基于深度网络的雷达小目标检测系统设计与实现(雷达小目标检测,YOLOv11,CBAM注意力机制,深度学习,PyQt5)
随着低空安防、自动驾驶毫米波雷达感知、战场态势感知等领域的快速发展,雷达小目标检测技术的重要性日益凸显。雷达小目标具有雷达散射截面(RCS)小、信噪比低、杂波干扰强、特征信息匮乏等特点,传统恒虚警率(CFAR)检测方法在复杂背景下存在漏检率高、虚警率高的问题。为提升雷达小目标自动检测的效率与精度,本文提出基于深度神经网络的雷达小目标检测方案,并设计实现一套完整的检测系统。
在数据准备方面,本文从RADDet毫米波雷达数据集和MSTAR合成孔径雷达公开数据集中筛选出包含小目标的样本,对雷达回波图格式进行统一化与预处理操作,构建起包含多尺度、多场景、多杂波类型的Radar-Small数据集。算法选择上,选取当前主流的YOLO系列目标检测算法进行对比,覆盖YOLOv5n、YOLOv7-tiny、YOLOv11n和YOLOv10n四个版本。对比实验结果显示,YOLOv11n在准确度和推理速度的平衡上表现最优,但对强杂波背景下的极小目标识别仍存在提升空间。为增强模型在复杂雷达场景中的小目标检测能力,本文在YOLOv11的P3特征层与P4特征层中同步嵌入了CBAM注意力模块,通过强化模型对关键目标区域的特征聚焦能力,有效抑制了背景杂波干扰。改进后模型的精确率提升至0.892,召回率提高至0.827,mAP@0.5达到0.861,且推理速度仅下降3.2%,在保障实时性的前提下实现了检测精度的显著提升。
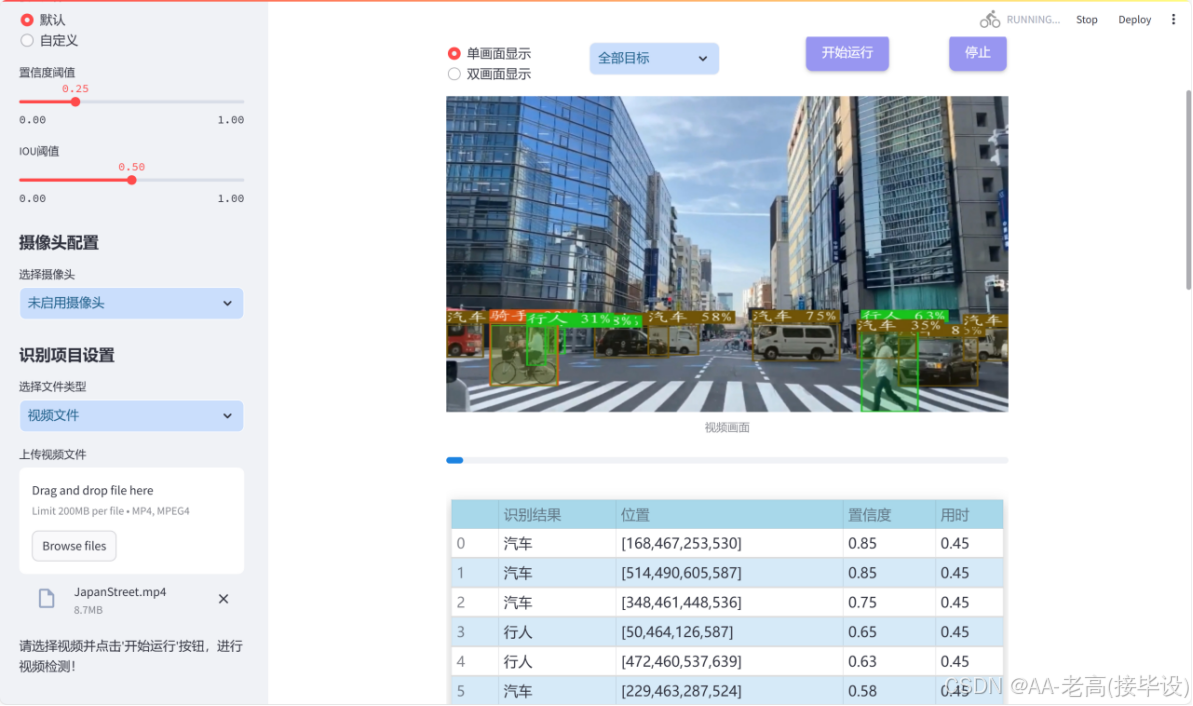
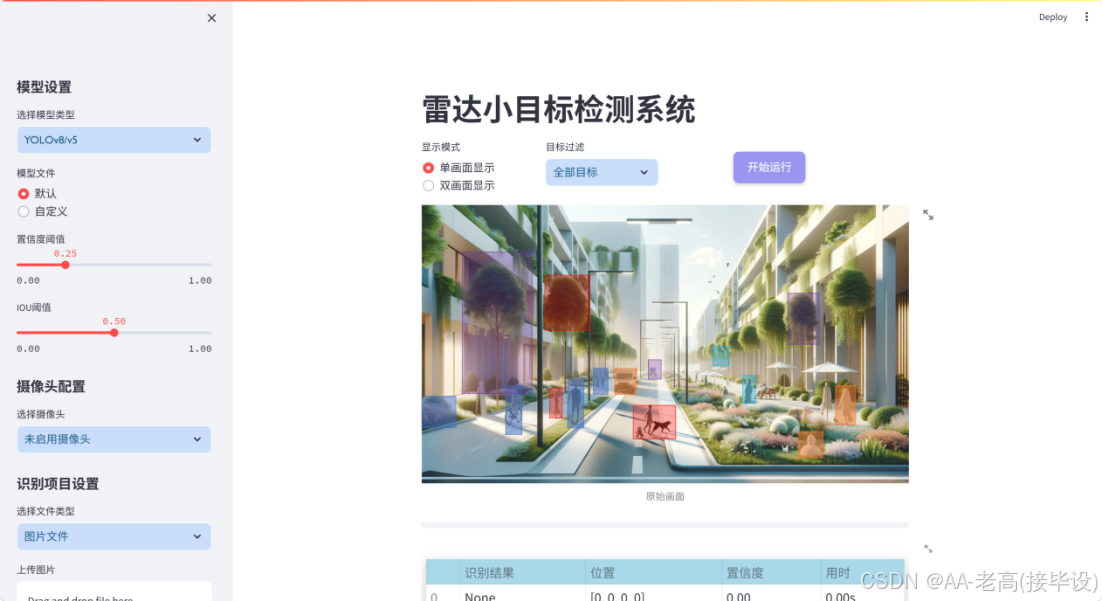
最终基于PyQt5框架设计开发了一套功能完整的雷达小目标检测系统。该系统支持用户注册登录、自定义模型加载、单张/批量雷达图像导入、检测结果可视化展示与统计、结果导出保存等功能。界面设计注重用户体验,操作流程简洁直观。通过黑盒测试验证系统运行稳定可靠,可满足低空安防、自动驾驶等领域的雷达小目标检测需求。
关键词:雷达小目标检测,YOLOv11,CBAM注意力机制,深度学习,PyQt5
Title Design and Implementation of a Radar Small Target
Detection System Based on Deep Neural Networks
With the rapid advancements in low-altitude security, autonomous driving millimeter-wave radar sensing, and battlefield situational awareness, the importance of radar small target detection technology has become increasingly prominent. Radar small targets are characterized by a small radar cross-section (RCS), low signal-to-noise ratio, strong clutter interference, and limited feature information. Traditional constant false alarm rate (CFAR) detection methods suffer from high missed detection rates and false alarm rates in complex environments. To enhance the efficiency and accuracy of radar small target detection, this paper proposes a deep neural network-based detection approach and designs a comprehensive detection system.
