ICRA2026 最佳论文风向风向——具身智能拐点:世界模型、多模态融合与灵巧操作技术革命
ICRA2026 最佳论文风向风向——具身智能拐点:世界模型、多模态融合与灵巧操作技术革命
提要:
ICRA 2026于奥地利维也纳举办,会议有效投稿4947篇、录用1882篇,录用率38.04%。本届会议覆盖86个国家、八千余名参会人员,华人科研团队参与规模与成果质量位居全球前列。会议核心研究方向聚焦具身智能、物理AI、VLA视觉语言动作策略、灵巧操作与虚实迁移,本届涌现多项权威最佳论文成果,宾夕法尼亚大学GRASP Lab成果,斩获ICRA2026机器人操作与运动方向最佳论文,引领端到端灵巧操作范式;清华大学等《FP3: A 3D Foundation Policy for Robotic Manipulation》,入围本届机器人学习方向最佳论文Finalist,构建通用3D机器人基础操作策略,大幅提升机械臂小样本、跨场景泛化能力其中Franka机器人凭借高精度、高稳定性与完善开源生态,成为本届具身智能、机器人学习方向的主流真机验证平台,英伟达COSMOS世界模型、GR00T具身大模型等前沿算法均依托Franka完成真机验证。
一、热点:具身智能与机器人基础策略范式革新
本届ICRA 2026核心研究风向全面聚焦物理AI与通用具身智能,彻底颠覆传统模块化感知-规划-控制架构,端到端视觉语言动作(VLA)策略、机器人基础操作模型、虚实迁移学习成为第一大研究热点,相关论文占比超20%。行业研究重心从单一任务定制算法,转向可泛化、小样本、零迁移的通用机器人基础策略,旨在解决机器人真实场景适配性差、数据依赖度高、跨任务复用性弱的行业痛点。
FP3
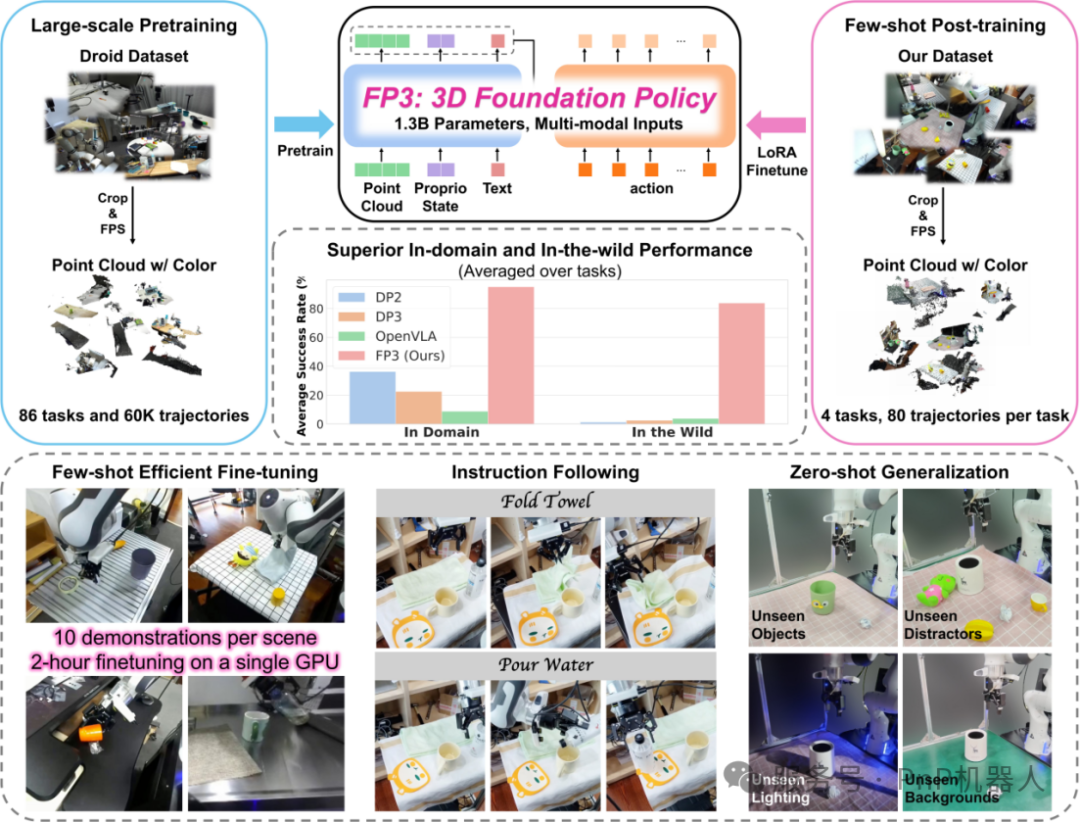
其中机器人学习方向的标杆成果,为清华大学团队发表的FP3: A 3D Foundation Policy for Robotic Manipulation,该论文成功入围本届会议机器人学习方向最佳论文Finalist,是该领域最具含金量的代表性成果。该研究依托Franka 机械臂搭建完整实操实验体系,基于DROID大规模机器人数据集完成预训练,构建轻量化3D通用操作基础策略,突破了传统机械臂算法场景单一、泛化能力薄弱的瓶颈,在少样本微调、跨场景物体抓取、精细化操作任务中实现性能大幅提升,为通用机械臂具身策略的研发与落地提供了标准化范式,也印证了Franka平台在高端机器人算法验证中的核心标杆地位。
二、虚实迁移与仿真落地技术突破
