【滤波跟踪】刚性连杆柔性关节 manipulator 的扩展卡尔曼滤波器用于实时估计和控制附matlab代码
✅作者简介:热爱科研的Matlab仿真开发者,擅长毕业设计辅导、数学建模、数据处理、程序设计科研仿真。
🍎完整代码获取 定制创新 论文复现点击:Matlab科研工作室
👇 关注我领取海量matlab电子书和数学建模资料
🍊个人信条:做科研,博学之、审问之、慎思之、明辨之、笃行之,是为:博学慎思,明辨笃行。
🔥 内容介绍
一、引言
刚性连杆柔性关节机械臂在工业生产、航空航天等领域有着广泛应用。由于其关节的柔性,使得机械臂的动力学模型呈现高度非线性,这为状态估计和精确控制带来了挑战。扩展卡尔曼滤波器(EKF)作为一种处理非线性系统状态估计的有效方法,能够在实时环境中对机械臂的状态进行准确估计,进而为实现精确控制奠定基础。
二、刚性连杆柔性关节机械臂动力学模型
(一)模型建立
考虑一个具有 n 个关节的刚性连杆柔性关节机械臂,其动力学模型可以描述为:
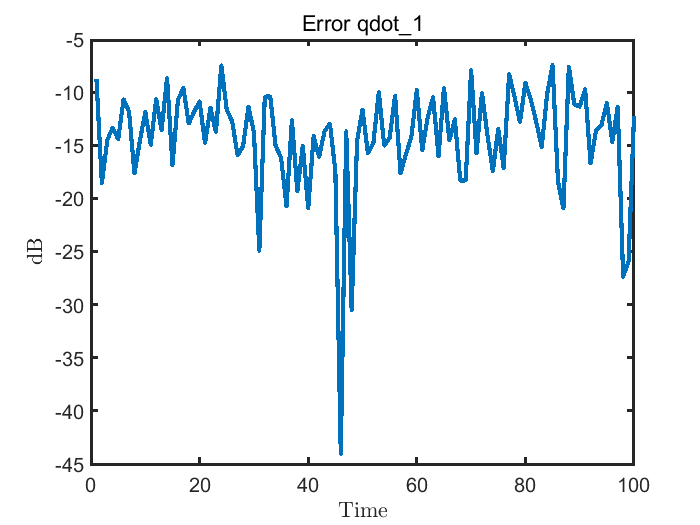
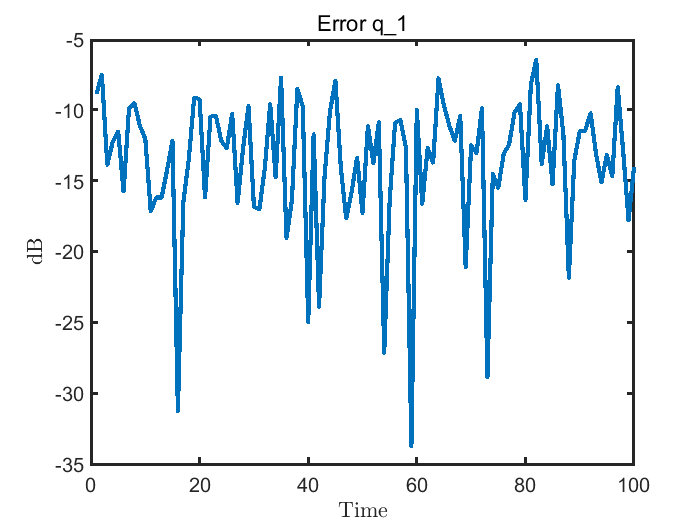
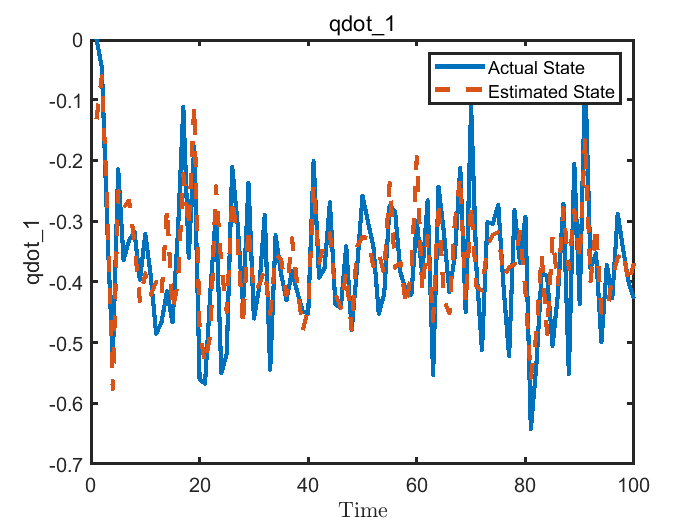
⛳️ 运行结果
📣 部分代码
n=4; %number of state
q=0.1; %std of process
r=0.1; %std of measurement
Q=q^2*eye(n); % covariance of process
R=r^2*eye(2); % covariance of measurement
T=[1;1];
f=@(x)[x(3);x(4);(-0.44*T(1) + 0.44*T(2) + 0.42*T(2)*cos(x(2))-0.36*sin(x(2))*x(4)*x(3)-0.18*sin(x(2))*x(3)^2-0.17*sin(x(2))*x(3)^2*cos(x(2))-0.18*sin(x(2))*x(4)^2)/(-1.26 + 0.18 * cos(x(2)) ^ 2);(0.44*T(1)+0.42*T(1)*cos(x(2))-0.32*T(2)-0.85*T(2)*cos(x(2))+0.36*sin(x(2))*x(4)*x(3)+0.35*x(3)*sin(x(2))*x(4)*cos(x(2))+1.37*sin(x(2))*x(3)^2+0.35*sin(x(2))*x(3)^2*cos(x(2))+0.18*sin(x(2))*x(4)^2+ 0.17*sin(x(2))*x(4)^2*cos(x(2)))/(-1.26 + 0.18 * cos(x(2)) ^ 2)]; % nonlinear state equations
h=@(x)[x(1);x(2)]; % measurement equation
s=[0;0;1;1]; % initial state
x=s+q*randn(4,1); %initial state % initial state with noise
P = eye(n); % initial state covraiance
N=20; % total dynamic steps
xV = zeros(n,N); %estmate % allocate memory
sV = zeros(n,N); %actual
zV = zeros(2,N);
for k=1:N
z = h(s) + r*randn(2,1); % measurments
sV(:,k)= s; % save actual state
zV(:,k) = z; % save measurment
[x, P] = ekf(f,x,P,h,z,Q,R); % ekf
xV(:,k) = x; % save estimate
s = f(s) + q*randn(4,1); % update process
end
for k=1:4 % plot results
subplot(4,1,k)
plot(1:N, sV(k,:), '-', 1:N, xV(k,:), '--')
end
🔗 参考文献
[1]崔文.多连杆柔性关节机器人的动力学与控制算法研究[D].南京航空航天大学,2016.
🍅更多免费数学建模和仿真教程关注领取

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐


 6
6 0
0- 0



 已为社区贡献140条内容
已为社区贡献140条内容

所有评论(0)