A-LOAM完整详细解读
0. A-LOAM 整体运行链路
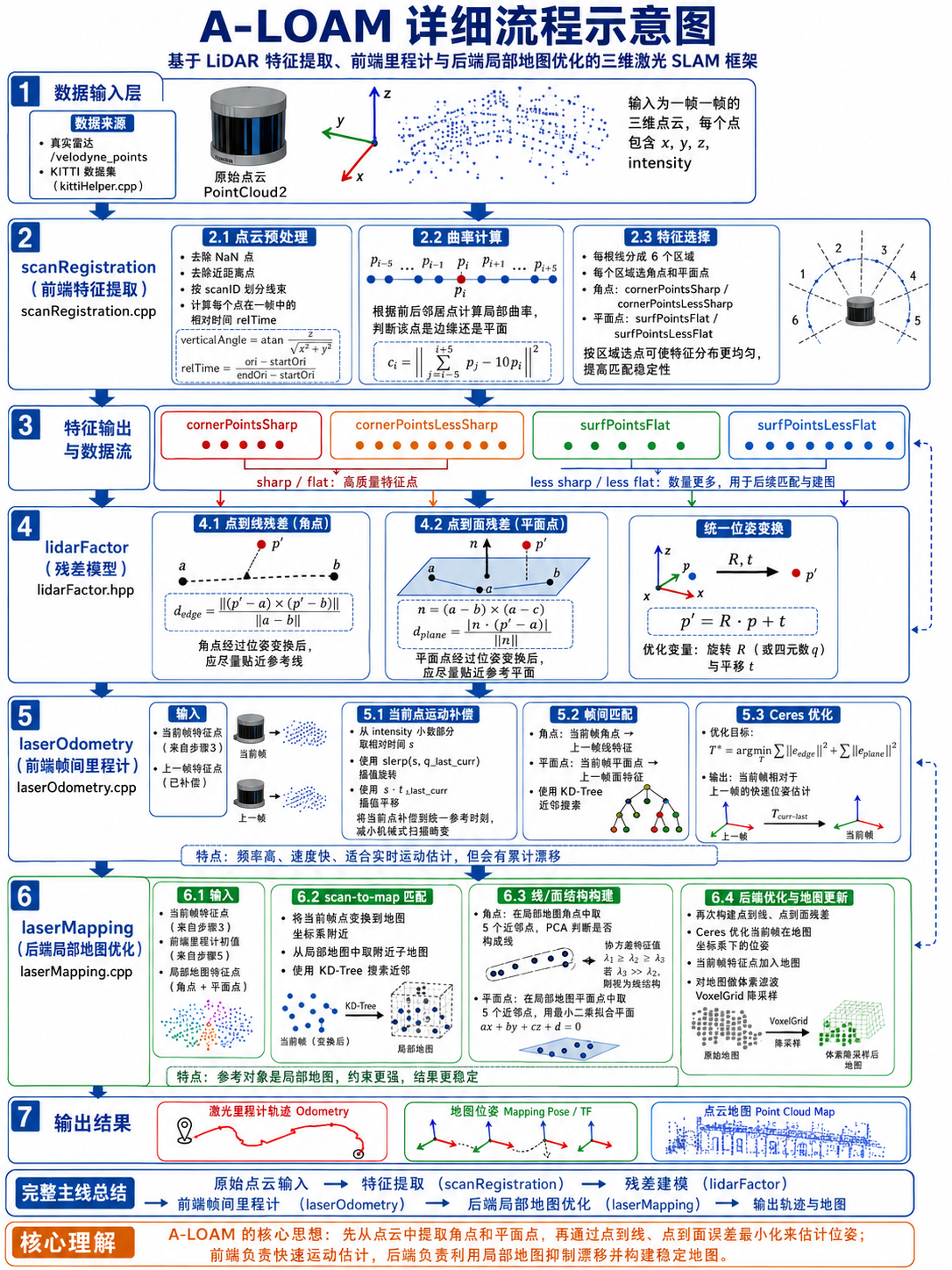
A-LOAM 本质是一个 纯 3D LiDAR 特征点 SLAM。它不是直接拿整帧点云硬匹配,而是先提取角点和平面点,再用几何误差优化位姿。
完整链路如下:
原始点云
↓
scanRegistration.cpp
提取角点和平面点
↓
lidarFactor.hpp
定义点到线、点到面误差
↓
laserOdometry.cpp
当前帧 vs 上一帧,估计快速里程计
↓
laserMapping.cpp
当前帧 vs 局部地图,优化地图位姿
↓
发布轨迹、TF、点云地图可以这样记:
scanRegistration:负责“选点”
lidarFactor:负责“误差怎么算”
laserOdometry:负责“短时间怎么动”
laserMapping:负责“在地图里怎么对齐”1. 数据输入层:kittiHelper.cpp
1.1 这个文件干什么?