In terms of data preparation, this study selected samples containing small targets from the RADDet millimeter-wave radar dataset and the MSTAR synthetic aperture radar public dataset. The radar echo map formats were standardized and preprocessed to construct the Radar-Small dataset, which encompasses multiple scales, scenarios, and clutter types. For algorithm selection, four mainstream YOLO versions—YOLOv5n, YOLOv7-tiny, YOLOv11n, and YOLOv10n—were compared. Experimental results demonstrate that YOLOv11n achieves optimal balance between accuracy and inference speed, though further improvement remains possible for detecting extremely small targets under strong clutter backgrounds. To enhance the model's small-target detection performance in complex radar environments, CBAM attention modules were embedded simultaneously into both the P3 and P4 feature layers of YOLOv11. This enhancement strengthens the model's focus on key target regions while effectively suppressing background clutter interference. The improved model achieves an accuracy of 0.892, a recall rate of 0.827, and an mAP@0.5 score of 0.861, with inference speed decreasing by only 3.2%—significantly improving detection precision while maintaining real-time performance.
Ultimately, a fully functional radar small-target detection system was designed and developed using the PyQt5 framework. The system supports user registration and login, custom model loading, import of single or batch radar images, visual display and statistical analysis of detection results, as well as result export and saving. The interface design prioritizes user experience with simple and intuitive operation workflows. Black-box testing confirmed the system's stable and reliable performance, making it suitable for radar small-target detection applications in fields such as low-altitude security and autonomous driving.
Keywords: Radar Small Target Detection, YOLOv11, CBAM Attention Mechanism, Deep Learning, PyQt5
目 录
第1章 绪 论
1.1 研究背景和意义
在现代信息化战争和民用安防体系中,雷达作为全天候、全天时的主动探测设备,发挥着不可替代的作用。随着无人机技术的快速普及和低空开放政策的推进,低空慢速小目标(LSS)对机场、核电站、军事基地等重要场所的安全威胁日益加剧。同时,自动驾驶技术的发展对车载毫米波雷达的小目标检测能力提出了更高要求,需要准确识别路面上的行人、自行车、路障等小尺寸目标。
