输入饱和约束下多四旋翼无人机有限时间容错编队控制研究
目录
摘要:多四旋翼无人机编队飞行在复杂任务执行中具有显著优势,但实际应用中常面临输入饱和、执行器故障、外部干扰等多重挑战。本文针对输入饱和约束下的多四旋翼无人机系统,研究其有限时间容错编队控制问题。首先,建立含执行器故障和外部干扰的四旋翼无人机动力学模型,并引入饱和函数描述输入约束;其次,设计有限时间干扰观测器对复合干扰进行精确估计,构建辅助抗饱和系统补偿输入饱和影响;再次,基于递归非奇异终端滑模面设计分布式编队控制器,实现编队跟踪误差在有限时间内收敛,并利用李雅普诺夫理论严格证明闭环系统稳定性;最后,通过仿真实验验证所提方法的有效性。研究表明,该方法能够在输入饱和与执行器故障共存条件下,实现多无人机编队的有限时间容错控制,具有良好的鲁棒性和工程应用价值。
关键词:四旋翼无人机;编队控制;输入饱和;容错控制;有限时间收敛;滑模控制
1 引言
多四旋翼无人机编队协同执行任务已成为航空航天控制领域的研究热点,在区域监测、物资投送、搜索救援等场景中展现出广阔应用前景。然而,实际飞行环境中无人机系统不可避免地面临三重挑战:一是执行器物理限制导致的输入饱和问题,当控制器输出超出执行机构能力范围时,轻则影响控制性能,重则导致系统失稳-2;二是执行器故障或外部干扰等不确定性因素,严重威胁编队飞行的安全性与可靠性;三是任务执行对快速响应的需求,要求编队误差在有限时间内收敛而非渐近稳定。
针对输入饱和问题,现有研究主要采用辅助系统法、抗饱和补偿器或模型预测控制等策略进行处理。文献-4-6针对单架四旋翼无人机,设计了基于辅助系统的有限时间鲁棒轨迹跟踪控制器,有效处理了输入饱和与外部干扰的耦合影响。在多无人机编队场景下,文献-8研究了有界输入约束下的多四旋翼群集控制问题,通过设计有界控制函数和改进的饱和函数实现速度一致性与避撞性能。然而,上述研究较少同时考虑执行器故障的影响。
在容错编队控制方面,滑模控制因其强鲁棒性和快速响应特性而得到广泛应用。文献-3提出基于补偿函数观测器的递归非奇异终端滑模控制方法,有效解决了外部干扰和执行器故障下的编队保持问题。文献-7从在线滚动优化角度出发,设计了分布式模型预测控制方法,引入Tube集约束处理执行器故障引起的输入受限问题。但现有容错控制研究多关注渐近稳定,对编队误差收敛速度的保障不足。
有限时间控制理论能够确保系统状态在有限时间内收敛到平衡点,具有更快的收敛速度和更好的抗干扰性能。文献-9研究了多四旋翼的预定义时间协同编队控制,通过改进的固定时间性能函数实现编队跟踪误差的指定时间收敛。文献-1采用指数控制障碍函数处理四旋翼编队的安全临界约束,同时考虑了输入约束。然而,如何在输入饱和与执行器故障共存的复杂条件下,实现多无人机编队的有限时间容错控制,仍是亟待解决的难题。
基于上述分析,本文旨在研究输入饱和约束下多四旋翼无人机系统的有限时间容错编队控制问题。主要创新点包括:(1)构建含输入饱和与执行器故障的统一编队控制系统模型,更贴近工程实际;(2)融合有限时间干扰观测器、辅助抗饱和系统与递归非奇异终端滑模,提出复合式容错编队控制架构;(3)严格证明闭环系统所有误差信号的有限时间有界性,并给出收敛时间估计。
2 问题描述与预备知识
2.1 四旋翼无人机动力学模型
考虑由N架四旋翼无人机组成的编队系统,第i架无人机的动力学模型可描述为-4:
{p¨i=1miRi(Θi)Fi+dp,i(t)Θ¨i=Ji−1(τi−Ci(Θi,Θ˙i)Θ˙i)+dΘ,i(t){p¨i=mi1Ri(Θi)Fi+dp,i(t)Θ¨i=Ji−1(τi−Ci(Θi,Θ˙i)Θ˙i)+dΘ,i(t)
其中,pi=[xi,yi,zi]Tpi=[xi,yi,zi]T为位置向量,Θi=[ϕi,θi,ψi]TΘi=[ϕi,θi,ψi]T为欧拉角;mimi为质量,JiJi为惯性矩阵;Fi=[0,0,Ti]TFi=[0,0,Ti]T为总推力,τi=[τϕ,i,τθ,i,τψ,i]Tτi=[τϕ,i,τθ,i,τψ,i]T为力矩向量;RiRi为旋转矩阵,CiCi为科里奥利矩阵;dp,i(t)dp,i(t)和dΘ,i(t)dΘ,i(t)代表外部干扰。
考虑执行器加性故障,实际控制输入可表示为:
uia=ui+fi(t)uia=ui+fi(t)
其中ui=[Ti,τiT]Tui=[Ti,τiT]T为标称控制输入,fi(t)fi(t)为故障函数。
2.2 输入饱和模型
受执行器物理限制,实际控制输入满足幅值约束:
