混合储能永磁同步电机驱动系统仿真模型机理与特性(Simulink仿真实现)
💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
🎁完整资源、论文复现、期刊合作、论文辅导及科研仿真定制事宜点击:
👉👉👉本文完整资源下载
⛳️座右铭:行百里者,半于九十。
⛳️赠与读者
👨💻做科研,涉及到一个深在的思想系统,需要科研者逻辑缜密,踏实认真,但是不能只是努力,很多时候借力比努力更重要,然后还要有仰望星空的创新点和启发点。建议读者按目录次序逐一浏览,免得骤然跌入幽暗的迷宫找不到来时的路,它不足为你揭示全部问题的答案,但若能解答你胸中升起的一朵朵疑云,也未尝不会酿成晚霞斑斓的别一番景致,万一它给你带来了一场精神世界的苦雨,那就借机洗刷一下原来存放在那儿的“躺平”上的尘埃吧。
或许,雨过云收,神驰的天地更清朗.......🔎🔎🔎
💥第一部分——内容介绍
混合储能永磁同步电机驱动系统仿真模型机理与特性解析
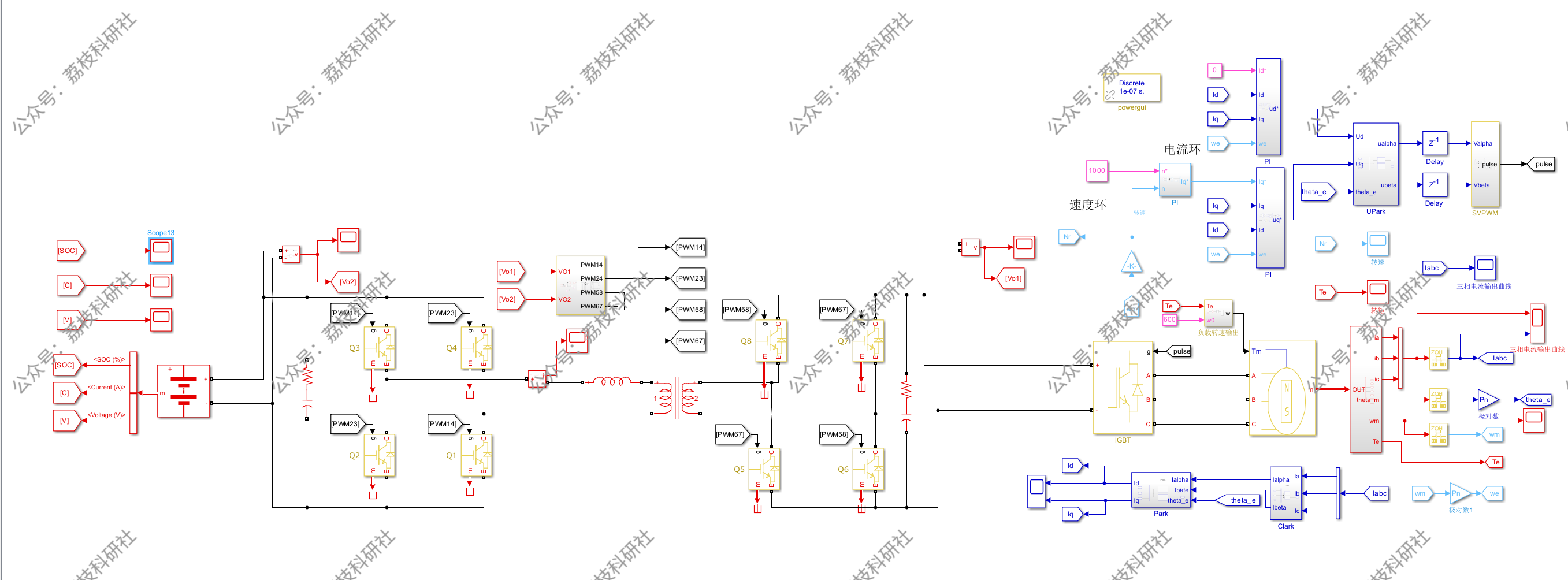
1 系统总体建模框架与工作机理
本文搭建的仿真平台构建了一套完整的锂电池储能、两级隔离DC-DC功率变换、三相逆变电路与永磁同步电机矢量控制一体化驱动系统,精准复刻电动汽车、工业伺服传动等工程场景下的电能双向变换、宽域调速与动态负载适配特性。整体系统采用模块化分层架构设计,自上而下依次划分为储能供电子系统、电力电子变换子系统、永磁同步电机本体子系统与闭环控制调节子系统,各模块功能独立、时序联动,可全面覆盖电机电动牵引、减速制动、负载扰动、能量回馈等典型运行工况,实现四象限稳定运行。
本次仿真采用固定步长离散数值求解方式,统一功率器件开关迭代、控制算法运算、电气信号采样的时序频率,同时引入数字控制系统固有一拍滞后特性,高度还原DSP、FPGA等主流工业控制芯片的实际运行状态,有效规避连续仿真与工程实际脱节的问题。系统具备完整的双向能量流动能力,正向工况下可将储能单元的电能高效转换为电机机械能,反向工况下可将电机制动产生的机械能回收转化为电能存储,大幅提升系统能源利用效率。
