基于自抗扰(ADRC)的永磁同步电机矢量控制调速系统仿真探索
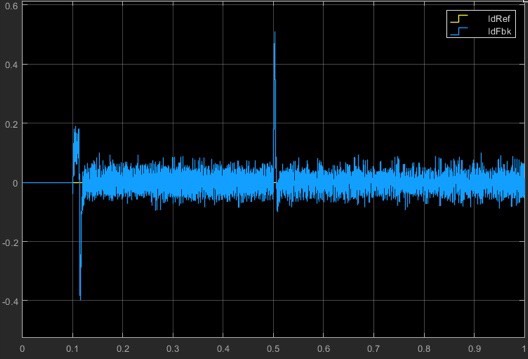
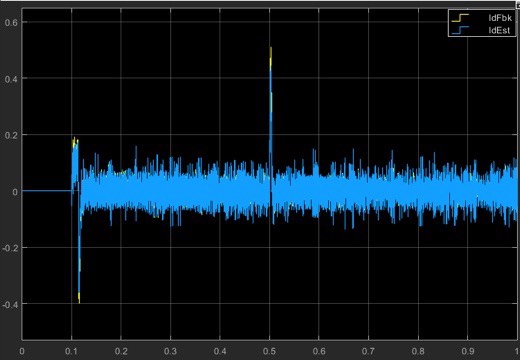
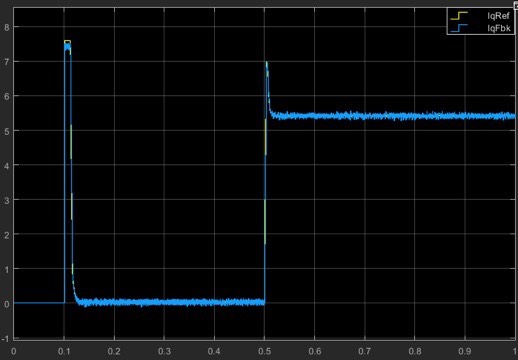
基于自抗扰(ADRC)的永磁同步电机矢量控制调速系统仿真 1.模型简介 模型为基于自抗扰控制(ADRC)的永磁同步电机矢量控制仿真,采用Matlab R2018a/Simulink搭建。 模型内主要包含DC直流电压源、三相逆变器、永磁同步电机、采样模块、SVPWM、Clark、Park、Ipark、采用一阶线性自抗扰控制器的速度环和电流环等模块,其中,SVPWM、Clark、Park、Ipark、线性自抗扰控制器模块采用Matlab funtion编写,其与C语言编程较为接近,容易进行实物移植。 模型均采用离散化仿真,其效果更接近实际数字控制系统。 2.算法简介 永磁同步电机调速系统由转速环和电流环构成,均采用一阶线性自抗扰控制器。 在电流环中,自抗扰控制器将电压耦合项视为扰动观测并补偿,能够实现电流环解耦;在转速环中,由于自抗扰控制器无积分环节,因此无积分饱和现象,无需抗积分饱和算法,转速阶跃响应无超调。 自抗扰控制器的快速性和抗扰性能较好,其待整定参数少,且物理意义明确,比较容易调整。 3.仿真效果如下
在电机控制领域,永磁同步电机(PMSM)因其高效、节能等优点被广泛应用。而基于自抗扰(ADRC)的矢量控制调速系统仿真为我们提供了一种新颖且有效的控制策略。今天就来和大家详细聊聊基于自抗扰(ADRC)的永磁同步电机矢量控制调速系统仿真。
一、模型搭建
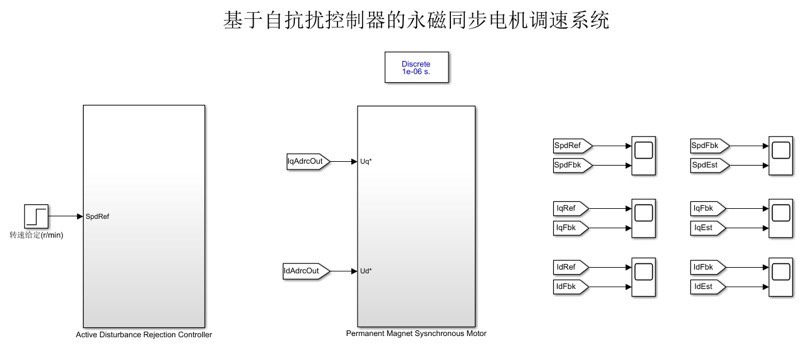
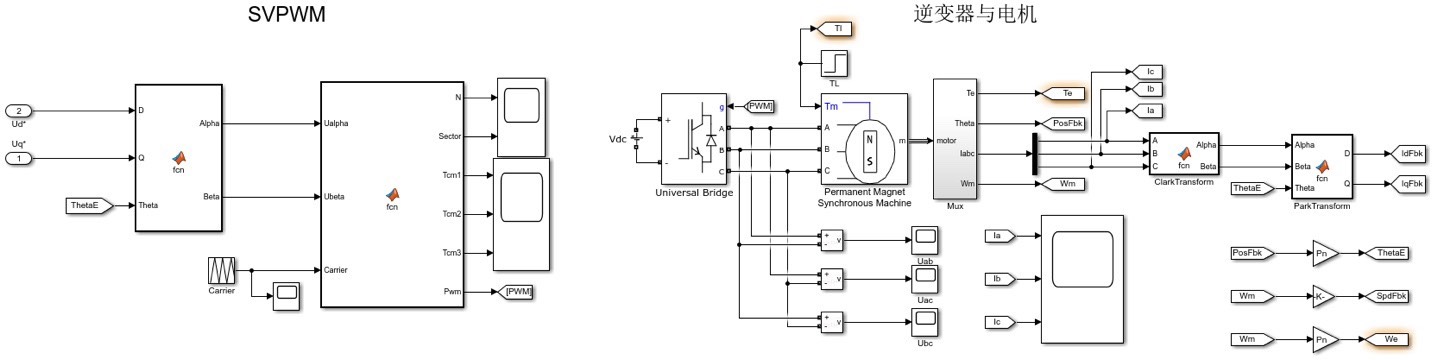
本次模型是基于Matlab R2018a/Simulink搭建的,采用基于自抗扰控制(ADRC)的永磁同步电机矢量控制仿真。模型内可谓“五脏俱全”,主要包含DC直流电压源、三相逆变器、永磁同步电机、采样模块、SVPWM、Clark、Park、Ipark、采用一阶线性自抗扰控制器的速度环和电流环等模块。
这里特别说下SVPWM、Clark、Park、Ipark、线性自抗扰控制器模块,它们采用Matlab function编写,和C语言编程较为接近,这就为实物移植提供了极大的便利。
