ABB工业机器人编程基础(一)项目搭建
·
软件安装
下载并安装 RobotStudio 软件,安装完成后启动程序。
创建机器人项目
创建新工作站(Station)。
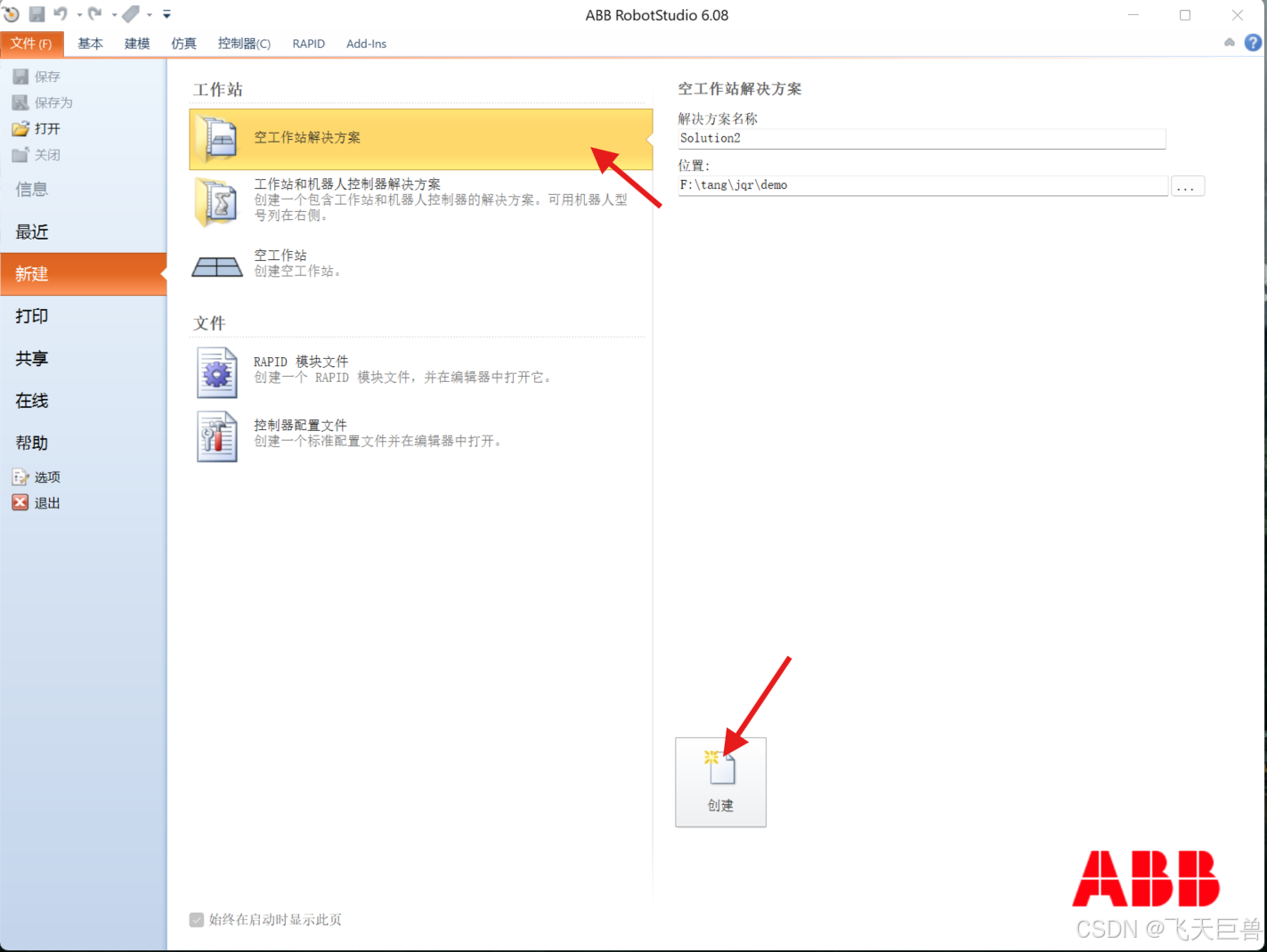
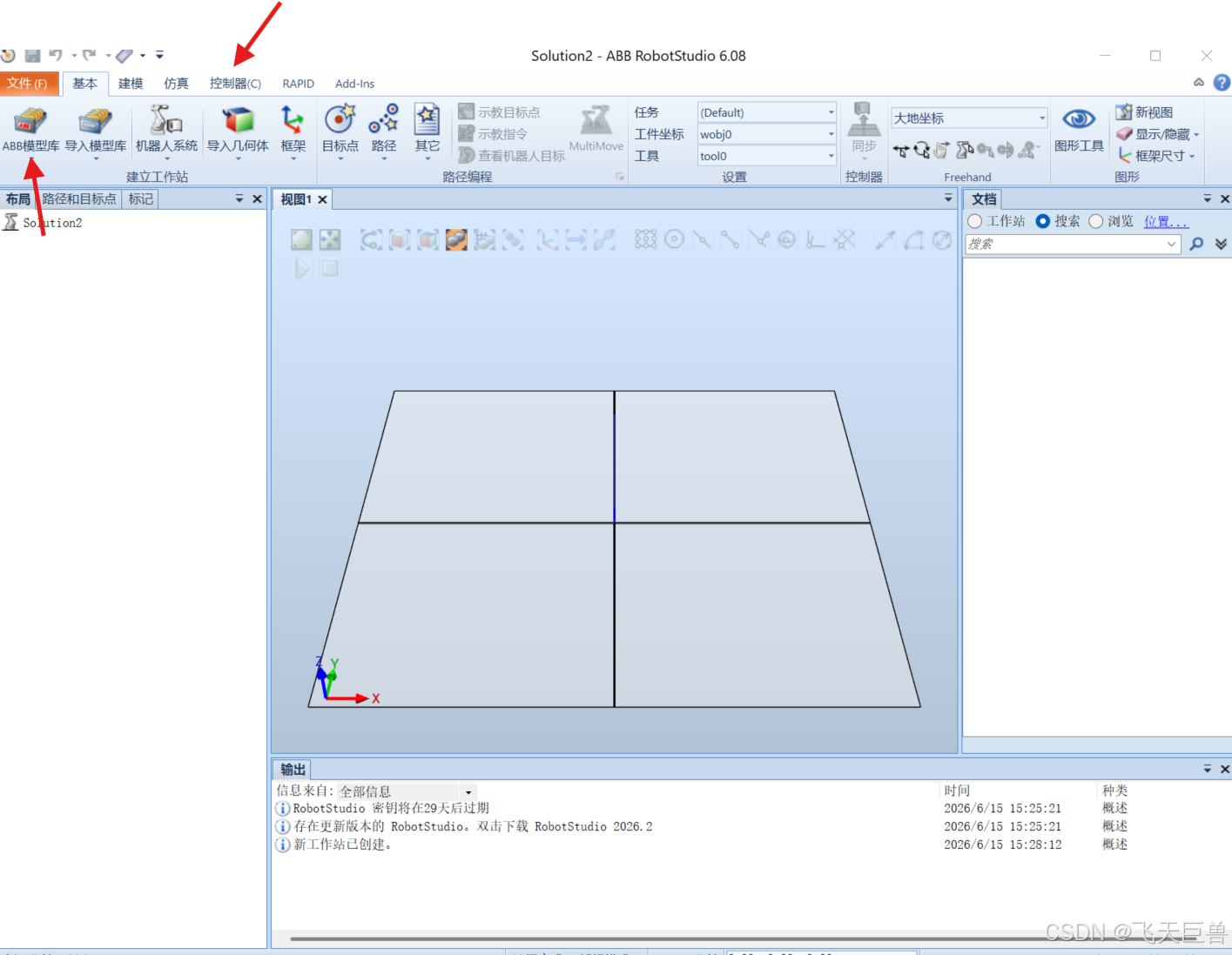
点击顶部菜单栏:
1. 基本 → ABB模型库 → IRB 120
导入 IRB120 机器人模型。
2. 机器人系统 → 从布局创建系统 → 选择 RobotWare → 系统选项选择 Chinese → 完成