kittiHelper.cpp 不是核心 SLAM 算法,它主要用于跑 KITTI 数据集。因为 KITTI 的点云一般是 .bin 文件,而 A-LOAM 正常处理的是 ROS 点云话题。
所以它的作用是:
读取 KITTI .bin 文件
↓
解析 x、y、z、intensity
↓
转成 PCL 点云
↓
转成 ROS PointCloud2
↓
发布成 /velodyne_points如果你用真实雷达跑 A-LOAM,这个文件可以先不重点看,因为真实雷达驱动会直接发布点云。
1.2 关键代码逻辑
std::ifstream input(filename.c_str(), std::ios::binary);
pcl::PointCloud<PointType>::Ptr laserCloud(new pcl::PointCloud<PointType>);
while (!input.eof())
{
float x, y, z, intensity;
input.read((char*)&x, sizeof(float));
input.read((char*)&y, sizeof(float));
input.read((char*)&z, sizeof(float));
input.read((char*)&intensity, sizeof(float));
PointType point;
point.x = x;
point.y = y;
point.z = z;
point.intensity = intensity;
laserCloud->push_back(point);
}
sensor_msgs::PointCloud2 laserCloudMsg;
pcl::toROSMsg(*laserCloud, laserCloudMsg);
laserCloudMsg.header.frame_id = "camera_init";
pubLaserCloud.publish(laserCloudMsg);这段代码很好理解。
input.read() 每次从 .bin 文件里读取一个 float。KITTI 点云里一个点一般由四个 float 组成:
x, y, z, intensity其中:
x、y、z:
点在雷达坐标系下的三维坐标。
intensity:
反射强度。读取完之后,把点放进 PCL 点云:
laserCloud->push_back(point);然后通过:
pcl::toROSMsg(*laserCloud, laserCloudMsg);把 PCL 点云转成 ROS 点云消息,最后发布出去。
这个文件只解决“数据怎么进系统”的问题,真正前端从 scanRegistration.cpp 开始。
2. 前端一:scanRegistration.cpp
2.1 这个文件干什么?
scanRegistration.cpp 是 A-LOAM 前端的第一步,负责 点云预处理和特征提取。
它输入原始点云,输出四类特征点:
cornerPointsSharp:
最尖锐角点,数量少,质量高。
cornerPointsLessSharp:
次尖锐角点,数量更多。
surfPointsFlat:
最平坦平面点,数量少,质量高。
surfPointsLessFlat:
次平面点,数量更多,通常会降采样。这个文件的核心逻辑是:
原始点云
↓
去无效点、去近点
↓
按垂直角度分线束
↓
计算点在一帧中的相对时间
↓
按扫描线重新排列点云
↓
计算曲率
↓
根据曲率选角点和平面点
↓
发布特征点云2.2 去掉太近的点
先看一个基础预处理:去除距离太近的点。
void removeClosedPointCloud(
const pcl::PointCloud<PointType>& cloud_in,
pcl::PointCloud<PointType>& cloud_out,
float min_range)
{
cloud_out.clear();
for (int i = 0; i < cloud_in.points.size(); ++i)
{
PointType p = cloud_in.points[i];
float dis2 = p.x * p.x + p.y * p.y + p.z * p.z;
if (dis2 < min_range * min_range)
continue;
cloud_out.push_back(p);
}