虚实迁移(Sim-to-Real)、仿真数据高效生成、模型鲁棒性优化是本届会议第二大核心热点,占比约12%,也是当前机器人算法从仿真走向真机落地的关键攻坚方向。大量研究围绕解决仿真与真实场景的域偏移问题展开,通过扩散模型噪声建模、域随机化、触觉感知融合、轨迹优化等技术,降低真机训练成本,提升算法真实环境适配能力。本届多项高价值录用论文与入围成果,均以Franka机械臂为真机验证载体,完成虚实迁移算法的闭环测试。其中扩散抓取相关研究通过优化深度噪声建模策略,有效弥补仿真图像与真实场景的感知差异,在Franka机械臂的无序物体抓取、精细对位操作中,显著提升了仿真迁移成功率。同时,英伟达COSMOS世界模型、GR00T具身大模型等国际前沿算法,均以Franka真机为官方验证平台,通过预判环境未来状态、优化动作输出逻辑,实现虚实场景的无缝衔接,充分证明Franka平台适配世界模型、扩散策略、基础操作模型等各类前沿算法的落地需求,成为虚实迁移技术迭代的核心硬件载体。
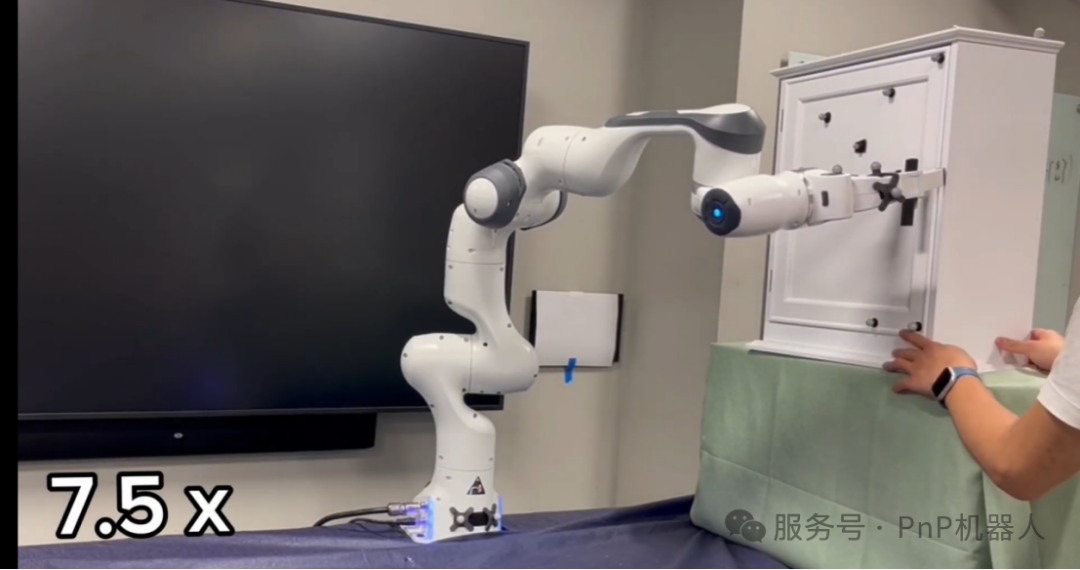
 双臂FRANKA机器人以及GR00T具身模型
双臂FRANKA机器人以及GR00T具身模型
三、ICRA 2026将双臂协同智能操作列为机器人实操领域的重点突破方向,聚焦解决单臂机器人无法胜任的精密装配、柔性物体操控、多步骤协同复杂作业等难题,是通用具身智能落地生活化、工业化场景的关键核心技术。
代表论文中:Dexora 基于双臂灵巧操作并开源整套 VLA 框架;Bi-Adapt 实现少样本双臂自适应协同,仅用少量演示即可适配全新物体与任务;SymSkill 完成双臂符号技能拆解与复用,实现长时序复杂任务自主规划。
 symskill长序列规划
symskill长序列规划
顶级双臂研究硬件高度统一,几乎全部采用双 Franka 方案,无论是新一代 FR3 还是经典 Panda,双 Franka 已经成为全球双臂灵巧操作的成熟、通用、可横向对比的标准平台。双Franka机器人平台独特的技术优势,其高精度力控、毫秒级同步协同与柔顺交互特性,适配各类复杂双机作业任务。相较于普通机械臂,Franka双臂具备主动柔顺容错能力,可实现精密对位、柔性物体协同操控等高危精细作业。整体趋势非常清晰:人精细操作研究,默认就是双 Franka 双臂平台。
四、触觉 / 力觉全面回归,从锦上添花升级为必备核心模态
传统纯视觉操作缺乏力模态信息,仅靠图像无法判断接触状态、材质刚度、受力情况与交互稳定性,无法支撑精密装配、柔性交互、容错抓取等真实落地任务。触觉、力觉感知正式从辅助功能升级为机器人物理交互的必备模态。
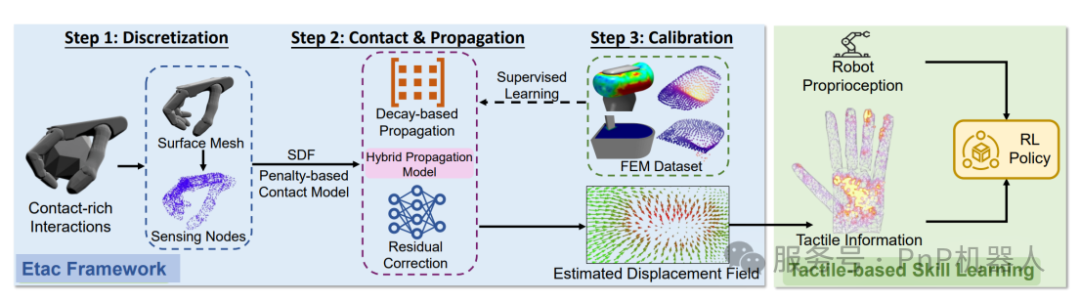
ETac统一触觉仿真框架
Franka 原生自带高精度、高带宽力控能力,成为本届触觉研究爆发的核心硬件载体。ETac 触觉仿真框架成功入围最佳论文,提出轻量级高保真触觉仿真框架,在接近有限元(FEM)精度的同时支持环境并行训练,大幅提升灵巧操作学习效率,为触觉驱动机器人技能训练提供高效工具。;多篇操作类论文明确提出 “力控闭环 + 触觉反馈” 是精细操作的硬性前提。未来机器人操作正式确立新范式:视觉负责语义理解、语言负责任务指令、力触觉负责物理交互,三者融合成为下一代灵巧操作的标准架构。