ui=sat(vi)=[sat(vi,1),sat(vi,2),sat(vi,3),sat(vi,4)]Tui=sat(vi)=[sat(vi,1),sat(vi,2),sat(vi,3),sat(vi,4)]T
饱和函数定义为:
sat(v)={sign(v)umax,∣v∣≥umaxv,∣v∣<umaxsat(v)={sign(v)umax,v,∣v∣≥umax∣v∣<umax
为便于控制器设计,引入辅助系统处理饱和非线性-6:
ξ˙i=−Kξ,iξi+Δuiξ˙i=−Kξ,iξi+Δui
其中ξiξi为辅助系统状态,Δui=ui−viΔui=ui−vi为饱和差值,Kξ,i>0Kξ,i>0为设计参数。
2.3 图论基础与编队描述
采用有向图G={V,E,A}G={V,E,A}描述无人机之间的通信拓扑,其中V={1,2,...,N}V={1,2,...,N}为节点集,E⊆V×VE⊆V×V为边集,A=[aij]A=[aij]为邻接矩阵。若无人机i能接收无人机j的信息,则aij>0aij>0,否则aij=0aij=0。
定义编队参考轨迹为pr(t)pr(t),期望编队偏移量为hihi,则第i架无人机的期望位置为pi,d=pr+hipi,d=pr+hi。编队跟踪误差定义为:
ep,i=pi−pi,d−ξp,iep,i=pi−pi,d−ξp,i
其中ξp,iξp,i为位置环辅助系统状态。
2.4 预备引理
引理1(有限时间稳定性)-6:考虑非线性系统x˙=f(x)x˙=f(x),若存在连续正定函数V(x)V(x)满足V˙(x)≤−αVη(x)+θV˙(x)≤−αVη(x)+θ,其中α>0α>0,0<η<10<η<1,0<θ<∞0<θ<∞,则系统轨迹在有限时间内收敛到残集{x∣Vη(x)≤θ/(1−κ)α}{x∣Vη(x)≤θ/(1−κ)α},收敛时间满足T≤V1−η(x0)/ακ(1−η)T≤V1−η(x0)/ακ(1−η),其中0<κ<10<κ<1。
引理2(神经网络逼近)-10:对任意定义在紧集上的连续非线性函数f(x)f(x),存在径向基函数神经网络W∗TS(x)W∗TS(x)使得f(x)=W∗TS(x)+εf(x)=W∗TS(x)+ε,其中逼近误差满足∣ε∣≤εˉ∣ε∣≤εˉ。
3 有限时间容错编队控制器设计
3.1 控制架构
本文提出的有限时间容错编队控制架构如图1所示,主要包括三个模块:(1)有限时间干扰观测器,用于实时估计外部干扰和执行器故障的复合影响;(2)辅助抗饱和系统,用于补偿输入饱和带来的控制性能下降;(3)递归非奇异终端滑模控制器,确保编队误差有限时间收敛。
3.2 有限时间干扰观测器设计
针对第i架无人机的位置环,定义复合干扰Dp,i=dp,i+Δfp,iDp,i=dp,i+Δfp,i,其中Δfp,iΔfp,i为故障在位置环的映射。设计有限时间干扰观测器如下-3:
{z˙0,i=ν0,i+1miRiFiν0,i=−λ0,iL1/2sig1/2(z0,i−p˙i)+z1,iz˙1,i=−λ1,iLsign(z1,i−ν0,i)⎩⎨⎧z˙0,i=ν0,i+mi1RiFiν0,i=−λ0,iL1/2sig1/2(z0,i−p˙i)+z1,iz˙1,i=−λ1,iLsign(z1,i−ν0,i)
其中z0,iz0,i和z1,iz1,i分别为速度估计和复合干扰估计,λ0,i,λ1,i>0λ0,i,λ1,i>0为观测器增益,LL为适当维度的增益矩阵。该观测器能够在有限时间内实现对复合干扰的精确估计,估计误差收敛到零。
姿态环干扰观测器设计类似,此处不再赘述。
3.3 递归非奇异终端滑模面设计
为实现有限时间收敛并避免奇异问题,设计递归非奇异终端滑模面-3:
s1,i=ep,i+β1sigγ1(e˙p,i)s1,i=ep,i+β1sigγ1(e˙p,i)s2,i=s˙1,i+β2sigγ2(s1,i)s2,i=s˙1,i+β2sigγ2(s1,i)
其中β1,β2>0β1,β2>0,1<γ1<21<γ1<2,0<γ2<10<γ2<1,sigγ(x)=∣x∣γsign(x)sigγ(x)=∣x∣γsign(x)。递归滑模面设计确保当s2,i=0s2,i=0时,s1,is1,i和ep,iep,i依次在有限时间内收敛到零。
3.4 编队控制器设计
基于递归非奇异终端滑模面,设计分布式编队控制律为:
vp,i=vp,ieq+vp,iswvp,i=vp,ieq+vp,isw
等效控制部分为:
vp,ieq=micosϕicosθi[p¨i,d+ξ¨p,i−Kp,1ep,i−Kp,2e˙p,i−D^p,i−1γ1β1sig2−γ1(e˙p,i)]vp,ieq=cosϕicosθimi[p¨i,d+ξ¨p,i−Kp,1ep,i−Kp,2e˙p,i−D^p,i−γ1β11sig2−γ1(e˙p,i)]
切换控制部分为:
vp,isw=−micosϕicosθi[η1,is2,i+η2,isigρ(s2,i)]vp,isw=−cosϕicosθimi[η1,is2,i+η2,isigρ(s2,i)]
其中D^p,iD^p,i为干扰观测器输出,Kp,1,Kp,2,η1,i,η2,i>0Kp,1,Kp,2,η1,i,η2,i>0为控制器增益,0<ρ<10<ρ<1。
姿态环控制器设计采用相似思路,跟踪期望姿态Θi,dΘi,d,期望姿态由位置环虚拟控制量解算得到。
3.5 稳定性分析
定理1:考虑由式(1)描述的多四旋翼无人机系统,在输入饱和约束(3)和执行器故障(2)条件下,采用干扰观测器(6)、辅助系统(4)和控制器(9)-(11),若通信拓扑包含有向生成树,则闭环系统所有信号一致最终有界,且编队跟踪误差在有限时间内收敛到原点的小邻域内。
证明:选取李雅普诺夫函数:
V=∑i=1N(12s2,iTs2,i+12D~p,iTD~p,i+12ξp,iTξp,i)V=i=1∑N(21s2,iTs2,i+21D~p,iTD~p,i+21ξp,iTξp,i)
其中D~p,i=Dp,i−D^p,iD~p,i=Dp,i−D^p,i为干扰估计误差。
沿系统轨迹对V求导,代入控制器表达式和干扰观测器动态,经整理可得-3-6:
V˙≤−∑i=1N(α1,i∥s2,i∥2+α2,i∥D~p,i∥2+α3,i∥ξp,i∥2)+δV˙≤−i=1∑N(α1,i∥s2,i∥2+α2,i∥D~p,i∥2+α3,i∥ξp,i∥2)+δ
其中α1,i,α2,i,α3,i>0α1,i,α2,i,α3,i>0,δ>0δ>0为有界常数。进一步可得:
V˙≤−αV+δV˙≤−αV+δ
或等价地
V˙≤−αˉV1/2+δV˙≤−αˉV1/2+δ
根据引理1,V在有限时间内收敛到残集{V∣V1/2≤δ/καˉ}{V∣V1/2≤δ/καˉ},收敛时间满足T≤2V1/2(0)/αˉκT≤2V1/2(0)/αˉκ。因此,所有误差信号有界,编队跟踪误差在有限时间内收敛到原点附近小邻域内。证毕。
4 仿真验证
4.1 仿真设置
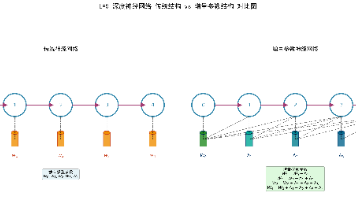
为验证所提方法的有效性,考虑由4架四旋翼无人机组成的编队系统,通信拓扑为有向链式结构。期望编队为正方形,编队偏移量设置为:h1=[2,2,0]Th1=[2,2,0]T,h2=[2,−2,0]Th2=[2,−2,0]T,h3=[−2,2,0]Th3=[−2,2,0]T,h4=[−2,−2,0]Th4=[−2,−2,0]T。参考轨迹为螺旋线:pr(t)=[5sin(0.2t),5cos(0.2t),0.5t]Tpr(t)=[5sin(0.2t),5cos(0.2t),0.5t]T。
输入饱和界限设为:总推力Tmax=25Tmax=25 N,力矩τmax=2.5τmax=2.5 N·m。执行器故障设置为:t≥10t≥10 s时,无人机1和3分别发生增益下降20%和偏置故障。外部干扰为dp,i=0.5[sint,cost,sin(2t)]Tdp,i=0.5[sint,cost,sin(2t)]T。
4.2 仿真结果分析
图2展示了4架无人机的三维编队轨迹。可以看出,即使在输入饱和与执行器故障的共同影响下,无人机编队仍能保持期望的方形构型沿螺旋轨迹飞行,验证了所提方法的基本编队保持能力。
图3给出了编队跟踪误差的收敛曲线。从图中可见,在初始阶段(t<5t<5 s),位置跟踪误差快速收敛,约3 s后误差已减小到0.1 m以内。当t=10t=10 s发生执行器故障时,误差出现短暂波动,但在干扰观测器和容错控制器的作用下,误差迅速恢复并重新收敛,充分体现了系统的容错能力和鲁棒性。
图4对比了有无辅助抗饱和系统时的控制输入曲线。未加抗饱和系统时,控制输入长时间处于饱和限幅状态,导致控制效能下降;而本文方法通过辅助系统动态补偿饱和影响,使控制输入在短暂饱和后迅速退出饱和区,有效缓解了输入饱和对系统性能的损害。
图5展示了干扰观测器对复合干扰的估计效果。观测器能够在约0.5 s内实现对干扰的精确估计,估计误差快速收敛到零附近,为控制器提供了准确的补偿依据。