为聚焦系统核心控制机理与动态响应特性,本次建模遵循工程简化与精准建模相结合的原则,对功率器件寄生参数、线路杂散阻抗、开关损耗等次要干扰因素进行合理等效简化,完整保留电能变换、电机运行、闭环控制的核心物理与控制特性,既保证仿真模型的可靠性与准确性,又能够直观凸显系统的稳态运行精度、动态响应速度与抗负载扰动能力,为后续工况分析与性能优化提供可靠的模型支撑。
2 锂电池储能单元建模分析
储能单元是整个驱动系统的能量供给与回收核心,其动态输出特性直接影响整机的电压稳定性与工况适配性。本次仿真摒弃了精度较低的理想电压源建模方式,采用工程领域通用的二阶RC等效电路模型,能够精准表征锂电池在不同充放电状态下的欧姆压降、极化响应与非线性电压变化特性,真实还原电池端电压、输出电流、剩余容量的动态耦合规律,贴合实际锂电池的工作特性。
2.1 电池端电压动态特性
锂电池的端电压并非恒定数值,会随充放电电流大小、持续时间与剩余容量呈现显著非线性变化。二阶RC等效模型可精准拆解电池的电压损耗构成,主要包含欧姆内阻分压损耗与极化动态压降两部分。其中,欧姆内阻压降随瞬时充放电电流同步变化,响应速度快;极化压降由电池内部电化学极化效应产生,具备典型的积分滞后特性,会随充放电时长逐步累积或衰减。
电池开路电压是决定端电压输出的核心非线性参数,与电池剩余容量呈现严格的单调对应关系,可通过电池标定实验拟合得到精准特性曲线。在实际运行过程中,系统结合实时剩余容量匹配对应开路电压,叠加内阻与极化电压损耗,最终输出真实的电池端电压,完整复现电池轻载、重载、充电、放电全工况的电压动态变化规律。
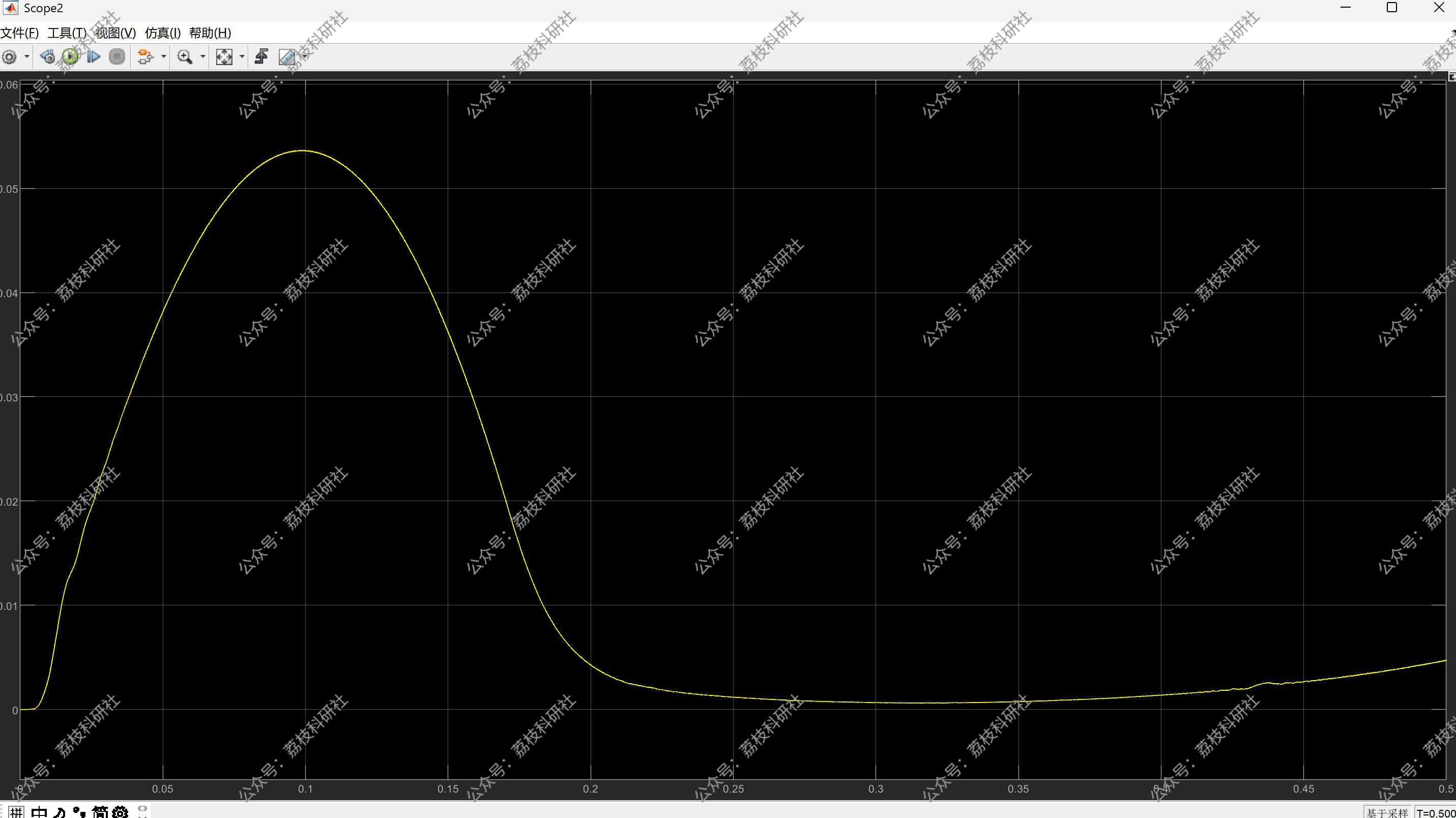
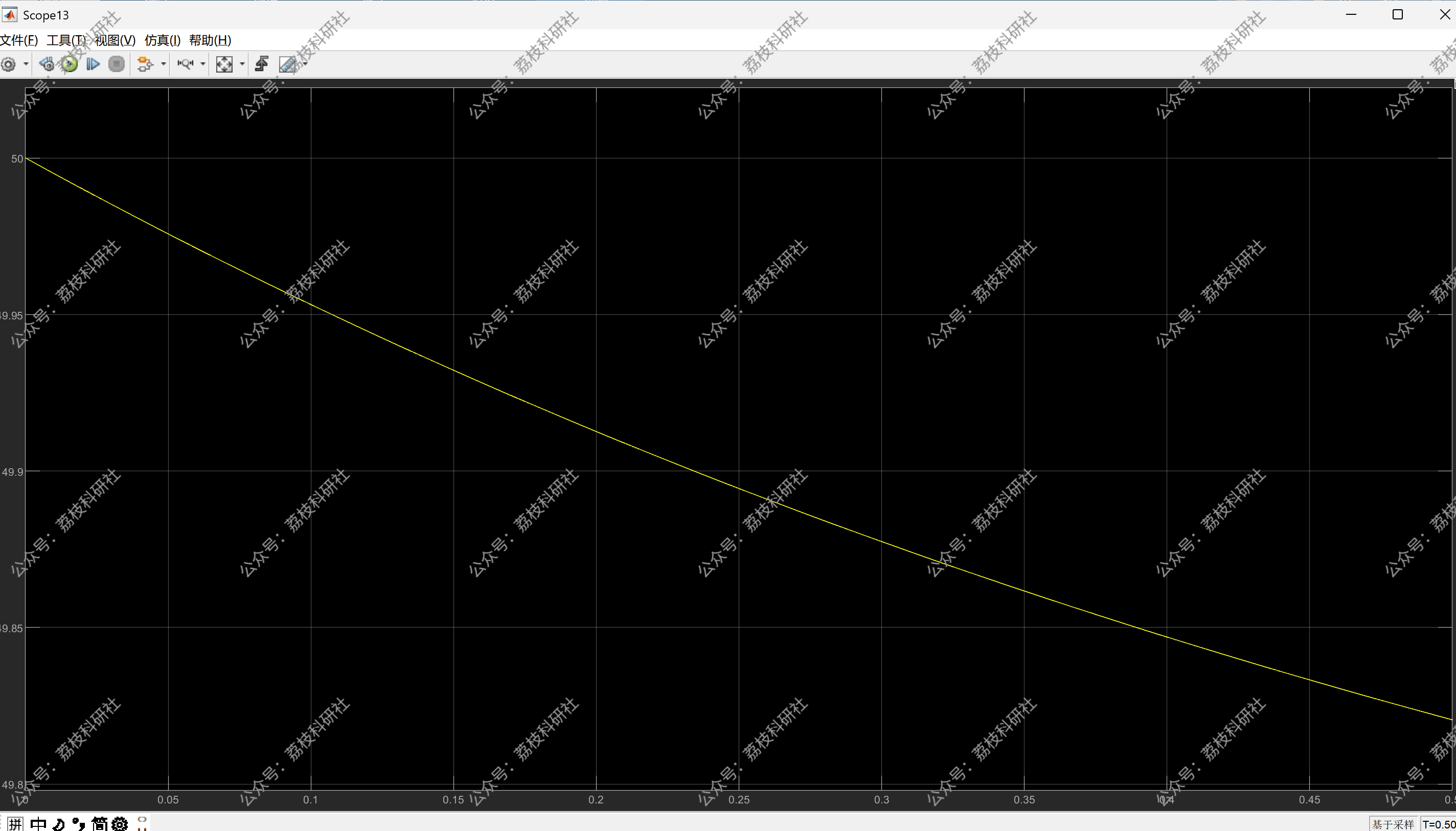
2.2 电池荷电状态动态迭代特性