}这里计算的是点到雷达原点的距离平方:
dis² = x² + y² + z²如果:
dis² < min_range²说明点太近,直接丢掉。
为什么不写成:
dis = sqrt(x² + y² + z²)因为开根号更耗时。比较距离大小时,直接比较平方就够了。
太近点通常可能来自:
车体
雷达外壳
安装支架
近距离噪声
异常反射点这些点不代表稳定环境结构,保留下来会影响后面曲率计算。
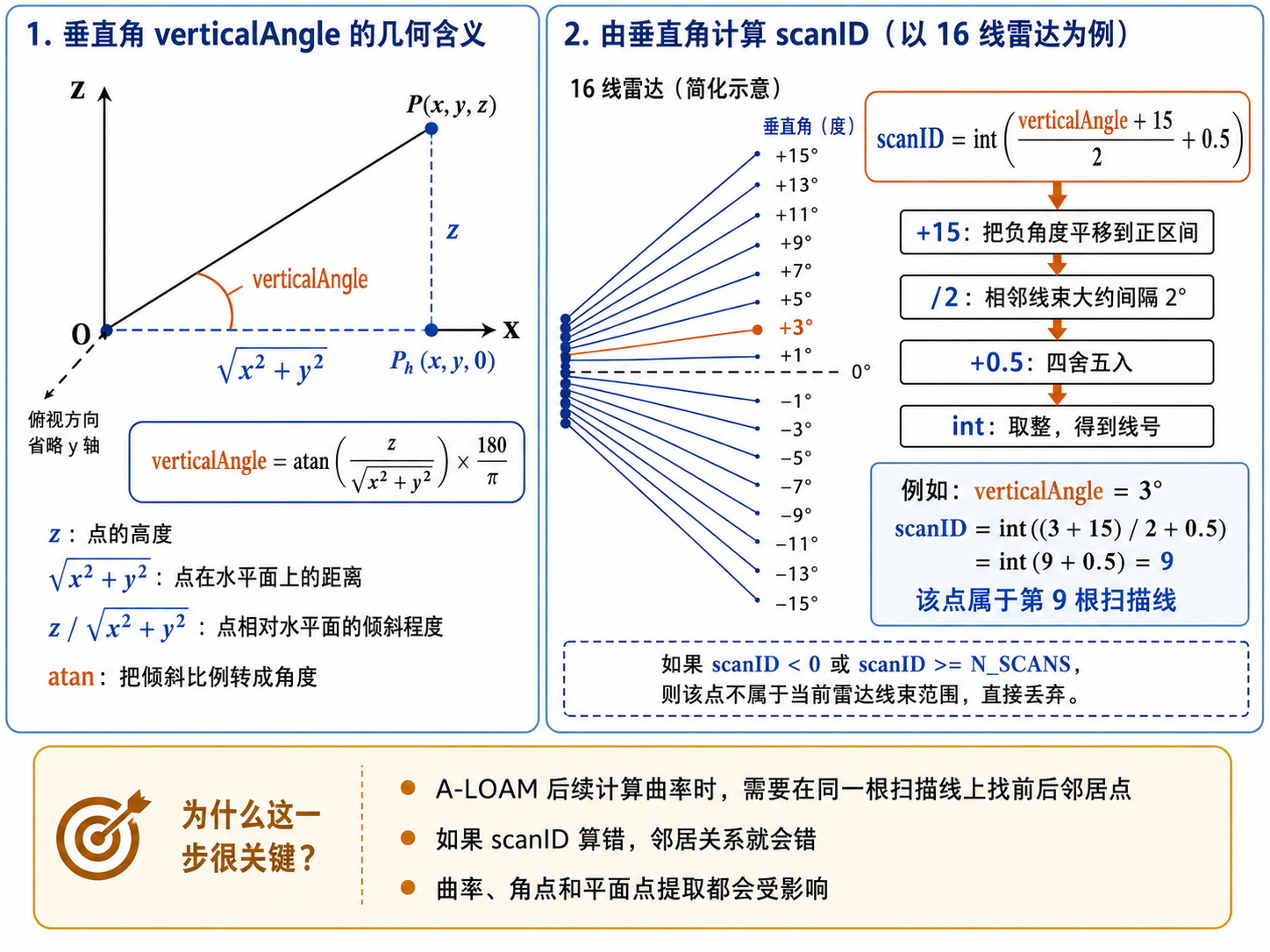
2.3 根据垂直角度计算 scanID
多线雷达的点来自不同线束。A-LOAM 需要知道每个点属于第几根线,因为后面计算曲率时,要找同一根线上的前后邻居点。
关键代码:
float verticalAngle =
atan(point.z / sqrt(point.x * point.x + point.y * point.y))
* 180.0 / M_PI;
int scanID = int((verticalAngle + 15) / 2 + 0.5);
if (scanID < 0 || scanID >= N_SCANS)
continue;公式是:
verticalAngle = atan(z / sqrt(x² + y²))其中:
z:
点的高度。
sqrt(x² + y²):
点在水平面上的距离。
z / sqrt(x² + y²):
点相对于水平面的倾斜程度。
atan:
把倾斜比例转成角度。然后:
scanID = int((verticalAngle + 15) / 2 + 0.5)这一般针对 16 线雷达的角度分布来理解:
+15:
把负角度平移到正区间。
/2:
相邻线束大约间隔 2 度。
+0.5:
四舍五入。
int:
变成整数线号。这一步非常关键。因为如果 scanID 算错,点就会被放到错误的扫描线里,后面的前后邻居也会错,曲率和特征点都会错。
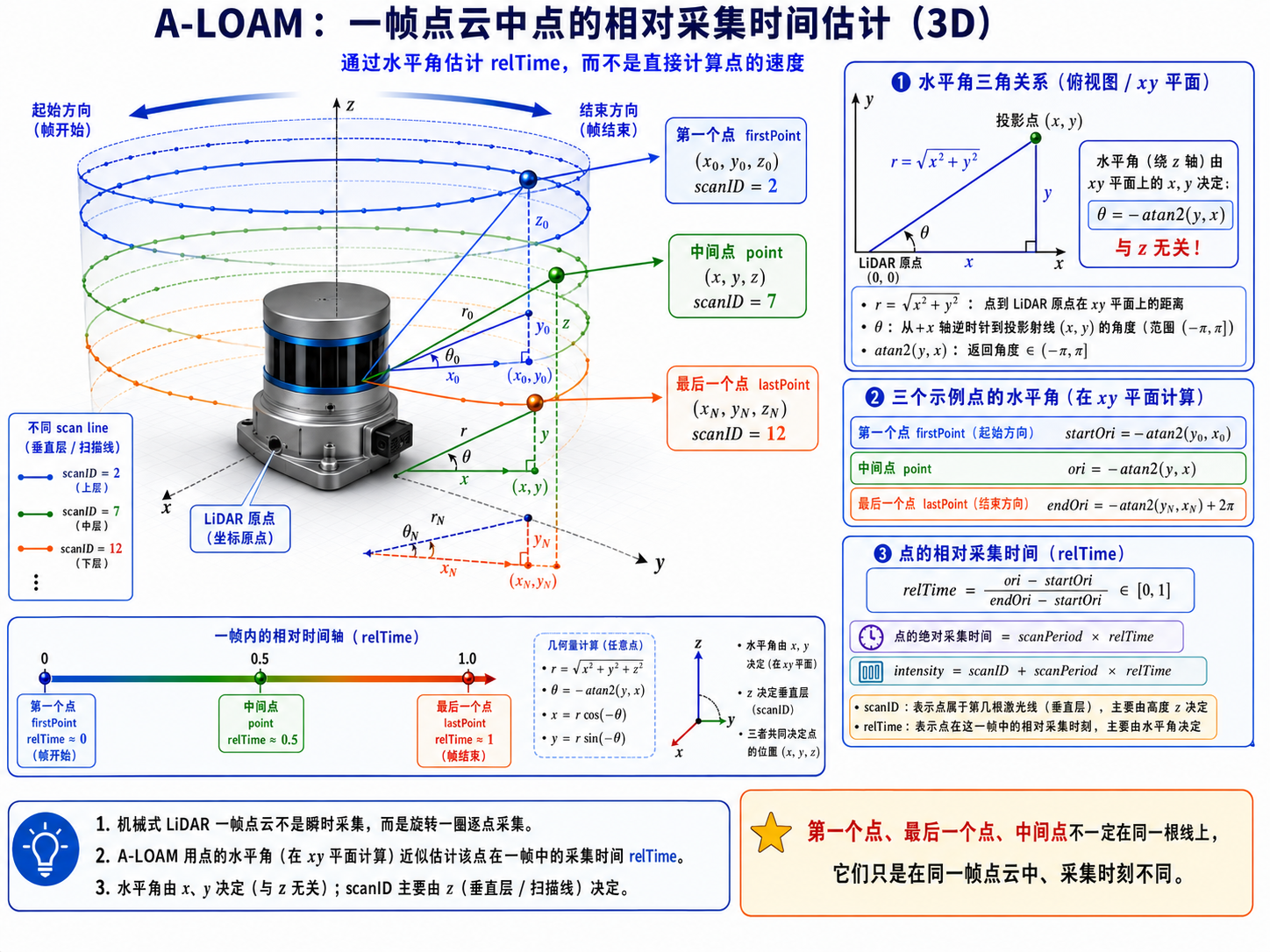
2.4 计算点在一帧中的相对时间
机械式 LiDAR 一帧点云不是瞬间采完的,而是旋转一圈扫出来的。也就是说,一帧点云内部的点有不同采集时间。
关键代码:
float startOri = -atan2(firstPoint.y, firstPoint.x);
float endOri = -atan2(lastPoint.y, lastPoint.x) + 2 * M_PI;
float ori = -atan2(point.y, point.x);
float relTime = (ori - startOri) / (endOri - startOri);
point.intensity = scanID + scanPeriod * relTime;核心公式:
relTime = (ori - startOri) / (endOri - startOri)解释:
startOri:
这一帧第一个点的水平角。
endOri:
这一帧最后一个点的水平角。
ori:
当前点的水平角。
relTime:
当前点在这一帧中的相对采集时间。如果:
relTime ≈ 0说明这个点接近当前帧开始时刻采集。
如果:
relTime ≈ 1说明这个点接近当前帧结束时刻采集。
最后这句很关键:
point.intensity = scanID + scanPeriod * relTime;这里 intensity 字段被复用了:
整数部分:scanID,表示第几根线
小数部分:相对采集时间后面的里程计模块会利用这个相对时间做运动补偿。A-LOAM 里基本就是用上一帧和当前帧之间估计出来的相对位姿 q_last_curr、t_last_curr,按点的相对时间 s 做插值,近似当作当前帧内部的运动补偿量。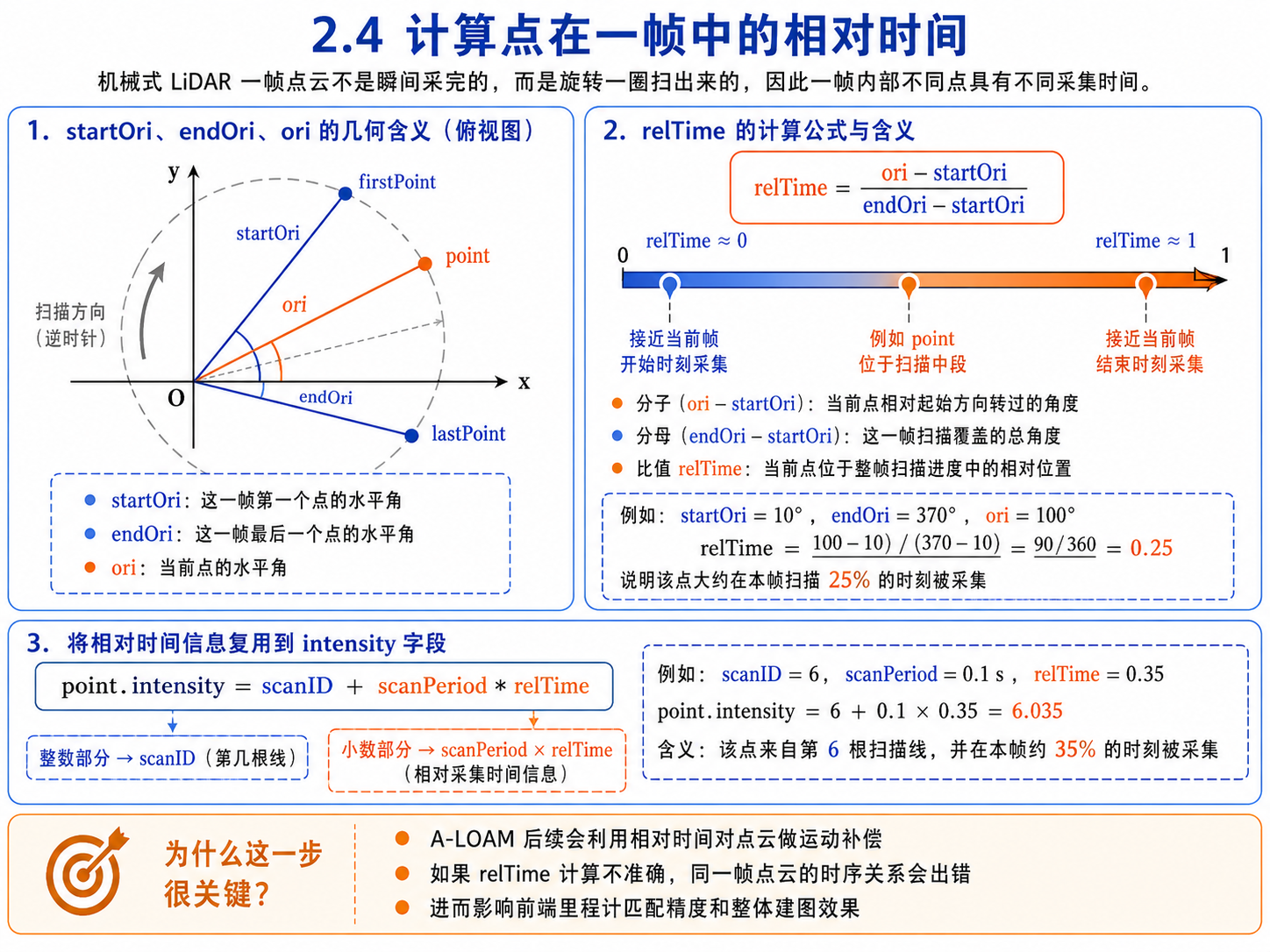
2.5 计算曲率
曲率是 A-LOAM 提取特征的核心。它想判断一个点局部是“平滑”还是“突变”。
关键代码:
for (int i = 5; i < cloudSize - 5; ++i)
{
float diffX =
cloud[i - 5].x + cloud[i - 4].x + cloud[i - 3].x +
cloud[i - 2].x + cloud[i - 1].x -
10 * cloud[i].x +
cloud[i + 1].x + cloud[i + 2].x + cloud[i + 3].x +