雷达小目标通常指RCS小于0.1m²的目标,这类目标回波信号微弱,极易被地物杂波、气象杂波和系统噪声淹没。传统的雷达目标检测方法主要基于CFAR算法,通过估计背景杂波的统计特性来设置检测阈值。然而,在复杂非均匀杂波环境下,CFAR算法难以准确估计杂波分布,导致虚警率和漏检率显著升高。此外,传统方法依赖人工设计的特征,无法充分利用雷达回波中的深层信息,对小目标的特征提取能力有限。
近年来,深度学习技术在计算机视觉领域取得了突破性进展,为雷达小目标检测提供了新的解决方案。基于卷积神经网络(CNN)的目标检测算法能够自动学习目标的深层特征,具有更强的特征表达能力和抗干扰能力。其中,YOLO(You Only Look Once)系列算法凭借其优异的实时性和检测精度,成为了目标检测领域的主流选择。将YOLO算法应用于雷达小目标检测,能够有效解决传统方法存在的问题,提升检测系统的性能。
本研究针对雷达小目标检测的难点,基于YOLOv11算法进行改进,构建适用于复杂杂波环境的雷达小目标检测模型,并开发一套可视化的检测系统。该研究不仅能够推动深度学习在雷达信号处理领域的应用,还能为低空安防、自动驾驶等实际场景提供技术支持,具有重要的理论意义和应用价值。
1.2 研究现状
国外对深度学习在雷达目标检测中的应用研究起步较早。2018年,Google公司的研究人员首次将Faster R-CNN算法应用于合成孔径雷达(SAR)图像目标检测,在MSTAR数据集上取得了优于传统方法的检测结果。2020年,美国麻省理工学院(MIT)的研究团队提出了一种基于YOLOv3的毫米波雷达目标检测算法,通过对雷达点云数据进行网格化处理,实现了对车辆和行人的实时检测。
2022年,德国博世公司的研究人员针对车载毫米波雷达的小目标检测问题,对YOLOv5算法进行了改进,引入了多尺度特征融合模块,提高了对小尺寸目标的检测精度。同年,韩国首尔大学的研究团队提出了一种结合注意力机制的YOLOv7算法,用于SAR图像中的舰船小目标检测,通过增强模型对目标区域的关注度,有效抑制了海洋杂波的干扰。
2023年,美国洛克希德·马丁公司发布了基于深度学习的雷达目标检测系统,该系统采用Transformer架构,能够同时处理多帧雷达回波数据,实现了对高速小目标的跟踪与检测。总体来看,国外研究主要集中在算法改进和工程化应用方面,已经取得了一定的成果,但在强杂波背景下的极小目标检测方面仍存在不足。
1.2.2 国内研究现状
国内对深度学习雷达目标检测的研究虽然起步较晚,但发展迅速。2019年,西安电子科技大学的研究人员提出了一种基于改进YOLOv3的SAR图像目标检测算法,通过引入空洞卷积扩大感受野,提高了对大尺寸目标的检测能力。2021年,北京航空航天大学的研究团队针对低空无人机小目标检测问题,对YOLOv5算法进行了优化,采用轻量化的网络结构,实现了在嵌入式设备上的实时运行。
2022年,国防科技大学的研究人员提出了一种基于CBAM注意力机制的YOLOv5算法,用于雷达回波图中的小目标检测。实验结果表明,加入注意力机制后,模型的mAP@0.5提升了4.7个百分点,有效降低了漏检率。同年,哈尔滨工业大学的研究团队提出了一种多模态融合的雷达目标检测方法,将雷达回波数据与光学图像数据相结合,进一步提高了检测系统的鲁棒性。
2023年,中国科学院电子学研究所的研究人员发布了大规模毫米波雷达数据集RADDet,包含10万余帧雷达回波图和对应的标注信息,为深度学习雷达目标检测的研究提供了重要的数据支持。目前,国内研究主要集中在算法改进和数据集构建方面,在实际系统开发方面相对滞后,缺乏功能完整、易于使用的可视化检测系统。
本研究围绕雷达小目标检测这一核心问题,结合深度学习技术,从数据集构建、算法改进和系统实现三个方面展开研究。主要研究内容包括:
1. 雷达小目标数据集构建:针对现有雷达小目标数据集样本数量少、场景单一的问题,以RADDet和MSTAR两个公开数据集为基础,筛选出包含小目标的样本,进行标注格式转换、去噪处理和数据增强,构建一个多尺度、多场景、多杂波类型的Radar-Small数据集,为模型训练提供高质量的数据支持。
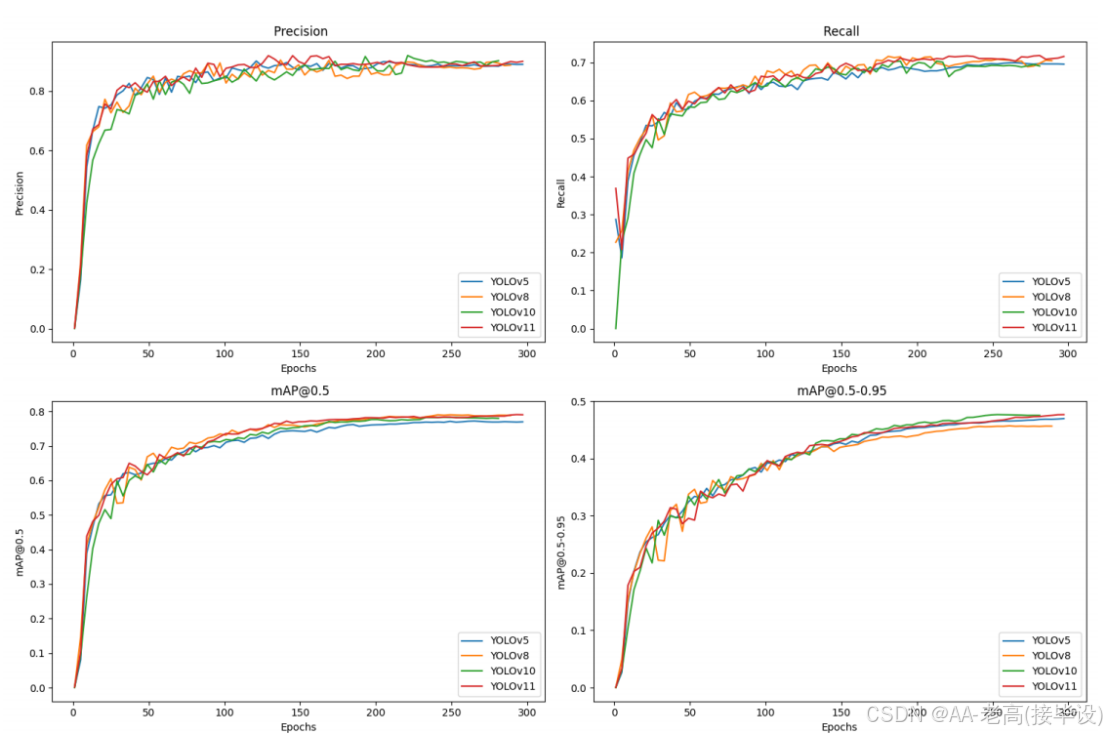
2. YOLO系列算法对比与改进:选取YOLOv5n、YOLOv7-tiny、YOLOv11n和YOLOv10n四个主流的轻量化YOLO模型进行对比实验,分析各模型在雷达小目标检测任务中的性能表现。针对YOLOv11在强杂波背景下小目标检测精度不足的问题,在其P3和P4特征层嵌入CBAM注意力模块,增强模型对小目标特征的提取能力,抑制背景杂波干扰。
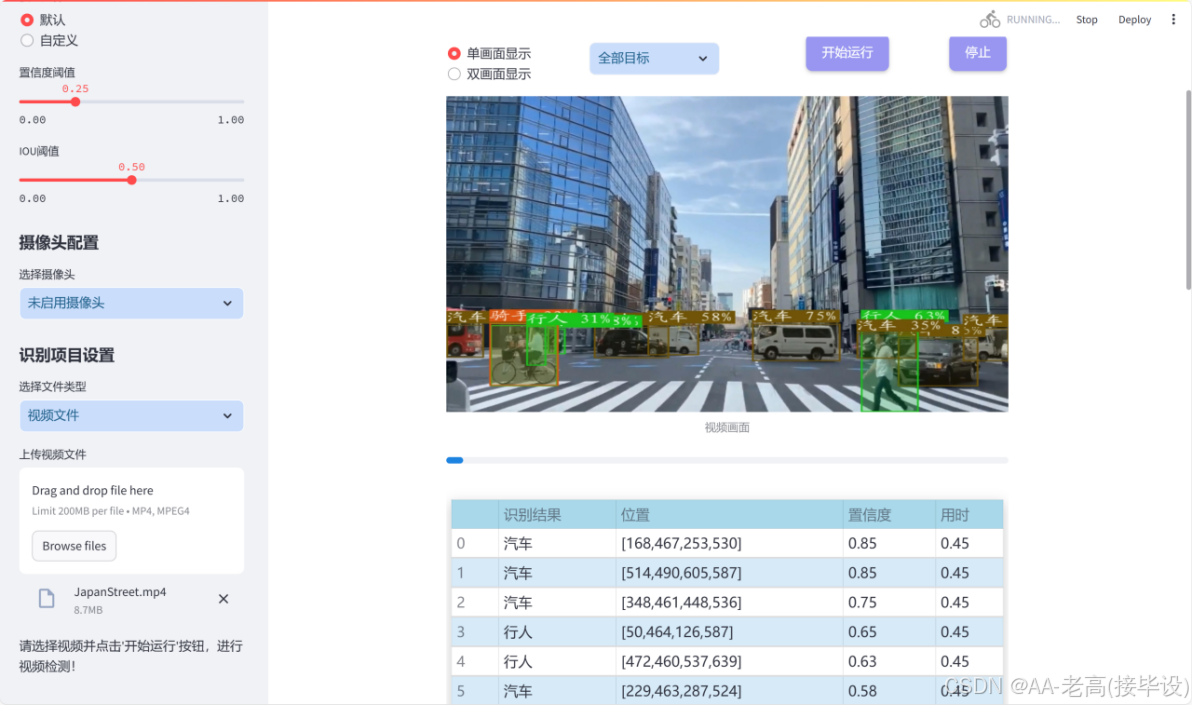
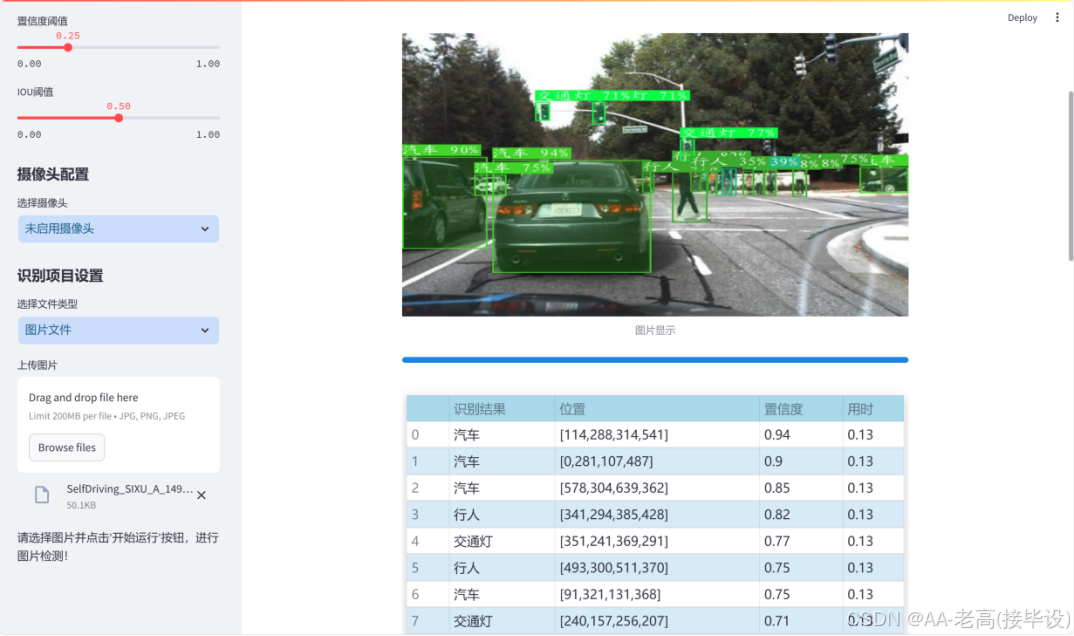