为精准监测储能系统的能量状态,本次模型采用行业主流的安时积分法实现电池荷电状态的实时迭代更新,是储能系统能量管理与工况判断的核心依据。荷电状态的变化趋势由电池充放电电流的方向与大小决定,具备连续动态更新的特性。
在系统电动运行工况下,电池持续向外放电,输出正向工作电流,荷电状态随放电时长逐步衰减;在制动能量回馈工况下,反向电流流入电池内部,电池处于充电状态,荷电状态小幅回升。该迭代机制能够精准捕捉系统制动能量回收的全过程,清晰反映储能单元的能量消耗与回收规律,为分析系统整体能量利用率、优化能量调度策略提供精准的数据支撑。
3 两级隔离DC-DC功率变换系统建模分析
为适配锂电池宽电压输出特性与永磁同步电机稳定工作的电压需求,同时实现电气安全隔离与双向能量传输,本系统采用“前级双向Buck-Boost变换器+后级双有源桥DAB隔离变换器”的两级DC-DC拓扑架构。前级变换器主要负责电池电压的适配调节,实现宽范围升降压,匹配后级电路工作电压;后级DAB变换器承担电气隔离与母线稳压功能,同时保障能量双向可逆传输,兼顾系统安全性、稳定性与工况适配性。
3.1 前级双向Buck-Boost变换器工作机理
前级双向Buck-Boost变换器采用四管IGBT全桥拓扑结构,具备升降压双向工作能力,可根据系统运行工况自动切换工作模式,无需更改硬件拓扑,适配电池电压波动带来的工况变化。建模过程基于电力电子伏秒平衡核心原理,忽略器件导通损耗与线路损耗,聚焦稳态电压匹配与动态调节特性。
在电机电动牵引工况下,变换器工作于Boost升压模式,将电池输出的低压电能抬升至后级DAB变换器的额定工作电压,保障后级功率变换单元稳定工作;在电机制动回馈工况下,变换器切换为Buck降压模式,将后级回馈的高压电能降压处理,匹配电池充电电压阈值,实现安全高效充电。该变换器通过占空比的连续可调特性,实现前后级电压的动态适配,有效拓宽了整个储能驱动系统的电压工作范围,提升系统工况适配能力。
3.2 后级双有源桥DAB隔离变换器工作机理
