二自由度车辆动力学模型详解:模块化建模方法、Matlab Simulink源码及应用场景分析
二自由度车辆动力学模型 软件使用:Matlab/Simulink 适用场景:采用模块化建模方法,适用于多种工况场景。 产品simulink源码包含如下模块: 包含模块: 二自由度车辆动力学模型 包含:simulink源码文件,详细建模说明文档或参考文献,对应参考资料及相关文献
当二自由度车辆模型遇上Simulink模块化整活
搞车辆动力学的小伙伴们应该都见过这个经典模型——二自由度车辆动力学。它把车辆简化成横向和纵向两个运动方向,虽然不如十八自由度模型那么炫酷,但胜在计算快、参数少,特别适合做控制算法测试或者快速仿真。今天咱们用Matlab/Simulink拆解这个模型的模块化实现,手把手看看怎么搭出个能跑能拐弯的"钢铁盒子"。
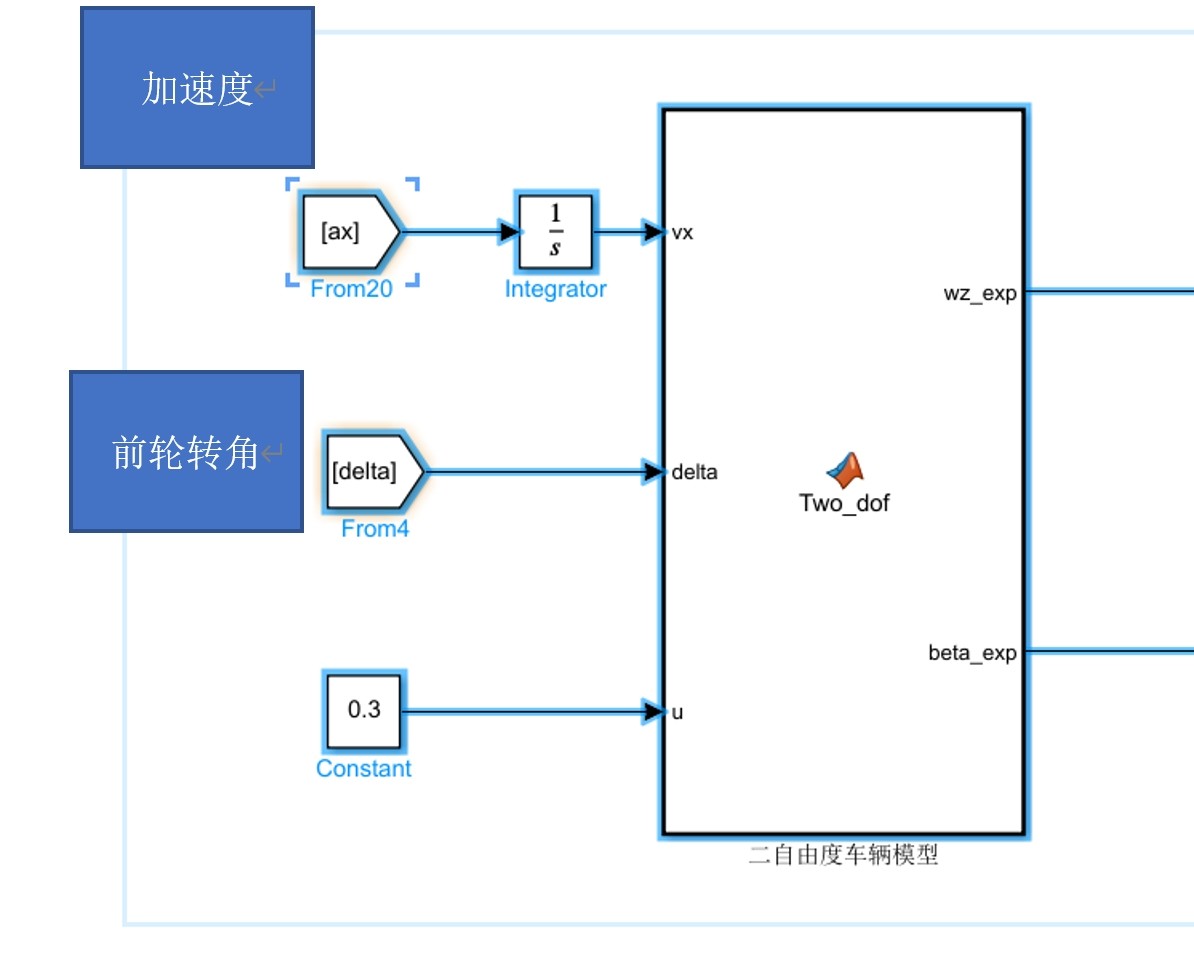
先甩个模型架构图镇楼(假装有图)。整个Simulink模型分成四大块:输入模块(方向盘转角+油门刹车)、动力学计算内核、轮胎力计算器、输出观测模块。最核心的当属动力学计算部分,咱们重点看这段:
% 状态空间方程实现片段
function dxdt = vehicleDynamics(t, x, u)
% 状态量: x = [vx vy r]^T (纵向速度/横向速度/横摆角速度)
% 输入量: u = [delta Fx]^T (前轮转角/驱动力)
% 从参数结构体加载车辆参数
m = params.m; % 整车质量
Iz = params.Iz; % 转动惯量
lf = params.lf; % 前轴到质心距离
lr = params.lr; % 后轴到质心距离
% 轮胎侧向力计算(魔术公式调用)
Fyf = magicFormula(u(1), x(1), x(2)+lf*x(3));
Fyr = magicFormula(0, x(1), x(2)-lr*x(3));
% 动力学方程
dxdt = zeros(3,1);
dxdt(1) = (u(2) - (Fyf*sin(u(1)))/m) + x(2)*x(3); % 纵向加速度
dxdt(2) = (Fyf*cos(u(1)) + Fyr)/m - x(1)*x(3); % 横向加速度
dxdt(3) = (lf*Fyf*cos(u(1)) - lr*Fyr)/Iz; % 横摆角加速度
end这段代码把车辆运动学方程写得明明白白。注意看第12行的magicFormula调用,这里藏着轮胎模型的灵魂。魔术公式(Magic Formula)通过查表或拟合的方式计算侧偏力,比线性模型更贴近真实情况。比如当车辆发生漂移时,这个非线性模块能让仿真结果瞬间变得"暴躁"起来。