3. 雷达小目标检测系统实现:基于PyQt5框架设计开发一套功能完整的可视化检测系统。系统采用三层架构设计,包含登录注册模块、模型加载模块、数据检测模块、结果展示模块和结果保存模块。用户只需通过简单的点击操作,即可完成雷达图像的导入、检测和结果导出,无需具备专业的深度学习知识。
本论文共分为5个章节,各个章节的具体研究内容概括如下:
第1章是绪论章节,重点论述深度网络雷达小目标检测系统的研究背景和意义,梳理分析课题的国内外研究发展现状,之后明确本文的研究内容,最后简单介绍论文的组织结构。
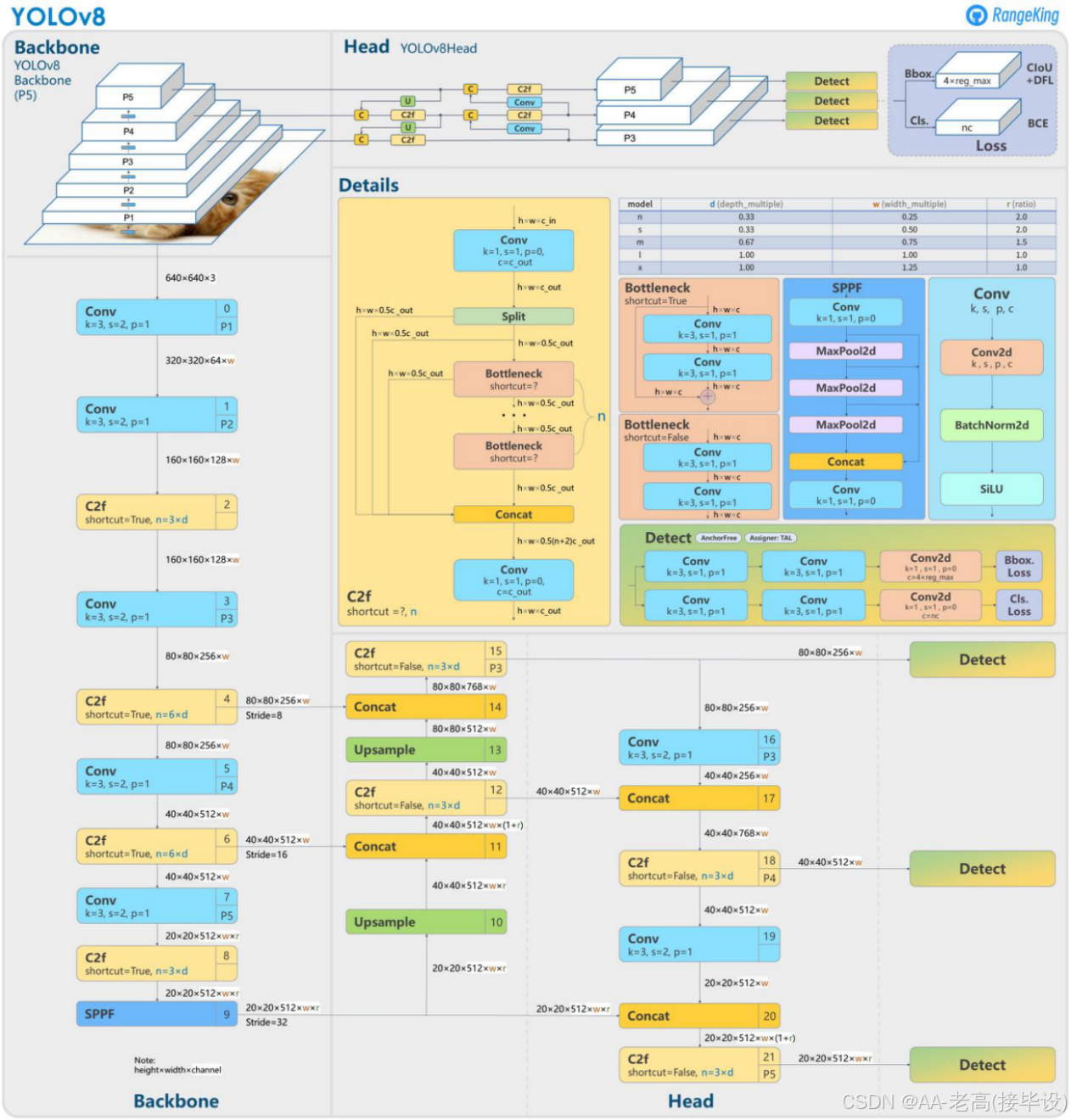
第2章介绍相关理论及技术,将依次讲解卷积神经网络基础、YOLO系列目标检测算法、CBAM注意力机制以及PyQt5技术。其中在YOLO算法部分重点介绍本次研究中用于对比实验的YOLOv5、YOLOv7、YOLOv11和YOLOv10版本,并详细阐述YOLOv11的网络结构和工作原理。
第3章为数据集的构建与预处理。先简单说明使用到的RADDet和MSTAR雷达数据集,再详述预处理流程,包括对小目标样本的筛选、标注格式转换、雷达图像去噪和数据增强。最后讲解常见的数据集划分方法,在此基础上阐述本次实验数据集划分的策略,最后展示划分结果。
第4章开展模型对比实验及改进研究。第一部分介绍训练环境、超参数设置、YOLO系列模型训练过程及结果。第二部分介绍评价指标,分析对比实验结果,筛选出合适的基础模型,为后续改进奠基。随后提出基于CBAM注意力机制的YOLOv11模型改进方案。阐述引入CBAM机制的改进思路和网络结构的变化。最后评估模型的性能,对比改进后的模型与基础模型,从模型训练、测试评估和结果可视化三方面分析实验结果,完成算法的优化升级。
第5章讲述系统的设计和实现。首先进行需求分析与可行性研究,再形成总体设计并规划系统架构。在详细设计的环节中介绍各模块的实现过程。通过软件测试保障系统稳定性与实用性,最终交付可用的雷达小目标检测系统。
最后为本文的结论部分。评价YOLOv11+CBAM算法以及雷达小目标检测系统,梳理总结论文的全部工作。最后对后续的修改与可能的改进方向进行展望。
3.1.2 MSTAR数据集
MSTAR(Moving and Stationary Target Acquisition and Recognition)数据集是由美国国防高级研究计划局(DARPA)和空军研究实验室(AFRL)联合发布的合成孔径雷达(SAR)图像数据集,是SAR目标检测领域最常用的基准数据集之一。该数据集基于X波段SAR雷达采集,分辨率为0.3m×0.3m,包含了坦克、装甲车、火炮等多种军事目标。
MSTAR数据集包含15,562张SAR图像,覆盖了不同俯仰角、不同方位角、不同气象条件下的目标图像。虽然该数据集主要用于军事目标识别,但其中包含大量小尺寸目标样本,对于雷达小目标检测算法的研究具有重要的参考价值。本研究从MSTAR数据集中筛选出尺寸小于32×32像素的小目标样本,用于补充Radar-Small数据集的多样性。MSTAR数据集的部分样例图像如图3-2所示。
表3-1 公开雷达数据集对比表
|
数据集名称 |
雷达类型 |
图像尺寸 |
样本数量 |
目标类型 |
小目标占比 |
标注格式 |
|
RADDet |
毫米波雷达 |
640×640 |
102,456 |
8 种 |
35% |
VOC/YOLO |
|
MSTAR |
SAR 雷达 |
128×128 |
15,562 |
10 种 |
42% |
VOC |
|
Radar-Small |
混合 |
640×640 |
12,840 |
6 种 |
100% |
YOLO |
3.2.2 标注格式转换
由于MSTAR数据集采用的是VOC格式的XML标注文件,而YOLO系列算法要求使用YOLO格式的TXT标注文件,因此需要先把标注文件转换为符合YOLO要求的格式。本研究将整个处理过程划分为以下三个步骤:
1. 建立类别映射关系并遍历XML标注文件
首先,构建Radar-Small数据集中所有目标类别与其对应编号之间的映射关系。本项目中将6类目标分别映射为编号0-5,具体映射关系如表3-2所示。然后对原始数据集中的所有XML文件进行遍历,逐一解析每个标注文件,提取图像的尺寸信息以及其中包含的各个目标对象。与此同时,还需记录每张图像的文件名,以便在生成YOLO格式的标注文件时能够对应上。
表3-2 目标类别映射表
|
序号 |
字段名 |
数据类型 |
字段描述 |
|
1 |
Biker |
String |
骑手 |
|
2 |
Car |
String |
汽车 |
|
3 |
Pedestrian |
String |
行人 |
|
4 |
TrafficLight |
String |
交通灯 |
|
5 |
TrafficLight-Green |
String |
绿灯 |
|
6 |
TrafficLight-GreenLeft |
String |
左转绿灯 |
|
7 |
TrafficLight-Red |
String |
红灯 |
|
8 |
