基于Matlab/Simulink搭建14自由度整车模型:开启多工况模拟新体验
软件使用:Matlab/Simulink 适用场景:采用模块化建模方法,搭建14自由度整车模型,作为整车平台适用于多种工况场景。 产品simulink源码包含如下模块: 工况: 阶跃工况 包含模块:转向系统(支持四转向四驱动),整车系统,悬架系统,魔术轮胎,车轮系统,PI驾驶员控制模块等 十四自由度包含:整车纵向,横向,横摆,车身俯仰,侧倾,垂向跳动,车轮的四轮旋转和垂向自由度,每个自由度的数据都可在simulink当中实时查看。 包含:simulink源码文件,详细建模说明文档,对应参考资料及相关文献
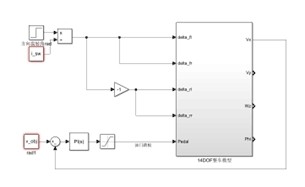
在汽车工程和动力学研究领域,精确的整车模型搭建对于模拟各种工况、优化车辆性能至关重要。今天就来跟大家分享一下如何借助Matlab/Simulink这一强大工具,采用模块化建模方法搭建14自由度整车模型,此模型堪称一个“整车平台”,能适应多种工况场景。
一、适用场景概述
我们搭建的这个14自由度整车模型可不是“花瓶”,它能在众多工况场景中发挥作用。通过模块化建模,就像搭建乐高积木一样,将各个关键部分有机组合。从复杂的动力学模拟到实际驾驶场景的仿真,它都能大显身手。
二、Simulink源码模块剖析
1. 工况 - 阶跃工况
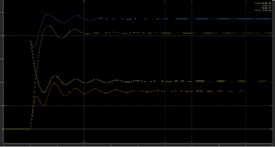
阶跃工况在整车模拟中十分关键,它能模拟车辆行驶过程中突然变化的情况,比如突然加速、转向等动作。就像实际驾驶中,驾驶员突然踩下油门或者猛打方向盘的瞬间。
2. 转向系统(支持四转向四驱动)
% 简单示意转向系统的部分逻辑
function steering_angle = calculate_steering_angle(input_signal)
% 假设input_signal是来自驾驶员操作的信号
% 根据特定算法计算转向角度
steering_angle = input_signal * 0.5;
% 这里简单乘以0.5,实际可能涉及复杂的动力学计算
end这段代码模拟了转向系统根据输入信号计算转向角度的过程。在实际的Simulink模型中,这个模块会与整车系统、悬架系统等紧密配合,实现车辆精确转向。四转向四驱动使得车辆在转向操控性上更具灵活性,能应对复杂路况和特殊驾驶需求。
3. 整车系统
整车系统如同整个模型的“大脑”,协调各个子系统之间的工作。它整合了来自转向系统、悬架系统等的信息,综合计算车辆的整体运动状态。
4. 悬架系统
悬架系统关乎车辆的舒适性和操控稳定性。在Simulink模型中,它模拟真实悬架的力学特性。
% 简单的悬架垂直力计算
function vertical_force = calculate_suspension_vertical_force(spring_constant, displacement)
vertical_force = spring_constant * displacement;
% 根据胡克定律,计算悬架垂直力
end这里通过简单的胡克定律计算悬架垂直力,实际模型中还会考虑阻尼等更多因素。
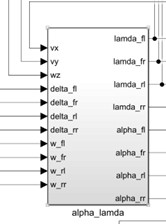
5. 魔术轮胎
魔术轮胎模型是整车模型的关键部分,它精确模拟轮胎与地面的相互作用。通过复杂的算法,能准确反映轮胎在不同工况下的力和力矩特性。
6. 车轮系统
车轮系统直接影响车辆的行驶。它与悬架、整车系统协同工作,传递动力和制动力。
% 车轮转速计算
function wheel_speed = calculate_wheel_speed(engine_speed, gear_ratio)
wheel_speed = engine_speed / gear_ratio;
% 根据发动机转速和传动比计算车轮转速
end7. PI驾驶员控制模块
PI驾驶员控制模块模拟驾驶员的操作。它根据车辆当前状态和目标状态,通过比例 - 积分(PI)控制算法调整车辆的控制输入,例如油门开度、转向角度等。
% 简单的PI控制算法示意
function control_signal = pi_control(error, kp, ki, integral)
p_term = kp * error;
integral = integral + error;
i_term = ki * integral;
control_signal = p_term + i_term;
% 根据误差计算控制信号
end三、14自由度的奥秘
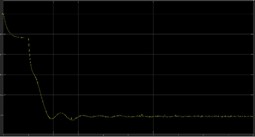
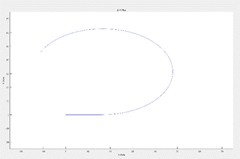
这14个自由度分别为整车纵向、横向、横摆、车身俯仰、侧倾、垂向跳动,车轮的四轮旋转和垂向自由度。每个自由度的数据都能在Simulink当中实时查看,这就像是给整车模型安装了无数个“监测器”。
软件使用:Matlab/Simulink 适用场景:采用模块化建模方法,搭建14自由度整车模型,作为整车平台适用于多种工况场景。 产品simulink源码包含如下模块: 工况: 阶跃工况 包含模块:转向系统(支持四转向四驱动),整车系统,悬架系统,魔术轮胎,车轮系统,PI驾驶员控制模块等 十四自由度包含:整车纵向,横向,横摆,车身俯仰,侧倾,垂向跳动,车轮的四轮旋转和垂向自由度,每个自由度的数据都可在simulink当中实时查看。 包含:simulink源码文件,详细建模说明文档,对应参考资料及相关文献
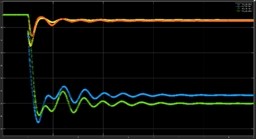
比如在模拟车辆高速行驶突然转向时,通过实时查看横向和横摆自由度的数据,就能直观了解车辆的响应特性,是否会出现侧滑等危险情况。这种实时数据查看功能,方便我们对模型进行调试和优化,不断提升模型的准确性。
四、资料支持
我们提供了Simulink源码文件,方便大家深入研究模型的内部结构和逻辑。同时还有详细建模说明文档,从模型搭建思路到每个模块的具体实现,都有详细介绍,就像一本“说明书”,帮助大家快速上手。另外,对应参考资料及相关文献也一并提供,这些资料能让大家站在巨人的肩膀上,深入理解车辆动力学、建模理论等知识,为进一步优化模型提供理论支撑。
希望通过以上分享,大家对基于Matlab/Simulink搭建14自由度整车模型有更清晰的认识,也期待大家在这个模型基础上开展更多有趣且有价值的研究。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐


 2
2 0
0- 0



 已为社区贡献9条内容
已为社区贡献9条内容

所有评论(0)