双有源桥DAB变换器是本系统实现电气隔离与双向功率传输的核心单元,拓扑结构由原边全桥电路、高频隔离变压器与副边全桥电路组成。相较于传统隔离变换器,DAB拓扑具备动态响应速度快、功率双向流动平滑、稳压精度高、电气隔离安全性强等优势,广泛应用于新能源储能、电机驱动等双向功率变换场景。
本次模型采用单移相调制控制策略,通过调节原、副边桥臂驱动信号的移相角度,实现传输功率的连续、精准调控。系统能量流向完全由移相角度的调节方向决定,电动工况下,能量从储能侧正向传输至电机负载侧,为电机运行提供持续电能支撑;制动回馈工况下,能量反向传输,将电机发电产生的电能回馈至储能单元完成存储。该拓扑能够有效抑制母线电压波动,保障逆变侧直流母线电压稳定,为永磁同步电机矢量控制的精准运行提供稳定的电压基础。
4 三相两电平逆变器功率变换机理
逆变单元采用三相两电平IGBT全桥拓扑,是连接直流母线与永磁同步电机的核心功率变换装置,主要功能是将DAB变换器输出的恒定直流电能,转换为频率、幅值连续可调的三相正弦交流电,满足永磁同步电机宽速域、高精度调速的运行需求。
本次建模采用开关函数理论对逆变器工作特性进行精准刻画,通过定义三相桥臂开关管的导通与关断状态,完整复现逆变器不同开关组合下的输出电压特性。结合SVPWM空间矢量脉宽调制技术,可有效优化逆变器输出波形质量,降低三相电压、电流谐波畸变率,减少电机运行过程中的转矩脉动与铁损,提升电机稳态运行的平稳性。
在系统动态工况切换过程中,逆变器可快速响应控制指令,实时调整输出电压的幅值与频率,适配电机启动、加载、调速、制动等不同工作状态,同时在能量回馈阶段可反向工作于整流状态,将电机产生的交流电能转换为直流电能,为后端能量回收提供通路,保障系统双向能量循环的完整性。
5 永磁同步电机本体动态特性分析
本文仿真核心被控对象为表贴式永磁同步电机,该类型电机直轴与交轴电感数值基本一致,无磁阻转矩输出,具备结构简单、转矩脉动小、调速范围宽、运行效率高、控制算法简洁等优势,契合高精度伺服驱动与新能源传动系统的应用需求。为实现电机的高精度解耦控制,本次建模基于同步旋转dq坐标系构建电机动态模型,彻底解决三相静止坐标系下电机变量耦合、控制复杂的问题。