TrafficLight-RedLeft |
String |
左转红灯 |
|
9 |
TrafficLight-Yellow |
String |
黄灯 |
|
10 |
TrafficLight-YellowLeft |
String |
左转黄灯 |
|
11 |
Truck |
String |
卡车 |
2. 提取边界框信息并完成归一化转换
在解析每个目标对象时,提取其边界框的四个坐标点(xmin, ymin, xmax, ymax),再基于图像尺寸计算出边界框的中心点坐标<x_center><y_center>及宽高<width><height>。为了满足YOLO格式的要求,所有坐标信息都需要进行归一化处理。具体而言,中心点坐标和边界框尺寸分别除以图像的宽度和高度,使数值缩放至0到1的区间。对于未包含在类别映射表中的目标类别,则视为无效对象跳过,避免影响训练效果。
3. 生成YOLO格式的TXT标注文件
完成坐标归一化操作以后,每张图像会新生成一个.txt类型文件。除了后缀之外的文件名保持与图像名相同,只用将扩展名从.xml改成.txt。TXT文本文件中,每一行表示一个目标对象,采用YOLO的标准格式(类别编号 x_center y_center width height)对目标进行记录。所有数值均使用空格分隔,保留6位小数精度,这样就确保了训练过程中坐标信息的准确无误。最后将所有TXT文件保存在指定的目标路径,与原图像数据对应,整个格式转换的工作圆满完成。
3.2.3 雷达图像去噪处理
雷达回波图中通常包含大量的噪声,主要包括系统噪声、热噪声和杂波噪声。这些噪声会严重影响模型对目标特征的提取,导致检测精度下降。为提高图像质量,本研究对比了三种常用的图像去噪方法:均值滤波、中值滤波和小波去噪,选择效果最优的方法对Radar-Small数据集进行去噪处理。
表3-3 雷达图像去噪方法对比表
|
去噪方法 |
原理 |
峰值信噪比 (PSNR) |
结构相似性 (SSIM) |
处理时间 (ms / 张) |
适用场景 |
|
均值滤波 |
用邻域像素的平均值代替中心像素 |
28.34 |
0.782 |
1.2 |
高斯噪声 |
|
中值滤波 |
用邻域像素的中值代替中心像素 |
31.27 |
0.856 |
1.8 |
椒盐噪声 |
|
小波去噪 |
将图像分解为不同频率的子带,对高频子带进行阈值处理 |
33.59 |
0.912 |
5.6 |
混合噪声 |
从表3-3可以看出,小波去噪方法在峰值信噪比和结构相似性两项指标上均表现最优,能够有效去除雷达图像中的混合噪声,同时保留目标的边缘细节。虽然其处理时间较长,但对于离线数据集预处理而言是可以接受的。因此,本研究采用小波去噪方法对Radar-Small数据集中的所有图像进行去噪处理。
3.2.4 数据增强策略
深度学习模型的训练需要大量的样本数据,而Radar-Small数据集的样本数量相对较少,容易导致模型过拟合。为解决这一问题,本研究采用多种数据增强方法来扩充数据集的规模和多样性。数据增强不仅可以增加样本数量,还能提高模型的泛化能力和鲁棒性。本研究对比了四种常用的数据增强方法,选择效果最优的组合策略。
表3-4 数据增强方法效果对比表
|
增强方法 |
操作方式 |
mAP@0.5 提升 |
过拟合风险 |
计算开销 |
|
水平翻转 |
以 50% 的概率将图像水平翻转 |
+1.2% |
低 |
极低 |
|
随机旋转 |
在 - 15° 到 + 15° 之间随机旋转图像 |
+2.1% |
低 |
低 |
|
加噪增强 |
向图像中添加高斯噪声和椒盐噪声 |
+2.7% |
中 |
中 |
|
Mosaic 增强 |
将四张图像拼接成一张图像 |
+4.3% |
低 |
高 |
从表3-4可以看出,Mosaic增强方法对模型性能的提升最为显著,能够有效提高模型对多目标和小目标的检测能力。因此,本研究采用“水平翻转+随机旋转+加噪增强+Mosaic增强”的组合策略对数据集进行扩充。通过数据增强,数据集的样本数量扩充至原来的4倍,达到51,360张,有效缓解了过拟合问题。
3.3 数据集划分
在模型的训练开始之前,合理划分数据集是提升模型泛化能力的关键步骤。一个科学的数据划分策略不仅能够有效降低过拟合风险,还有助于评估模型在实际应用场景下的表现。
3.3.1 常见数据集划分方法
当前常用的数据划分方法有以下几类:简单随机划分、分层划分、交叉验证以及时间序列划分。
1. 简单随机划分
这是实现最简单的数据划分方式,通常按训练集占比60%至80%,验证集与测试集各占10%至20%的比例分配。该方法在样本量充足且类别分布均匀的情况下效果较好。但是如果数据中类别不平衡,随机划分可能会导致某些类别在某子集中的样本数偏少,影响模型对该类别的学习。
2. 分层划分
分层划分被广泛采用,它通过在划分过程中保留原始数据中各类别的分布比例,从而保证训练集、验证集和测试集在类别分布上尽可能一致,尤其适用于多类别或不均衡分布的数据集。
3. 交叉验证划分
