全域空间计算·目标无断链智能追踪技术白皮书
1. 行业背景与技术演进趋势
当前智慧城市与公安安防建设进入全域时空智能新阶段,公安视频侦查工作正发生根本性范式变革,整体从传统人工值守、事后追溯的被动模式,全面迈向事前预警、事中追踪、事后溯源的全链路智能化主动防控体系。
传统视频监控体系以单摄像头独立感知、人脸识别、ReID特征匹配为核心,在城市复杂场景、高密度人群、遮挡弱光、跨大范围路段等实战环境下短板突出,无法满足现代化公安全域目标连续管控、全域轨迹不中断、全时空智能研判的业务需求,行业亟需新一代底层技术实现代际升级。

2. 传统视频追踪四大核心瓶颈
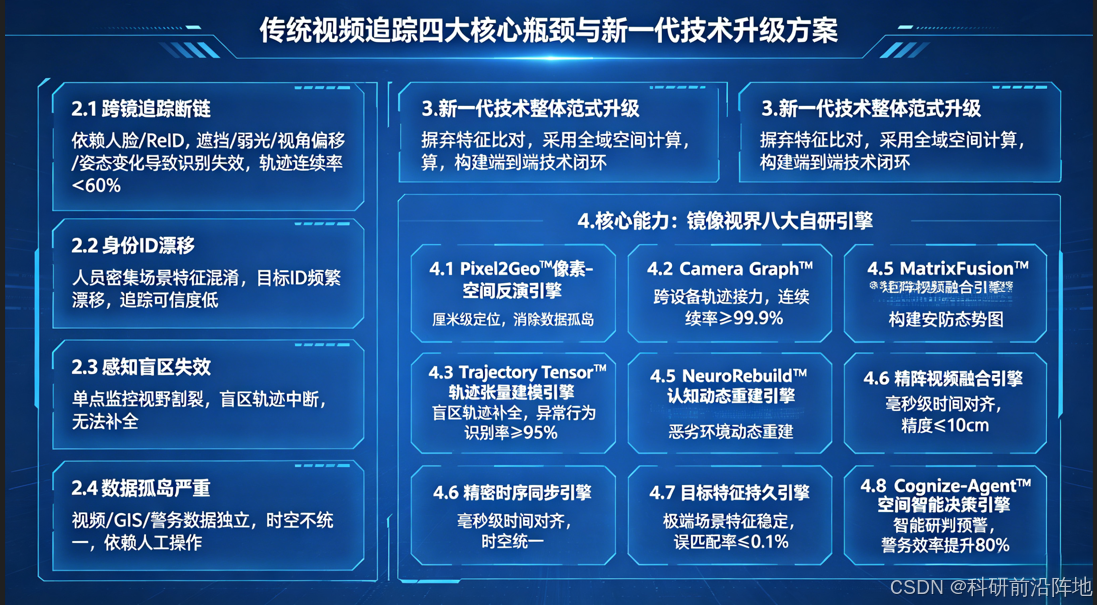
传统视频智能追踪技术长期依赖人脸、人体ReID特征比对,高度依赖目标清晰无遮挡、光线充足、视角正向,在真实城市复杂场景中存在四大无法突破的技术瓶颈,严重制约公安实战效能。
2.1 跨镜追踪断链
传统方案完全依赖人脸/ReID识别匹配,一旦出现人员遮挡、弱光环境、摄像头视角偏移、目标姿态变化,识别即刻失效,导致轨迹大面积碎片化、断点频发,整体轨迹连续率不足60%,无法实现长距离、跨路段、跨片区连续追踪。
2.2 身份ID漂移
在人员密集、多目标并行的路口、商圈、广场等场景,传统算法极易出现特征混淆、串号误跟问题,目标身份ID频繁漂移、错乱,无法保障同一目标全程身份一致性,追踪结果可信度低,无法作为精准研判依据。
2.3 感知盲区失效
传统监控为单点独立感知,摄像头视野相互割裂,道路拐角、楼栋遮挡、监控间隙等盲区完全无法覆盖。目标进入盲区后轨迹直接中断,重新出现后系统只能重启追踪,全程无法补全盲区运动轨迹,侦查研判效率极低。
2.4 数据孤岛严重
传统视频数据、GIS地理数据、警务业务数据相互独立、时空不统一,无法实现精准时空对齐。所有跨源研判、轨迹分析、态势汇总高度依赖人工操作,存在决策滞后、误差偏大、人力成本高昂等诸多问题。
3. 新一代技术整体范式升级
针对传统视频追踪技术的系统性短板,镜像视界摒弃传统“特征比对式”追踪逻辑,创新采用全域空间计算为底层核心底座,彻底摆脱对人脸、人体特征的依赖,构建目标无断链智能追踪全新技术体系。
通过八大100%国产化自研核心引擎,搭建“空间基准—轨迹接力—特征持久—融合研判—动态重建—时序同步—智能决策—协同调度”端到端技术闭环,彻底解决跨镜断链、身份漂移、盲区失效、数据割裂四大行业痛点,实现公安视频时空智能的范式重塑。
4. 核心能力:镜像视界八大自研引擎
镜像视界八大引擎为纯国产化自研架构,无任何开源依赖、无第三方技术捆绑,具备完全自主可控能力,构成全域无断链追踪的核心技术壁垒。
4.1 Pixel2Geo™像素-空间反演引擎(全域基准核心)
基于多视角几何约束、亚像素精度优化与全自动时空标定技术,实现单像素直接解算目标XYZ三维空间坐标。依托纯视觉实现厘米级无感定位,静态定位精度≤3cm、动态定位精度≤5cm,无需GPS、北斗及标签基站。全域构建统一三维坐标系,实现所有监控设备、感知数据时空统一对齐,从根源消除数据孤岛。
