探索电动汽车VCU与BMS的HIL硬件在环仿真之旅
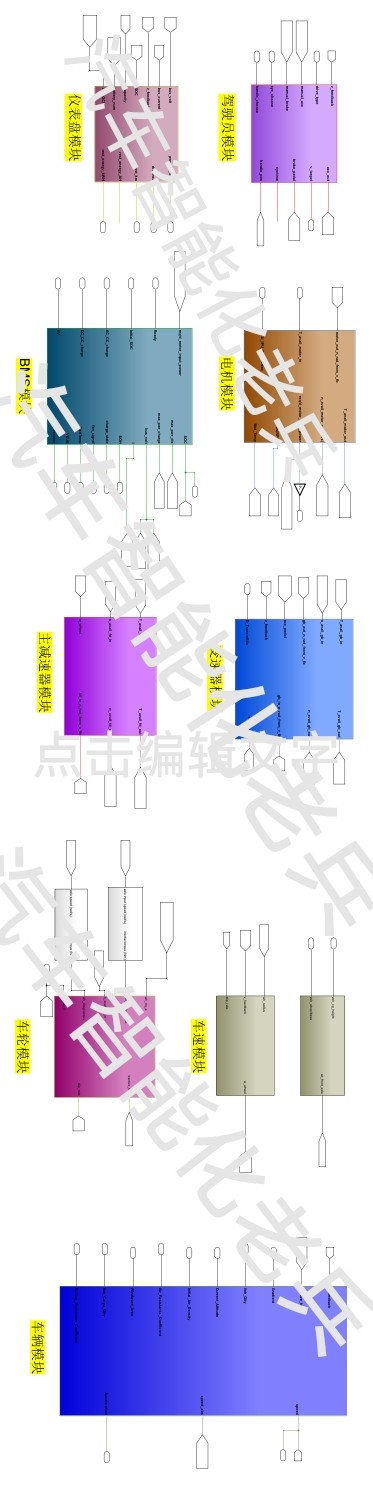
电动汽车VCU hil BMS hil硬件在环仿真 其中包含新能源电动汽车整车建模说明书, hil模型包含驾驶员模块,仪表模块,BCU整车控制器模块,MCU电机模块,TCU变速箱模块,减速器模块,BMS电池管理模块,整车模块及HIL仿真接口模块等。
在新能源电动汽车的发展浪潮中,硬件在环(HIL)仿真扮演着至关重要的角色,尤其是针对整车控制器(VCU)和电池管理系统(BMS)。今天就来深入聊聊这个有趣又关键的领域。
一、整车建模说明书的基石作用
新能源电动汽车整车建模说明书可是整个HIL仿真的“宝典”。它详细描绘了车辆各个部件如何协同工作,从动力输出到能量回收,每一个细节都被记录其中。就像盖房子的蓝图,没有它,后续的HIL模型搭建就如同无本之木。
二、丰富的HIL模型模块
1. 驾驶员模块
这个模块就像是仿真世界里的“司机”。它接收用户输入,比如加速踏板、制动踏板的信号,然后转化为整车可执行的指令。以下是简单的Python代码模拟驾驶员模块对加速踏板信号的处理:
class DriverModule:
def __init__(self):
self.accelerator_pedal_position = 0
def set_accelerator_pedal(self, position):
if 0 <= position <= 100:
self.accelerator_pedal_position = position
else:
print("Invalid accelerator pedal position")
def get_accelerator_signal(self):
return self.accelerator_pedal_position / 100.0分析:这段代码定义了一个DriverModule类,通过setacceleratorpedal方法设置加速踏板位置,并进行了范围检查,防止不合理的输入。getacceleratorsignal方法则将踏板位置转化为0到1之间的信号,以便后续模块使用。
2. 仪表模块
它负责实时显示车辆的各种状态信息,如车速、电量等。在实际的仿真环境中,可能会调用图形化库来展示这些信息。以Python的Tkinter库为例,简单代码如下:
import tkinter as tk
class InstrumentModule:
def __init__(self, root):
self.root = root
self.speed_label = tk.Label(root, text="Speed: 0 km/h")
self.speed_label.pack()
def update_speed(self, speed):
self.speed_label.config(text=f"Speed: {speed} km/h")分析:这里创建了一个InstrumentModule类,使用Tkinter库创建一个简单的窗口并显示车速信息。update_speed方法用于实时更新车速显示。
3. BCU整车控制器模块
BCU是整车的“大脑”之一,协调各个模块之间的工作。它接收来自驾驶员模块、BMS等的信号,然后做出决策,控制MCU等模块。在实际编程中,可能使用C语言实现复杂的逻辑控制,以下是一个简化的逻辑示例:
#include <stdio.h>
// 假设这些是来自其他模块的输入
int accelerator_signal;
int battery_state;
void bcu_control() {
if (accelerator_signal > 0 && battery_state > 50) {
printf("BCU: Sending signal to MCU to increase power\n");
} else {
printf("BCU: Adjusting power based on input signals\n");
}
}分析:这段C代码根据加速信号和电池状态来模拟BCU做出决策,向MCU发送相应指令。实际情况会更加复杂,涉及到更多的传感器数据和控制策略。
4. MCU电机模块
它主要根据BCU的指令来精确控制电机的转速和扭矩。例如,在Matlab/Simulink环境中搭建电机模型,可以通过以下简单的传递函数模拟电机转速响应:
num = [1];
den = [0.1 1];
sys = tf(num, den);分析:这段Matlab代码创建了一个简单的一阶传递函数模型,来近似电机对输入信号的动态响应。实际的电机模型会包含更多参数和复杂的物理特性。
5. TCU变速箱模块、减速器模块
TCU根据车速、发动机转速等信号控制变速箱换挡,减速器则将电机的高转速、低扭矩转化为车轮所需的低转速、高扭矩。虽然具体实现较为复杂,但基本原理都是通过控制传动比来实现动力传输的优化。
6. BMS电池管理模块
BMS对于电动汽车至关重要,它实时监测电池的电压、电流、温度等参数,确保电池安全、高效运行。以下是Python代码模拟BMS对电池电压的监测:
class BMSModule:
def __init__(self):
self.battery_voltage = 0
def update_voltage(self, voltage):
self.battery_voltage = voltage
def check_voltage(self):
if self.battery_voltage < 300:
print("BMS: Battery voltage is low, take appropriate action")
else:
print("BMS: Battery voltage is normal")分析:BMSModule类通过updatevoltage方法更新电池电压,checkvoltage方法检查电压是否在正常范围内,以便采取相应措施。
7. 整车模块及HIL仿真接口模块
整车模块将上述各个模块整合在一起,模拟真实车辆的运行。HIL仿真接口模块则负责连接实际硬件与仿真模型,实现数据交互。这两个模块是整个HIL仿真系统的“粘合剂”,确保系统的完整性和功能性。
电动汽车VCU hil BMS hil硬件在环仿真 其中包含新能源电动汽车整车建模说明书, hil模型包含驾驶员模块,仪表模块,BCU整车控制器模块,MCU电机模块,TCU变速箱模块,减速器模块,BMS电池管理模块,整车模块及HIL仿真接口模块等。
通过对这些模块的深入了解和协同工作,我们能够在HIL仿真环境中高度模拟新能源电动汽车的真实运行情况,为VCU和BMS的研发、测试提供有力支持,推动电动汽车技术不断向前发展。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐


 4
4 0
0- 0



 已为社区贡献21条内容
已为社区贡献21条内容

所有评论(0)