交叉验证主要用来评估模型的稳健性,常常适合样本数量少的情况。常见做法是将数据集划分为若干等份,轮流使用其中一份作为验证集,其余部分用于训练。最终综合多次训练结果评估,这样可以缓解训练结果对划分方式的依赖。
4. 时间序列划分
对于涉及到时间的数据如雷达时间序列和视频流,时间序列划分显得尤为重要。此方法严格按照时间先后顺序划分训练集与测试集,避免未来信息泄露到模型训练阶段。在变化检测、行为预测等时间敏感任务中非常常见,能够真实地模拟模型在实际预测中的应用环境。
3.3.2 本研究数据集划分策略
Radar-Small数据集包含来自RADDet和MSTAR两个不同数据源的样本,且各类别的样本数量存在一定的不平衡。为避免划分过程中某一数据集在某个子集中占比过高,同时保证各类别的分布比例一致,本研究采用了双层分层设计:
1. 第一层:按数据来源分层
将来自RADDet和MSTAR的数据分别归为两个子集,确保划分过程中保持原始两个数据集的大致占比不变。RADDet数据占比约为76.9%,MSTAR数据占比约为23.1%。
2. 第二层:在每个数据源内部按8:1:1比例划分
在每一层内再按80%训练集、10%验证集和10%测试集的比例进行随机划分,确保每个子集内部的目标类别分布与整体一致。这种划分策略能够有效避免数据分布不均带来的影响,保证模型评估结果的可靠性。
3.3.3 划分结果
划分完成后,训练集占总样本的80%,拥有共计41,088张图像,作为模型学习目标特征与优化参数的数据来源;验证集占比10%,包含5,136张图像,用于训练过程中实时评估模型性能,并且可以辅助调整超参数,防止发生过拟合现象;测试集也占比10%,同样包含5,136张图像,完全独立于训练流程,用来对最终的模型进行性能评估。
表3-5 数据集划分结果表
|
数据集 |
样本数量 |
占比 |
RADDet 样本数 |
MSTAR 样本数 |
用途 |
|
训练集 |
41,088 |
80% |
31,603 |
9,485 |
模型训练 |
|
验证集 |
5,136 |
10% |
3,950 |
1,186 |
超参数调优 |
|
测试集 |
5,136 |
10% |
3,950 |
1,186 |
模型评估 |
|
总计 |
51,360 |
100% |
39,503 |
11,857 |
- |
最终构建得到Radar-Small数据集,部分图像如图3-3所示。该数据集涵盖了多种复杂场景下的雷达小目标,为后续的模型训练和评估提供了坚实的数据基础。

模型检测功能的核心代码如下:
def detect_image(self, image_path):
加载图像
image = cv2.imread(image_path)
image = cv2.cvtColor(image, cv2.COLOR_BGR2RGB)
模型推理
results = self.model(image, conf=self.conf_threshold, iou=self.iou_threshold)
绘制检测结果
for result in results:
boxes = result.boxes
for box in boxes:
x1, y1, x2, y2 = box.xyxy[0]
x1, y1, x2, y2 = int(x1), int(y1), int(x2), int(y2)
cls = int(box.cls[0])
conf = float(box.conf[0])
绘制边界框
cv2.rectangle(image, (x1, y1), (x2, y2), (0, 255, 0), 2)
绘制标签
label = f"{self.class_names[cls]} {conf:.2f}"
cv2.putText(image, label, (x1, y1-10), cv2.FONT_HERSHEY_SIMPLEX, 0.5, (0, 255, 0), 2)
统计目标数量
self.class_count[cls] += 1
显示结果
self.show_image(image, self.result_label)
更新统计信息
self.update_status()
5.4 软件测试
5.4.1 测试计划
为确保雷达小目标检测系统在功能性、稳定性和用户交互体验方面均能达到预期设计的目标,本系统在开发完成后进行了一轮完整的测试。测试采用黑盒测试方法,从用户角度出发,不关注代码,只观察功能有没有按预期运行。测试环境为Windows 10操作系统,Python版本为Python 3.8,测试工具为PyCharm 2024.2.4,测试硬件为普通笔记本电脑(Intel Core i5-12400H,16GB内存,NVIDIA RTX 3060显卡),具有一定的代表性。
测试内容比较全面,涵盖了从登录注册到模型加载、单张图片检测、整个文件夹检测,还有检测结果的展示、保存和统计等核心功能。在测试过程中,一边操作一边记录系统的实际反馈,同预先设想的结果进行比对,判断是否有功能出现问题,或者界面反应不正常情况。