5.1 定子电压动态耦合特性
在同步旋转坐标系下,永磁同步电机的直轴与交轴电压存在显著的动态耦合特性,电机转速越高,耦合干扰效应越明显,直接影响电流跟踪精度与系统控制稳定性。电机定子电压不仅包含电阻压降与电感动态压降,还存在由转子旋转产生的反电动势耦合压降,该交叉耦合效应是导致电机动态响应滞后、稳态控制误差的核心干扰因素。因此,必须通过后续前馈解耦控制算法消除耦合影响,实现励磁与转矩的独立调控。
5.2 电磁转矩输出特性
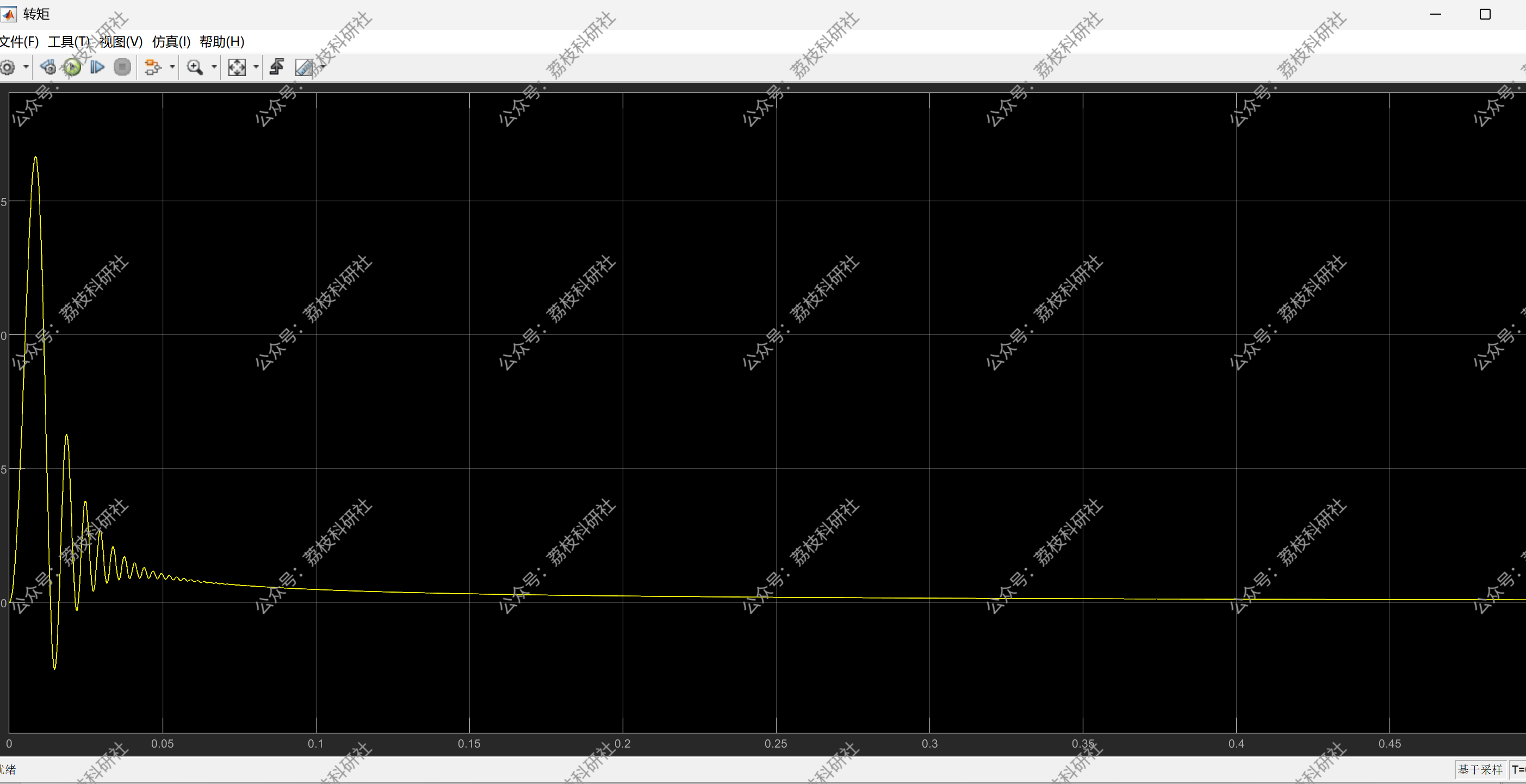
永磁同步电机的电磁转矩由励磁转矩与磁阻转矩两部分组成,转矩输出特性直接决定电机的负载驱动能力。针对本次采用的表贴式永磁同步电机,由于直交轴电感相等,磁阻转矩分量完全抵消,电机转矩仅由永磁体励磁与交轴电流耦合产生,使得转矩与交轴电流呈现线性对应关系。
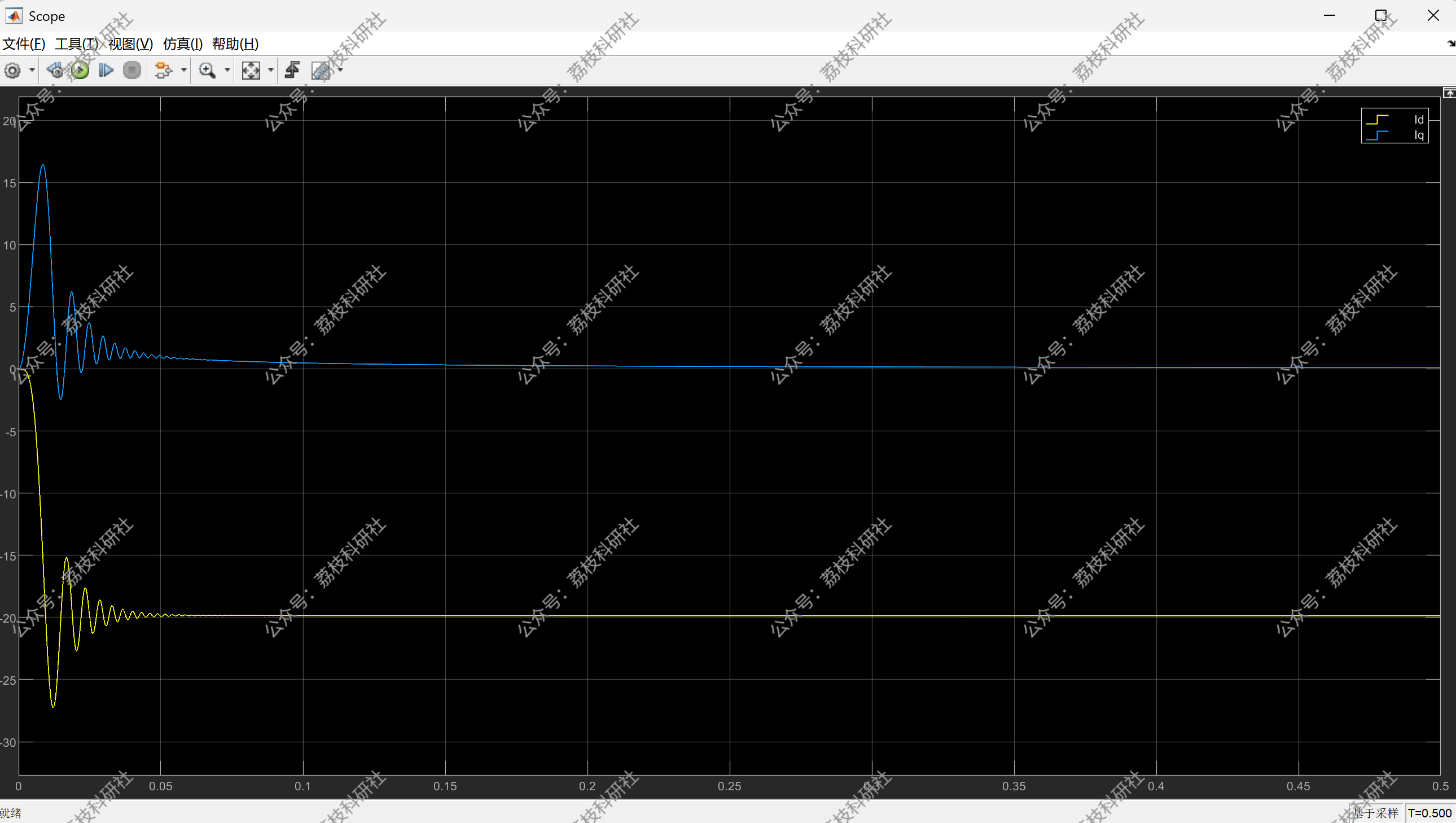
基于这一特性,本文采用业界经典的零直轴电流控制策略,将直轴电流始终控制为零,完全实现励磁分量与转矩分量的解耦控制,只需调节交轴电流即可精准控制电机输出转矩,既简化了闭环控制算法结构,又能保证电机始终工作在最大转矩电流比状态,提升电机运行效率与动态响应速度。
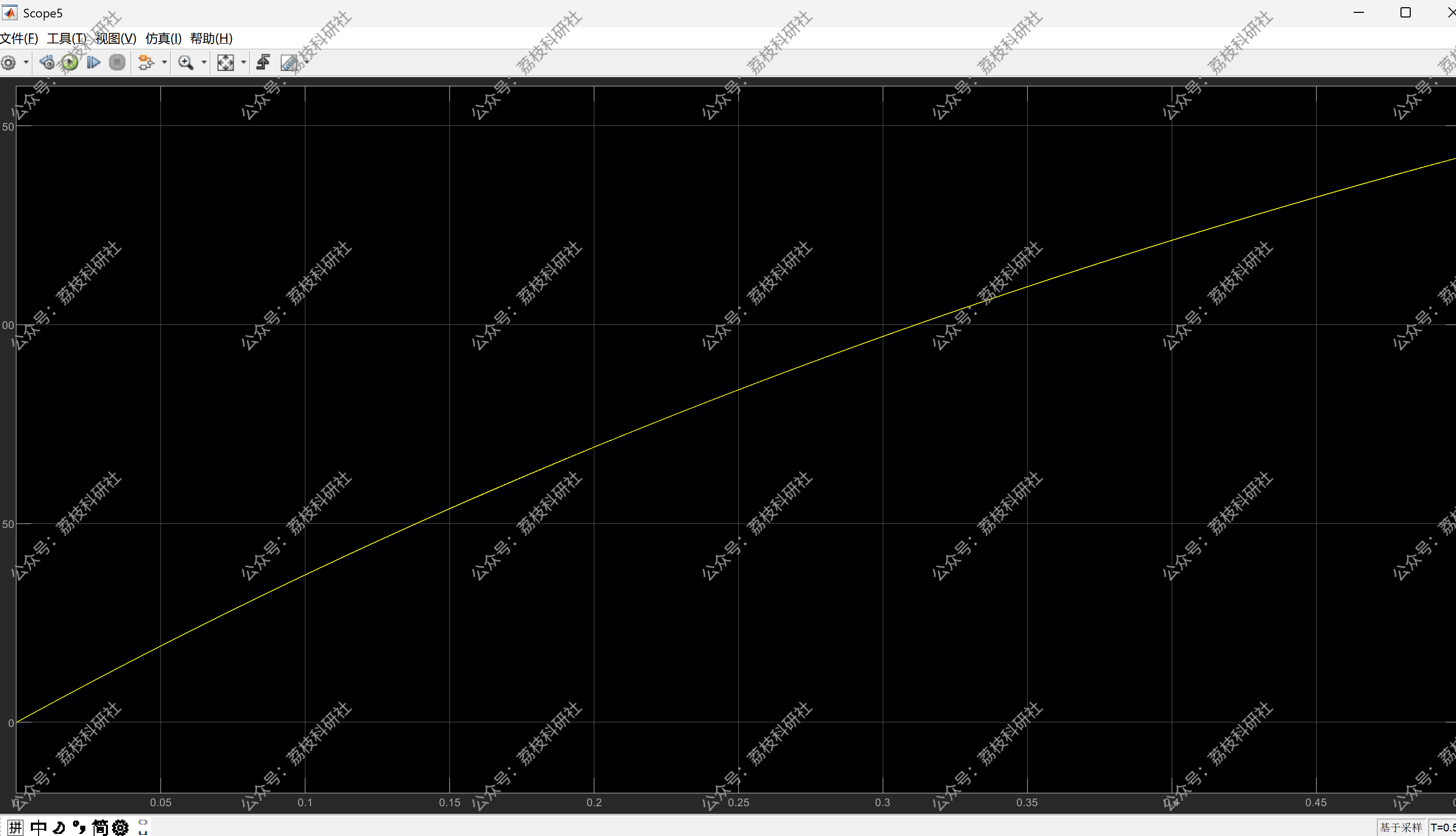
5.3 机械动力学运行特性
电机转子的转速动态变化特性由电磁转矩、负载转矩与摩擦阻尼转矩共同决定,完整反映了电机启动、稳态运行、负载扰动、减速制动等全过程的机械运动规律。当电机电磁转矩大于外部负载转矩与摩擦转矩之和时,电机转速上升;当电磁转矩与负载、阻尼转矩平衡时,电机维持稳态恒速运行;当电磁转矩小于负载转矩或反向制动时,电机转速下降,实现制动工况切换。