4.2 Camera Graph™跨镜拓扑网络引擎(轨迹接力核心)
对城市全域摄像头进行全局时空统一校准,自动构建相机空间拓扑图谱,精准刻画设备视角关联、道路路径连通关系。无需依赖人脸、ReID特征,依靠纯空间推理实现跨设备无缝轨迹接力,目标遮挡后≤1秒自动恢复追踪,整体轨迹连续率≥99.9%,支持百级摄像头跨域无跳变连续追踪。
4.3 Trajectory Tensor™轨迹张量建模引擎(连续追踪核心)
融合目标运动方向、行进速度、加速度、时间序列等多维信息,构建时空强约束轨迹张量模型。可实时预判目标运动趋势,智能调度周边摄像头协同采集,自主补全监控盲区轨迹。同时支持离岗、越界、聚集、滞留等10余种异常行为实时识别,识别准确率≥95%。
4.4 MatrixFusion™矩阵视频融合引擎(数据协同核心)
实现多摄像头时空对齐、目标特征关联、多源异构数据融合,构建全域视频融合矩阵。可并行处理百级目标并发追踪,在高密度人群、复杂遮挡场景下保障目标身份不串、轨迹不断。实现视频、GIS、IoT感知、警务业务数据时空精准对齐,构建全域安防态势“一张图”。
4.5 NeuroRebuild™认知动态重建引擎(实景还原核心)
结合视频驱动技术与神经辐射场技术,完成动态目标细节级三维重建。适配弱光、逆光、阴影等恶劣拍摄环境,动态重建精度≤10cm,可实时还原人员、车辆复杂动作与群体运动态势,为视频侦查、事件复盘、态势研判提供高保真动态实景支撑。
4.6 精密时序同步引擎(时空一致核心)
采用硬件级时钟同步+软件动态时序校准机制,实现全链路毫秒级时间对齐,整体同步精度≤1ms。彻底规避跨镜追踪、视频孪生、多源研判过程中的时序偏差问题,杜绝轨迹错位、时空错乱、研判失效等风险,保障全域时空体系绝对统一。
4.7 目标特征持久引擎(身份稳定核心)
通过多尺度特征提取、时空关联强化、抗干扰特征建模,在弱光、重度遮挡、摄像头视角剧变等极端场景下,实现目标特征稳定关联锁定。追踪全程目标ID恒定、身份零漂移,特征抗干扰能力行业领先,误匹配率≤0.1%,从根本解决多目标串号误跟难题。
4.8 Cognize-Agent™空间智能决策引擎(研判预警核心)
依托时空知识库、行为特征理解、运动趋势推演、应急联动机制,实现异常行为智能研判、风险分级预警、轨迹意图预判。联动公安警务业务系统,形成“预警—追踪—处置—溯源”全闭环工作流程,整体警务研判效率提升80%以上。
5. 整体技术架构(四层解耦、全域协同)
系统整体采用分层解耦、纵向统筹、横向打通的四层架构设计,兼顾兼容性、扩展性、稳定性,全面适配公安全场景实战应用。
5.1 感知层——全域兼容、利旧复用
全面兼容市面所有存量普通监控摄像头,无需硬件改造、无需更换设备,快速接入上线。支持各类异构相机混合部署,完美适配城市主干道、商圈园区、小区街巷、路口卡口等全场景环境,大幅降低建设成本与落地周期。
