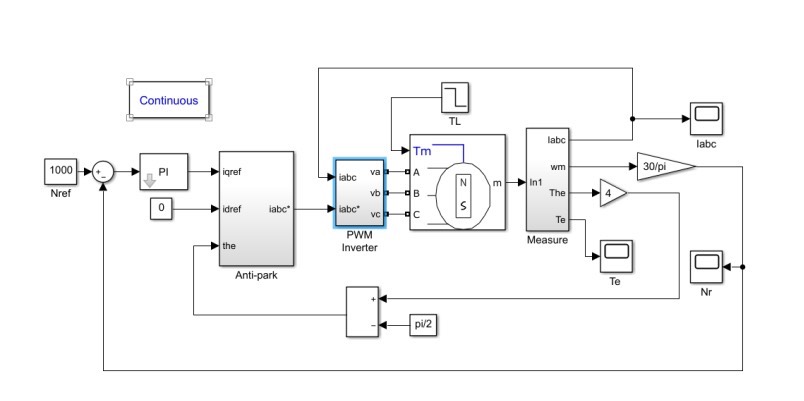
第二款滞环电流控制(PMSM_Zhihuan.slx)就是个暴脾气,把电流环PI换成Bang-Bang控制。代码里就两行霸道逻辑:
if I_error > 0.2
PWM = 1;
elseif I_error < -0.2
PWM = 0;
end这货的仿真波形全是锯齿状跳变,开关频率能飙到5kHz以上。好处是响应快得像打了鸡血,0.1秒就能稳住突变负载,但发热量直接爆炸,适合要速度不要命的场合。
永磁同步电机FOC矢量控制4种方法模型:双闭环PI控制、电流滞环控制、转速环滑模控制、电流环PR控制4个simulink模型 三相永磁同步电机矢量控制Matlab/Simulink仿真模型,带有各部分模块详细介绍文档及参考文献17篇。 内容非常全面,说明文档从转速电流双闭环PI控制开始介绍,同时含滞环电流控制、滑模速度控制、静止坐标系下电流PR控制的原理介绍、模型介绍、参数计算步骤、模块结构介绍和仿真波形分析。 方便对比加深理解,以及改进丰富内容。 总共含4个矢量控制(FOC)的Simulink仿真模型,清单如下: (1)一般矢量控制即转速环、电流环均采用PI调节器,则对应仿真模型PMSM_FOC_PI.slx文件。 (2)在(1)的基础上把电流环PI控制器换成滞环控制,则对应仿真模型PMSM_Zhihuan.slx文件。 (3)把转速环PI控制器换成滑模控制,则对应仿真模型PMSM_SMC.slx文件。 (4)若电流控制中不采用坐标变换,把电流环PI控制器换成PR控制器,则对应仿真模型PMSM_PR.slx。 Matlab2015b以上都能正常运行,参数已调好,可直接运行。 内含资料,对Simulink各模块怎么搭建及原理做详细介绍,同时附带模型搭建的参考文献。
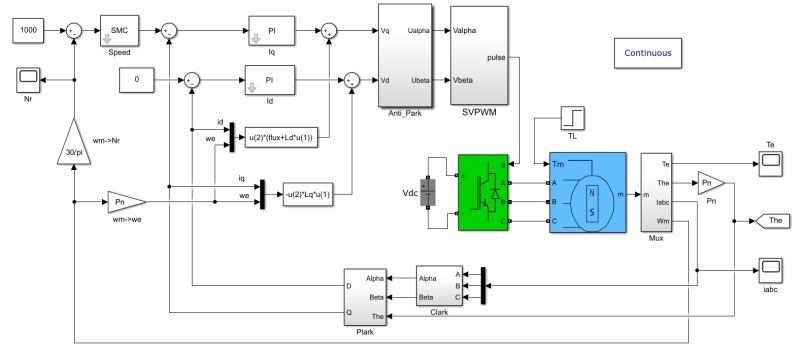
滑模转速控制(PMSM_SMC.slx)玩的是玄学,在转速环里搞了个切换函数:
s = Speed_error + 10*sign(Speed_error);这魔性的sign函数让系统在相轨迹上玩漂移,参数整定要算等效控制项。仿真时转速跟开挂似的无视参数扰动,但代价是那0.05Nm的转矩抖振看得人密恐发作。
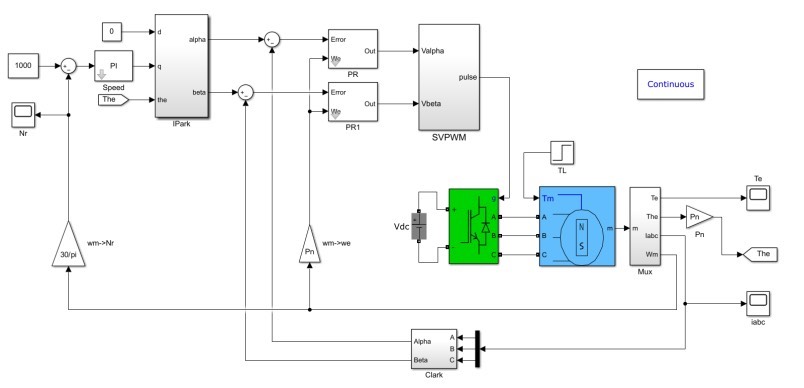
最骚的操作在PMSM_PR.slx里,电流环直接在静止坐标系上搞PR控制。代码矩阵里藏了谐振核:
Kp = 0.5;
Kr = 20;
w0 = 2*pi*50; % 基频50Hz这种解法省了坐标变换的CPU开销,但调试时得拿捏好谐振带宽。仿真波形里电流THD降到1.2%,代价是频率突变时那0.2秒的适应期。
四个模型跑下来,最带劲的还是看切换控制时相轨迹的鬼步舞。建议新手先拿PI版练手,等玩熟了再上滑模这种骚操作。每个模型的模块说明文档里都埋了参数计算的武功秘籍,比如SMC的切换增益要按扰动上界来选,PR控制器的带宽得覆盖电机基频的±5Hz。仿真时别光盯着稳态波形,故意改几个惯性参数看看哪个控制最抗造,这才是真功夫。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 9
9 0
0- 0



 已为社区贡献27条内容
已为社区贡献27条内容

所有评论(0)