模型精准考虑了转子与负载的总转动惯量、粘滞摩擦系数等关键机械参数,能够真实还原实际工况中转速波动、动态响应、稳态稳速的物理过程,保证仿真工况与工程实际高度契合。同时,通过转子机械角度与电气角度的对应关系,为后续坐标变换与矢量控制提供精准的位置基准。
6 双闭环FOC矢量控制机理分析
为实现永磁同步电机的高精度调速与平稳转矩输出,本系统采用转速-电流双闭环磁场定向控制(FOC)策略。该控制算法的核心思想是通过坐标变换,将非线性、强耦合的三相交流电机模型等效为独立可控的直流电机模型,实现励磁电流与转矩电流的完全解耦。其中,外环转速环负责系统稳态无静差调速与抗负载扰动调节,内环电流环负责快速跟踪电流给定、抑制谐波与耦合干扰,双闭环级联结构兼具优异的动态响应性能与稳态控制精度。
6.1 坐标系变换解耦原理
三相静止坐标系下的电机三相电流存在冗余耦合关系,无法实现独立调控。通过Clark变换可将三相静止坐标系下的交流电流信号转换为两相静止坐标系下的正交电流信号,消除变量冗余性,简化控制维度。在此基础上,依托转子实时电气位置角度,通过Park变换进一步将静止坐标系下的交流分量转换为同步旋转坐标系下的直流分量,最终分离出独立的励磁电流与转矩电流分量,彻底解决电机变量强耦合问题,为精准解耦控制奠定基础。
6.2 转速外环调节机理
转速外环作为系统主控外环,以预设给定转速与实际反馈转速的差值为调节依据,通过PI调节算法动态输出转矩电流给定值。系统全程采用零直轴电流控制方案,仅通过转速环调节交轴电流给定值,即可实现转速的精准调控。
考虑实际数字控制系统的离散工作特性,本次模型采用离散增量型PI控制算法,相较于传统模拟PI算法,更贴合工业控制器的迭代运行逻辑。其中比例环节负责快速缩小转速偏差,提升系统动态响应速度;积分环节持续累积偏差并进行补偿,彻底消除转速稳态静差,保证电机在稳态运行时转速无偏差、负载扰动下可快速恢复稳定。
6.3 电流内环前馈解耦调节机理
电流内环是系统的快速响应内环,直接决定电机电流的跟踪精度与动态响应速度。针对电机运行过程中直交轴电压的交叉耦合干扰,本次控制策略引入前馈解耦补偿算法,实现双轴电流的完全独立控制。