创建机器人控制系统。
3. 控制器 → 示教器 → 虚拟示教器
启动虚拟示教器(操作盘)。
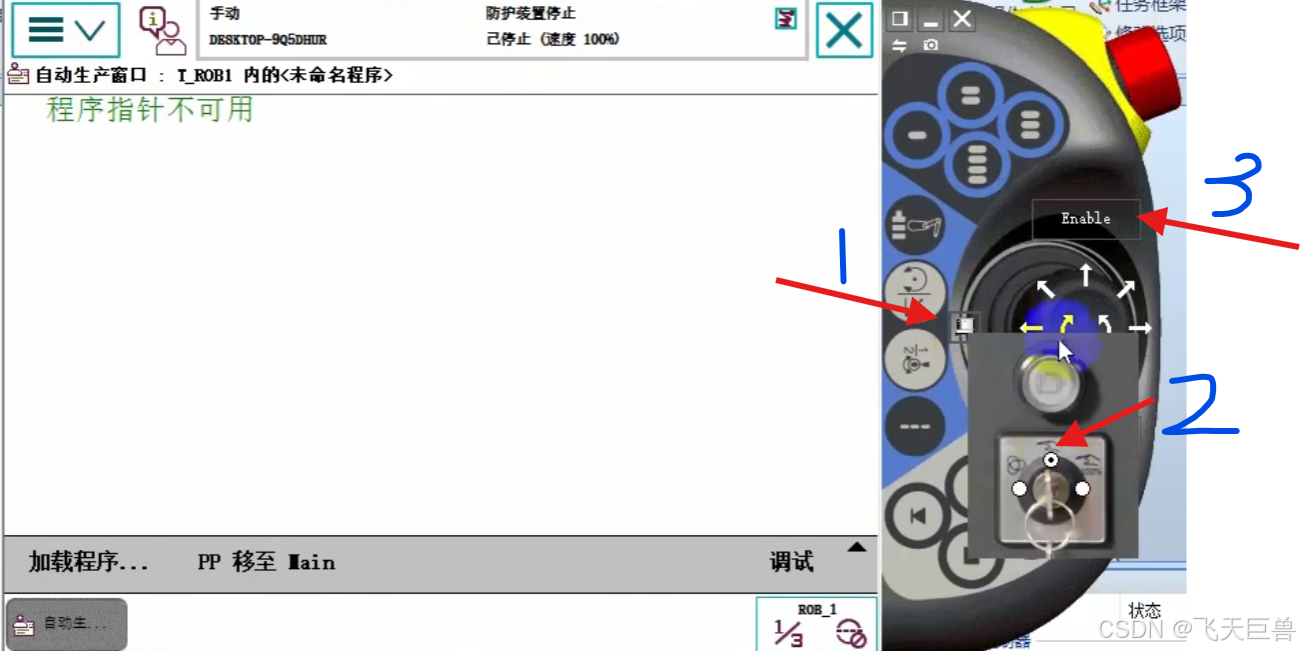
示教器操作
控制面板切换到手动 → 点击 Enable → 开启电机
当状态栏显示“手动”和“电机开启”时,表示机器人已进入可操作状态。
长按轮盘方向键即可控制机器人运动。
视角控制
Ctrl + Shift + 鼠标左键
旋转视角。
Ctrl + 鼠标左键
平移视角。
鼠标滚轮
缩放视角。
总结
本文记录了 RobotStudio 的安装及基础环境搭建过程,包括机器人模型导入、控制系统创建、虚拟示教器启动以及机器人基本操作。通过虚拟控制器可以完成机器人运动仿真和程序调试,为后续学习 RAPID 编程和机器人应用开发提供基础环境。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐



 9
9 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)