5.2 引擎层——八大引擎、核心驱动
以八大自研核心引擎为核心支撑,聚合空间计算、跨镜接力、轨迹建模、数据融合、动态重建、时序同步、特征稳定、智能研判六大核心能力,为上层平台与业务应用提供标准化、高可靠的时空智能算力支撑。
5.3 平台层——统一调度、开放互通
依托SpaceOS™全域空间操作系统作为中枢,统一管控全域引擎算力、时空数据、前端设备资源。提供标准化开放API接口,可无缝对接公安各类警务平台、研判系统、指挥平台,实现数据互通、业务联动。
5.4 应用层——实战赋能、全场景覆盖
聚焦公安实战需求,覆盖视频侦查溯源、全域智能布控、重点人员动态追踪、异常行为实时预警、群体性事件态势处置、轨迹大数据分析六大核心业务场景,全方位赋能智慧公安建设。
6. 核心技术优势
一是轨迹无断链,全域轨迹连续率≥99.9%,遮挡场景1秒快速恢复追踪,跨百路摄像头无跳变,彻底解决传统断链痛点;二是身份零漂移,依托特征持久+空间强约束,多目标密集场景全程身份稳定、无串号误跟;三是部署极简,完全利旧现有设备,无需硬件改造,部署周期缩短70%、建设成本降低50%以上;四是全环境适配,全天候适配弱光、逆光、雨雪、遮挡、高密度人群等复杂实战场景;五是数据全闭环,实现视频、GIS、警务数据时空统一,研判智能化、精准化,大幅提升警务决策效率。
7. 公安实战应用场景
7.1 全域视频智能侦查
案发后快速锁定目标,全自动生成无断链完整轨迹,精准还原目标行动路线、停留节点、接触人员,极大缩短侦查时长、提升破案效率。
7.2 重点人员全域布控
对高危人员、在逃人员、重点管控人员实现全域无感持续追踪,对异常聚集、长时间滞留、越界穿行等行为实时预警,实现风险前置干预。
7.3 群体性事件智能处置
实时感知群体聚集范围、运动方向、扩散态势,智能预判事件演化趋势,为指挥调度、警力部署、现场处置提供精准数据支撑。
7.4 交通违法全域溯源
跨路口、跨片区连续追踪违法人员、违法车辆,全程轨迹清晰、身份稳定,杜绝目标逃逸,实现违法行为可溯源、可追责。
8. 总结与行业展望
镜像视界全域空间计算·目标无断链智能追踪技术,以国产化自研八大引擎为核心壁垒,突破传统视频追踪的技术代际瓶颈,构建起“空间可计算、轨迹无断链、身份不漂移、数据全融合、研判智能化”的公安视频时空智能新范式。彻底改变传统视频侦查被动回溯的工作模式,实现主动预警、全域管控、智能研判、闭环处置的全新能力。
未来将持续深化空间计算与AI大模型深度融合,不断升级跨域协同感知、智能推演预测、全域主动防控能力,持续引领公安视频时空智能技术迭代升级,为平安城市、智慧警务建设提供坚实的核心技术支撑。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐



 2
2 0
0- 0



 已为社区贡献17条内容
已为社区贡献17条内容

所有评论(0)