五、Franka 高度集中核心算法赛道,垄断机器人学习、规划控制、操作运动三大方向
根据 ICRA2026 全部最佳论文 Finalist 统计,本届所有 Franka 相关论文高度集聚在纯算法核心赛道,特征极其明显:全部 Franka 论文中,80% 集中在机器人学习、规划与控制、操作与运动三大方向。

- Robot Learning:4 篇入围、3 篇使用 Franka机器人
- Planning & Control:3 篇入围、2 篇使用 Franka机器人
- Manipulation & Locomotion:5 篇入围、3 篇使用 Franka机器人

Franka 凭借 7DoF 柔性力控、高动态响应、全球统一软件生态、极强的可复现性,成为高精度接触式、泛化性、学习型机器人算法的唯一主流验证硬件。反观医疗机器人、机构设计、多机器人集群、野外服务等方向,几乎完全不用 Franka机器人,赛道分工彻底定型:Franka = 通用灵巧具身算法的行业标准真机。
总结
整体来看,ICRA2026 完整揭示了 2026–2027 年全球具身智能的固定发展格局:VLA 通用化成为算法底座、Sim-to-Real 工程化成为研发底座、双臂协同成为能力上限、力触觉多模态融合成为落地关键、Franka 统一软硬件算法测试平台标准。行业正式从 “模型效果比拼” 转向 “真实物理落地能力比拼”。
在全球高端科研硬件高度统一、技术赛道高度内卷的背景下,PNP 机器人紧跟国际前沿技术趋势,对标高端力控、灵巧操作、多模态具身交互体系,持续布局通用型具身操作能力建设。PNP 机器人作为 Franka Robotics 2025-2026 年度中国区最大合作伙伴,专注服务国内高校、科研院所与科创企业,打造面向具身智能领域的一站式软硬件解决方案。依托深度合作优势,PNP 全面推出 Franka 单臂、双臂成套平台,依托原生高精度力控、高动态响应特性,完美适配机器人学习、VLA 泛化操作、双臂协同等前沿研究场景。
针对精细化操作需求,团队配套多款主流灵巧手产品,覆盖多自由度五指灵巧手、紧凑型夹爪等不同形态,集成视觉、触觉等多类感知模块,满足精细抓取、精密装配等复杂任务。同时,PNP 布局动作捕捉、力反馈遥操作整套数据采集系统,融合数据手套、姿态追踪设备与主从控制单元,兼容主流机器人开发框架,能够高效完成人机交互、示教学习所需的数据采集工作。整套方案软硬件深度联动,为国内具身智能算法研发、真机验证与技术落地提供完整支撑。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 2
2 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)