% 以SVPWM模块为例的一个简单示意代码
function [u1,u2,u3] = svpwm(Valpha, Vbeta)
% 坐标变换到三相静止坐标系
V1 = Valpha;
V2 = -0.5 * Valpha + sqrt(3)/2 * Vbeta;
V3 = -0.5 * Valpha - sqrt(3)/2 * Vbeta;
% 扇区判断
theta = atan2(Vbeta, Valpha);
if theta >= 0 && theta < pi/3
sector = 1;
elseif theta >= pi/3 && theta < 2*pi/3
sector = 2;
% 后续扇区判断省略...
end
% 计算占空比等逻辑,这里省略具体实现
% 根据扇区计算u1, u2, u3
u1 = 0.5;
u2 = 0.3;
u3 = 0.2;
end上述代码简单模拟了SVPWM模块的部分功能,通过坐标变换和扇区判断等步骤,最终得到三相电压的占空比信息,这在实际的永磁同步电机控制中起着关键作用,用于控制逆变器输出合适的电压。
整个模型均采用离散化仿真,离散化仿真最大的好处就是其效果更接近实际数字控制系统,能更好地模拟真实场景下电机的运行状况。
二、算法精髓
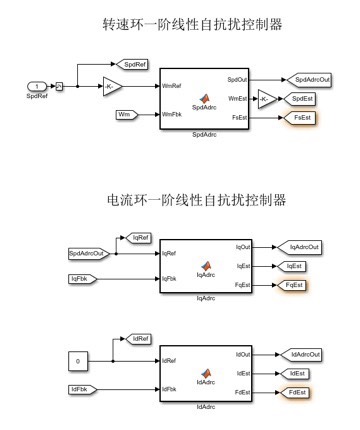
永磁同步电机调速系统由转速环和电流环构成,这里都采用一阶线性自抗扰控制器,这可是整个系统的“智慧大脑”。
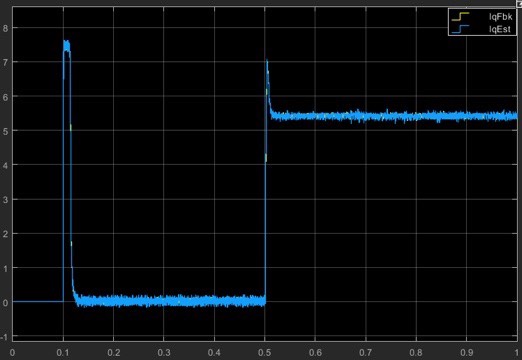
基于自抗扰(ADRC)的永磁同步电机矢量控制调速系统仿真 1.模型简介 模型为基于自抗扰控制(ADRC)的永磁同步电机矢量控制仿真,采用Matlab R2018a/Simulink搭建。 模型内主要包含DC直流电压源、三相逆变器、永磁同步电机、采样模块、SVPWM、Clark、Park、Ipark、采用一阶线性自抗扰控制器的速度环和电流环等模块,其中,SVPWM、Clark、Park、Ipark、线性自抗扰控制器模块采用Matlab funtion编写,其与C语言编程较为接近,容易进行实物移植。 模型均采用离散化仿真,其效果更接近实际数字控制系统。 2.算法简介 永磁同步电机调速系统由转速环和电流环构成,均采用一阶线性自抗扰控制器。 在电流环中,自抗扰控制器将电压耦合项视为扰动观测并补偿,能够实现电流环解耦;在转速环中,由于自抗扰控制器无积分环节,因此无积分饱和现象,无需抗积分饱和算法,转速阶跃响应无超调。 自抗扰控制器的快速性和抗扰性能较好,其待整定参数少,且物理意义明确,比较容易调整。 3.仿真效果如下