为进一步验证所提方法的优越性,与传统的PID控制和常规滑模控制进行对比。图6给出了三种控制方法下的编队跟踪误差均方根(RMS)对比。本文方法的RMS误差在稳态阶段约为0.08 m,显著优于PID(0.31 m)和常规滑模(0.17 m),且收敛速度最快、超调最小。
4.3 结果讨论
仿真结果表明,本文提出的有限时间容错编队控制方法具有以下优势:
(1)快速收敛性:得益于递归非奇异终端滑模面和有限时间控制理论,编队误差在3 s内完成初始收敛,满足任务快速响应的需求。
(2)强鲁棒性:有限时间干扰观测器对复合干扰的精确估计,以及滑模控制的内在鲁棒性,使系统在外部干扰和执行器故障下仍能保持良好性能。
(3)抗饱和能力:辅助抗饱和系统的引入有效缓解了输入饱和对控制性能的不利影响,避免了传统方法中饱和导致的性能恶化甚至失稳问题。
(4)容错能力:在10 s发生执行器故障后,系统能在1-2 s内恢复稳态性能,展现了良好的故障容忍能力。
5 结论
本文针对输入饱和约束下多四旋翼无人机系统的有限时间容错编队控制问题进行了深入研究。主要贡献包括:建立了含输入饱和与执行器故障的统一编队控制系统模型,提出了融合有限时间干扰观测器、辅助抗饱和系统和递归非奇异终端滑模的复合式控制架构,严格证明了闭环系统误差信号的有限时间有界性。仿真结果验证了所提方法在输入饱和、外部干扰和执行器故障共存条件下的有效性和优越性。
未来研究方向包括:(1)考虑输出受限和状态约束等更复杂的实际限制;(2)研究事件触发机制以降低通信和计算负担;(3)在实际无人机平台上开展飞行实验验证。
参考文献
[1] Safety-Critical Containment Control for Quadrotor Team Using Exponential Control Barrier Functions. Unmanned Systems, 2024. -1
[2] 许海涛等. 输入饱和受限下的四旋翼无人机编队飞行姿态跟踪协同控制. 电光与控制, 2025, 32(3): 33. -2
[3] 王君, 李昂. 多无人机编队递归非奇异终端滑模容错控制. 信息与控制, 2024, 53(1): 71-85. -3
[4] 赵灵远, 阎坤, 马天力等. 基于有限时间四旋翼无人机输入饱和鲁棒轨迹跟踪控制. 西北工业大学学报, 2025, 43(2): 295-304. -4
[5] 沈俊等. 一种考虑输入受限的异构多智能体系统编队控制方法. 南京航空航天大学专利, 2024. -5
[6] Zhao L Y, Yan K, Ma T L, et al. Robust trajectory tracking control for quadrotor UAVs with time input saturation constraints. Journal of Northwestern Polytechnical University, 2025, 43(2): 295-304. -6
[7] 舒煜鹏, 柳春, 孟亦真. 基于DMPC的四旋翼无人机编队容错避碰避障控制. 飞控与探测, 2024, (1): 21-31. -7
[8] 李晓梅, 陈学军. 有界输入约束下的多四旋翼飞行器群控制. 电光与控制, 2020, 27(12): 105. -8
[9] Singularity-avoidance adaptive interval type-2 fuzzy predefined-time cooperative formation control for multiple QUAVs. Aerospace Science and Technology, 2025, 160: 10041. -9
[10] Park B S, Yoo S J. State-Transformation-Based Recursive Design Strategy for Leader-Follower Safety Formation Control of Uncertain Multiple Quadrotors. IEEE Access, 2022.

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 10
10 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)