电流环首先根据实时电流反馈值与给定值的偏差,通过PI调节输出基础电压控制分量,再结合电机实时转速、电感参数与永磁磁链参数,引入反电动势耦合补偿项,抵消坐标轴之间的动态耦合干扰,最终得到精准的电压控制指令。该前馈解耦策略能够有效消除转速变化带来的电流扰动,大幅提升电流跟踪响应速度与控制精度,抑制电流谐波与转矩脉动,保障电机全工况平稳运行。
6.4 SVPWM调制工作机理
经过解耦控制得到的旋转坐标系电压指令,需通过反Park变换还原为两相静止坐标系下的调制电压信号,作为空间矢量脉宽调制的输入基准。SVPWM调制技术通过对逆变器八个基本电压矢量的组合调控,依据伏秒平衡原则分配有效矢量与零矢量的作用时长,合成连续平滑的圆形旋转电压矢量。
相较于传统正弦脉宽调制技术,SVPWM调制电压利用率更高、输出波形谐波含量更低,能够有效优化电机运行工况。调制模块最终输出六路互补对称的PWM驱动脉冲,精准控制三相逆变器桥臂开关管的导通与关断,实现交流电压幅值与频率的连续可调,满足电机宽范围调速的控制需求。
7 系统多工况能量流动与运行特性
7.1 电动牵引工况特性
电动牵引是系统的常规运行工况,此时整体能量沿储能单元向机械负载侧单向流动。锂电池输出直流电能,经前级Buck-Boost变换器升压稳压后,通过DAB隔离变换器正向传输至逆变侧直流母线,最终由三相逆变器转换为三相交流电驱动永磁同步电机旋转。
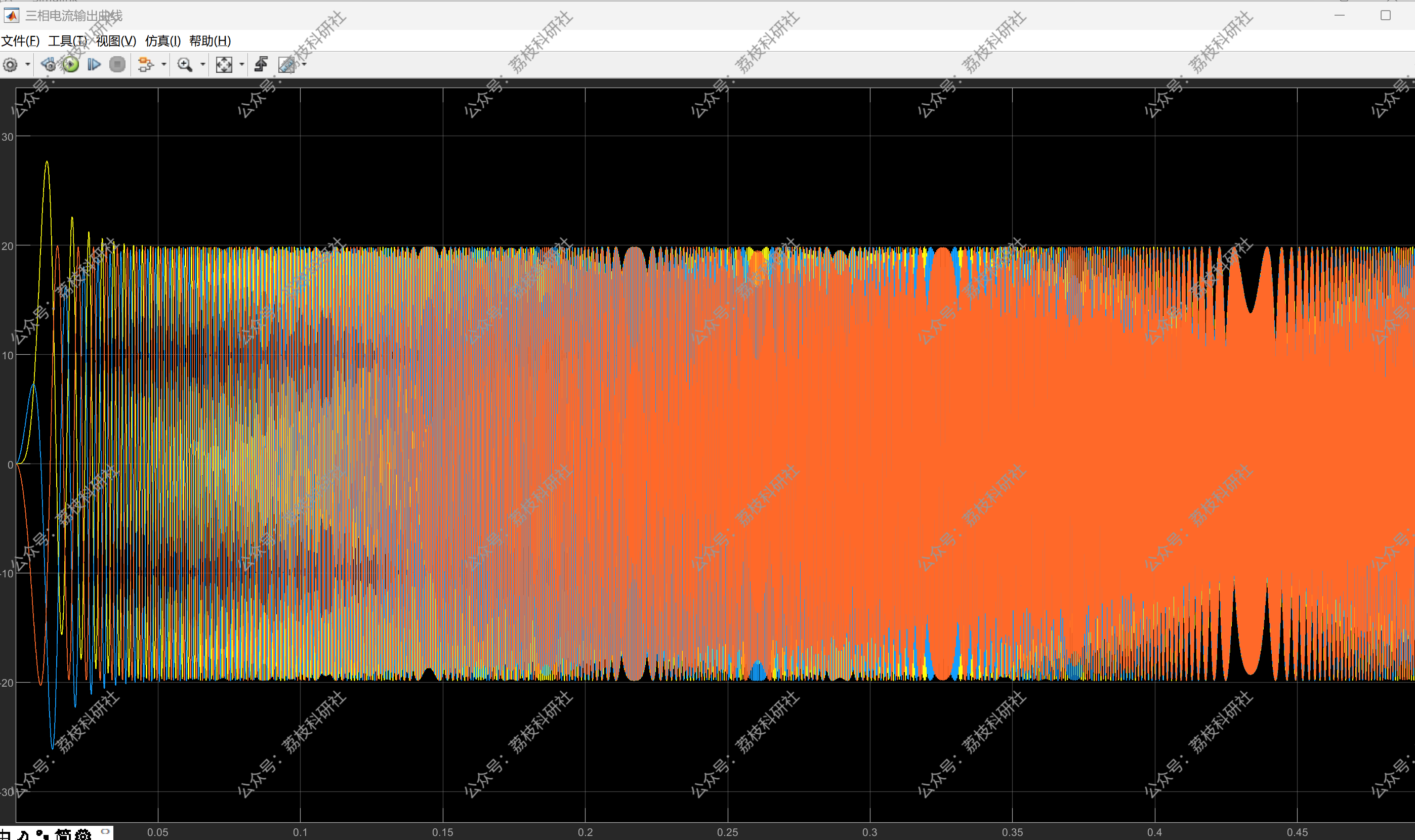
在该工况下,电机交轴电流为正向输出,电磁转矩大于负载摩擦与负载转矩,电机稳定跟踪给定转速拖动负载运行。系统各模块协同工作,母线电压稳定、电流波形正弦度良好,能量转换效率高,可实现电机启动、升速、恒速带载等全电动工况的稳定运行。
7.2 制动能量回馈工况特性
当系统执行减速制动、下坡运行或负载倒拖工况时,永磁同步电机脱离电动运行状态,切换为发电运行模式,实现机械能向电能的反向转换。电机转子旋转切割磁感线产生交流感应电能,经由三相逆变器整流转换为直流电能,再通过DAB变换器反向传输、Buck-Boost变换器降压适配后,回馈至锂电池完成充电存储。