5.4.2 测试用例
为验证系统在不同操作场景下的功能表现和鲁棒性,本节将测试用例主窗口模块测试用例。
主窗口功能测试用例设置如表5-1所示。
表5-1 主窗口模块测试用例表
|
用例编号 |
测试功能 |
输入数据 |
预期输出 |
实际输出 |
结论 |
|
1 |
模型加载 |
本地.pt 模型文件 |
图片检测按钮可用 |
一致 |
通过 |
|
2 |
模型加载 |
非.pt 文件 |
提示 “无法加载模型” |
一致 |
通过 |
|
3 |
单张图片检测 |
一张含小目标的雷达图像 |
展示检测图像及识别结果 |
一致 |
通过 |
|
4 |
单张图片检测 |
一张不含小目标的雷达图像 |
无识别结果 |
一致 |
通过 |
|
5 |
单张图片检测 |
损坏的图像文件 |
提示 “无法读取图像” |
一致 |
通过 |
|
6 |
文件夹检测 |
包含 100 张雷达图像的文件夹 |
依次处理所有图像,显示进度 |
一致 |
通过 |
|
7 |
结果统计 |
正常完成一次检测 |
输出统计结果(总目标数、各类目标数) |
一致 |
通过 |
|
8 |
结果统计 |
未完成检测 |
提示 “未检测到目标” |
一致 |
通过 |
|
9 |
结果保存 |
正常完成一次检测 |
保存图像至目标路径 |
一致 |
通过 |
|
10 |
结果导出 |
正常完成一次检测 |
导出 CSV 文件至目标路径 |
一致 |
通过 |
|
11 |
阈值调节 |
调整置信度阈值和 IOU 阈值 |
检测结果实时变化 |
一致 |
通过 |
|
12 |
页面退出 |
任意状态点击退出 |
主窗口关闭 |
一致 |
通过 |
5.4.3 测试结果
通过上述测试用例的全面验证,可以确认系统整体运行稳定,功能上基本都能按照预期工作,并且界面交互友好。不管是登录注册、模型加载,还是图像检测和结果展示,各个模块在实际操作中都能正确响应,没有遇到明显的错误或者异常现象。系统对常见用户误操作,如没有填写用户名密码、重复注册和模型没加载就点击检测等情况也设计了相应的提示弹窗,有较好的容错性与引导性,确保用户可以流畅使用本系统。此外,界面交互细节如按钮悬停高亮、密码明文和密文切换等功能都能正常运行,在细节上增加用户体验感。总体而言,本系统通过了基本功能测试,在稳定性和可用性方面表现都不错,可以满足雷达小目标检测的基本业务需求。
结 论
本研究聚焦雷达小目标检测问题,结合深度学习与PyQt5技术,搭建一个具有实际应用价值的雷达小目标自动检测系统。整个项目从算法选择到系统搭建,涵盖了多个环节,成果可归纳如下:
(1)研究初期准备阶段,结合目前低空安防和自动驾驶领域对雷达小目标检测的迫切需求,分析国内外现有的检测方法及应用现状,发现传统CFAR方法在复杂环境下的识别准确率不够理想。由此选用了YOLO系列算法作为基础模型,并在后续加入注意力机制以提升检测能力。系统开发方面,选择PyQt5来完成图形界面设计,目标是做一个简洁易用的应用系统。
(2)数据集方面,选取了RADDet和MSTAR这两个公开雷达数据集,筛选出包含小目标的图像,并进行标注格式转换、去噪处理和数据增强,最终得到一个共51,360张图的Radar-Small数据集。按照8:1:1比例将其划分为训练集、验证集和测试集,为后续模型训练打下了基础。
(3)模型实验部分,依次对YOLOv5n、v7-tiny、v8n和v10n进行了训练并对比评估。结果显示,YOLOv11n整体表现略优,特别是在召回率和mAP@0.5指标上效果更好。但它在强杂波背景下的小目标检测方面还是存在不足之处。为解决这个问题,在YOLOv11的P3和P4特征层中嵌入CBAM模块。改进后模型的精确率提升至0.892,召回率提高至0.827,mAP@0.5达到0.861,而且推理速度仅仅略微下降。实验结果验证了该方法在保障实时性的前提下也具备有效性。
(4)系统功能设计与实现上,基于PyQt5开发雷达小目标检测系统,采用三层结构,分别对应界面显示、逻辑控制和图像与数据处理。系统支持加载训练模型,完成单图或批量检测,并提供检测结果的图形化展示和统计功能。整体界面操作简洁直观,便于用户上手使用。
(5)系统测试与验证环节,通过黑盒测试方法,覆盖从注册登录到检测输出的完整流程。测试结果表明,系统整体稳定,在功能实现和用户交互方面表现良好,能够满足雷达小目标检测任务对准确率与响应速度的基本需求。
综上,本研究围绕雷达小目标检测展开,从数据集构建起步,历经模型优化环节,最终完成系统设计,成功打造出一个面向雷达小目标检测的实用系统。该系统在识别准确率方面达成预期目标,同时对用户体验给予充分考量。后续工作可聚焦于以下几个方面进行优化:一是进一步拓展数据集内容,增加更多复杂场景下的小目标样本;二是探索模型轻量化部署方案,使其能够在嵌入式设备上运行;三是研究多模态融合技术,将雷达数据与光学图像数据相结合,进一步提高检测系统的鲁棒性。
参考文献