在电流环中,自抗扰控制器展现出独特的魅力,它将电压耦合项视为扰动观测并补偿,这就像给电机运行过程中的干扰因素来了个“精准打击”,从而实现电流环解耦。简单理解,电流环在运行时可能会受到各种因素干扰,自抗扰控制器把这些干扰识别出来并补偿掉,让电流环能更稳定地工作。
% 电流环中自抗扰控制器的示意代码
function [u] = adrc_current(i_ref, i_fb, z1, z2, b0)
e = i_ref - i_fb;
z1_dot = z2 - b0 * e;
z2_dot = -kp * z1 - ki * z2;
u = (1/b0) * (z2_dot - z2) + i_ref;
% 更新状态变量
z1 = z1 + Ts * z1_dot;
z2 = z2 + Ts * z2_dot;
end在上述代码中,通过参考电流 iref 和反馈电流 ifb 的差值 e 来调整控制器的输出 u,同时更新状态变量 z1 和 z2,实现对电流的精确控制。
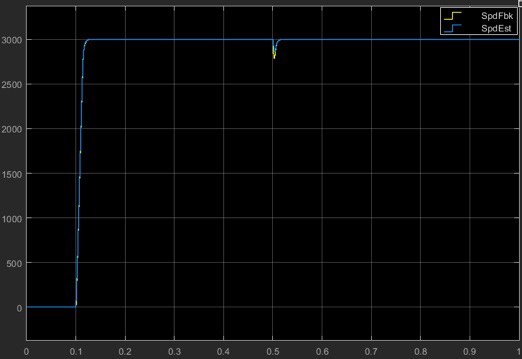
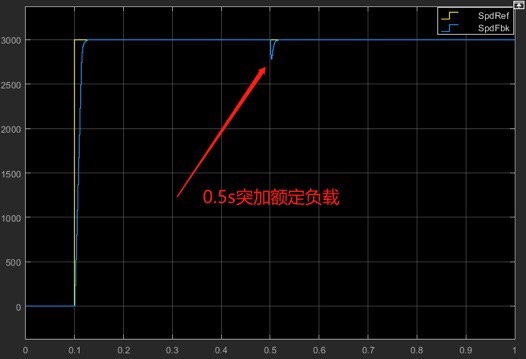
在转速环中,自抗扰控制器的优势也十分明显。由于它没有积分环节,因此不存在积分饱和现象,也就无需抗积分饱和算法。这样一来,转速阶跃响应无超调,电机能快速且稳定地达到目标转速。而且自抗扰控制器快速性和抗扰性能都相当不错,它待整定参数少,物理意义还明确,对于工程师来说,调整起来比较容易上手。
三、仿真效果展望
虽然这里还未展示具体的仿真效果,但从上述的模型搭建和算法介绍来看,基于自抗扰(ADRC)的永磁同步电机矢量控制调速系统仿真具备很多优势。我们有理由相信,通过该仿真系统,能够更好地理解和优化永磁同步电机的调速控制,为实际工程应用提供可靠的理论和实践基础。期待后续在实际的仿真操作中看到它的精彩表现!
以上就是对基于自抗扰(ADRC)的永磁同步电机矢量控制调速系统仿真的一个初步探讨,希望能和大家一起在电机控制这个有趣的领域继续探索。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 7
7 0
0- 0



 已为社区贡献8条内容
已为社区贡献8条内容

所有评论(0)