该工况下电机交轴电流反向,输出制动转矩抑制转速上升,实现快速平稳制动。同时电池荷电状态小幅回升,有效回收制动过程中浪费的机械能,解决了传统传动系统制动能量损耗大的问题,显著提升系统整体能源利用效率,完美复现实际工程场景的制动能量回收特性。
8 仿真模型合理性与整体特性综述
本文所搭建的混合储能永磁同步电机驱动仿真模型,完全依托电力电子变换技术、机电能量转换原理、现代矢量控制理论搭建,建模逻辑严谨、层级清晰,符合工业仿真与学术研究的建模规范。模型通过合理的参数简化与特性保留,摒弃了次要干扰因素,精准聚焦系统核心运行机理与控制特性,同时引入数字控制离散滞后特性,最大程度贴合实际工程控制系统的运行状态。
该模型完整复现了混合储能驱动系统的核心优势特性,包括直流母线高精度稳压、电机宽速域动态调速、负载扰动自适应抗扰、双向能量高效循环、制动能量回收等,可全面反映系统稳态运行精度与动态响应性能。同时模型预留了完整的电气量、机械量观测通道,可精准分析母线电压波动、电池充放电规律、电机电流谐波、转速动态响应、转矩脉动等关键性能指标,可为后续控制策略优化、参数整定、工况特性分析提供坚实的理论支撑与仿真数据基础,具备良好的学术研究价值与工程参考意义。
📚第二部分——运行结果
🎉第三部分——参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。(文章内容仅供参考,具体效果以运行结果为准)
🌈第四部分——本文完整资源下载
资料获取,更多粉丝福利,MATLAB|Simulink|Python|数据|文档等完整资源获取

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 0
0 0
0- 0



 已为社区贡献311条内容
已为社区贡献311条内容

所有评论(0)