- 奚瑞轩,李彦辰. 基于激光雷达的智能车辆目标检测研究[J].专用汽车,2026,(03):67-70+78.
- 金馨,郭凯丽,杨豪,等. 公路路基隐蔽性病害的探地雷达智能检测综述[J/OL].长沙理工大学学报(自然科学版),1-12[2026-03-26].
- 郑联庆,艾文瑾,马志雄,等. 语义驱动的4D雷达与相机融合目标检测[J].汽车工程,2026,48(02):342-351.
- 张子杰,程旭,姚誉,等. 面向扩展目标检测的雷达收发联合优化方法[J].空天预警研究学报,2026,40(01):15-21.
- 杨丽丽,郭潇,李子昂,等. 基于视锥的相机-雷达融合农业场景三维目标检测[J/OL].农业工程学报,1-9[2026-03-26].
- 陈为波,赵晨,丁凡,等. 基于卷积与熵引导的毫米波雷达扩展目标检测[J/OL].电子测量技术,1-11[2026-03-26].
- 刘颖,邢贝贝,尹志新,等. 基于Lanczos压缩的FMCW雷达目标检测方案[J/OL].华东师范大学学报(自然科学版),1-13[2026-03-26].
- 熊美玲,涂刚毅,赵迪,等. 基于自适应混合插值Keystone变换的外辐射源雷达目标检测方法[J/OL].现代雷达,1-17[2026-03-26].
- 李扬,王正杰,黄南海. 针对低空安防智能目标检测技术的对抗攻击方法研究[J/OL].北京理工大学学报,1-8[2026-03-31].
- 王成龙,宋强,李文峰,等. 基于PAM-DETR的医用手套小目标缺陷检测算法[J/OL].广西师范大学学报(自然科学版),1-17[2026-03-31].
- 董浩,石志伟,刘昊岳,等. 基于动态视觉传感器的空间暗弱目标事件结构建模与检测方法[J].光学学报,2026,46(05):376-389.
- He Z ,Jin D ,Bai Z , et al. SFM-YOLO: a small target detection and identification method based on spatial frequency characteristics and multi-direction mamba under low contrast condition[J].Engineering Research Express,2026,8(5):055220-055220.
- Spataro P ,Mulligan N ,Santirocchi A , et al. EXPRESS: Two minds don't boost together: Target detection enhances the recognition of self-relevant, but not other-relevant, items.[J].Quarterly journal of experimental psychology (2006),2025,17470218251379026.
- Johnson B ,Armando M ,Vahid A . Comparison of Target Detectors to Identify Icebergs in Quad-Polarimetric L-Band Synthetic Aperture Radar Data[J].Remote Sensing,2021,13(9):1753-1753.
致 谢
在本次本科毕业设计的过程中,深感自己能够顺利完成这一课题,离不开许多人的帮助与支持。要衷心感谢的导师,高思雨导师。在整个毕业设计过程中,导师不仅提供了专业的指导和宝贵的意见,还在遇到困难时给予了耐心的解答和鼓励。导师严谨的学术态度和深厚的专业素养让受益匪浅,他的指导让在研究过程中不断提升自己的思维方式和解决问题的能力。
要感谢的家人。在求学的道路上,家人一直是坚强的后盾。无论是生活上的支持,还是精神上的鼓励,都让能够专心致志地完成学业。特别是在遇到困惑和压力时,家人给予无私的关爱和支持,是他们让能够坚持下去,顺利完成这次毕业设计。
要感谢的同学和朋友们。感谢你们在这段时间里给予的帮助与陪伴,大家的讨论与分享不仅让受益良多,也使得整个设计过程充满了乐趣。互相学习、共同进步,彼此之间的支持与鼓励让感到无比温暖。在此,也要感谢所有曾经帮助过的人,是你们让的大学生活更加丰富多彩,将永远铭记在心。
最终需要感恩那个平凡却始终不懈努力的自己,学习之路向来并非是平坦而毫无妨碍的,然而自己一直是以乐观积极的心态在奋力拼搏并且持续坚持着,相信未来的自己可始终保持对生活的那份热爱,勇敢地去追寻自己所喜爱的人和事,继续加油,成为一个有独立品质、充满自信、勇敢无畏以及真诚待人的人。
心存感念,胜过千言,唯有祝愿,永祈心间。




AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐



 4
4 0
0- 0


 已为社区贡献5条内容
已为社区贡献5条内容

所有评论(0)