再来看Simulink里的实现技巧。动力学内核被封装成一个Atomic Subsystem,双击展开能看到三个Integrator模块分别对应vx、vy、r的状态更新。这里有个骚操作——把质量参数m和转动惯量Iz做成了Mask参数,改参数时不用翻代码,直接在模块界面上输入数字就行,对经常需要换车型参数的测试狗极其友好。
二自由度车辆动力学模型 软件使用:Matlab/Simulink 适用场景:采用模块化建模方法,适用于多种工况场景。 产品simulink源码包含如下模块: 包含模块: 二自由度车辆动力学模型 包含:simulink源码文件,详细建模说明文档或参考文献,对应参考资料及相关文献
轮胎模块的复用性设计是另一个亮点。模块输入接的是滑移率和侧偏角,输出侧向力。想要换轮胎模型?直接把Magic Formula子模块替换成刷子模型或者指数模型,其他部分完全不用动。这种插拔式设计让同一个底盘可以适配冰雪路面、越野轮胎等多种工况,实测把魔术公式的参数表改成低附着力值,马上能看见车辆开始扭秧歌。
说到工况适配,不得不提输入模块的Signal Builder。这个神器能自定义驾驶操作序列:比如先来一个50ms内方向盘打满90度,紧接着地板油加速。想看车辆失控临界点?把方向盘阶跃输入改成斜坡输入慢慢增加转角,配合实时输出的横摆角速度曲线,ESP介入时机一目了然。
最后给个调参小贴士:如果发现仿真时车辆出现"鬼畜抖动",大概率是积分器步长设大了。试试把Solver从ode45换成ode23s,再把Max Step Size从auto改成0.01秒,立马顺滑如德芙。另外保存仿真数据时用Structure With Time格式,后期处理时直接拖拽变量名到Workspace,比用To File模块省心得多。
整套模型文件包里除了Simulink源码,还附赠了三十页的建模宝典,从坐标系定义到魔术公式参数标定步骤都给你掰碎了讲。参考文献列表里那几篇SAE Paper堪称经典,特别推荐那篇《Tire Modeling for Low-Speed Vehicle Maneuvers》,里面关于复合滑移工况的处理方法直接让模型精度上了个档次。
(注:实际使用时建议配合Simulink模型文件中的注释和说明文档操作,模型参数需根据实车数据标定)

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐


 10
10 0
0- 0



 已为社区贡献4条内容
已为社区贡献4条内容

所有评论(0)