cloud[i + 4].x + cloud[i + 5].x;
float diffY =
cloud[i - 5].y + cloud[i - 4].y + cloud[i - 3].y +
cloud[i - 2].y + cloud[i - 1].y -
10 * cloud[i].y +
cloud[i + 1].y + cloud[i + 2].y + cloud[i + 3].y +
cloud[i + 4].y + cloud[i + 5].y;
float diffZ =
cloud[i - 5].z + cloud[i - 4].z + cloud[i - 3].z +
cloud[i - 2].z + cloud[i - 1].z -
10 * cloud[i].z +
cloud[i + 1].z + cloud[i + 2].z + cloud[i + 3].z +
cloud[i + 4].z + cloud[i + 5].z;
cloudCurvature[i] = diffX * diffX + diffY * diffY + diffZ * diffZ;
}对应公式:
c_i = || p_{i-5} + p_{i-4} + p_{i-3} + p_{i-2} + p_{i-1}
- 10 * p_i
+ p_{i+1} + p_{i+2} + p_{i+3} + p_{i+4} + p_{i+5} ||²这里:
p_i:
当前点。
p_{i-5} 到 p_{i-1}:
当前点前面的 5 个邻居。
p_{i+1} 到 p_{i+5}:
当前点后面的 5 个邻居。
c_i:
当前点曲率。为什么是 -10 * p_i?
因为当前点前后总共取了 10 个邻居。如果当前点处在平面或平滑区域,那么周围 10 个点的位置和大约等于:
10 * 当前点位置也就是:
p_{i-5} + ... + p_{i-1} + p_{i+1} + ... + p_{i+5}
≈ 10 * p_i所以差值接近 0,曲率小。
如果当前点处在墙角、柱子边缘、箱子棱边,那么它和周围点差异很大,曲率就大。
因此:
曲率大:角点 / 边缘点
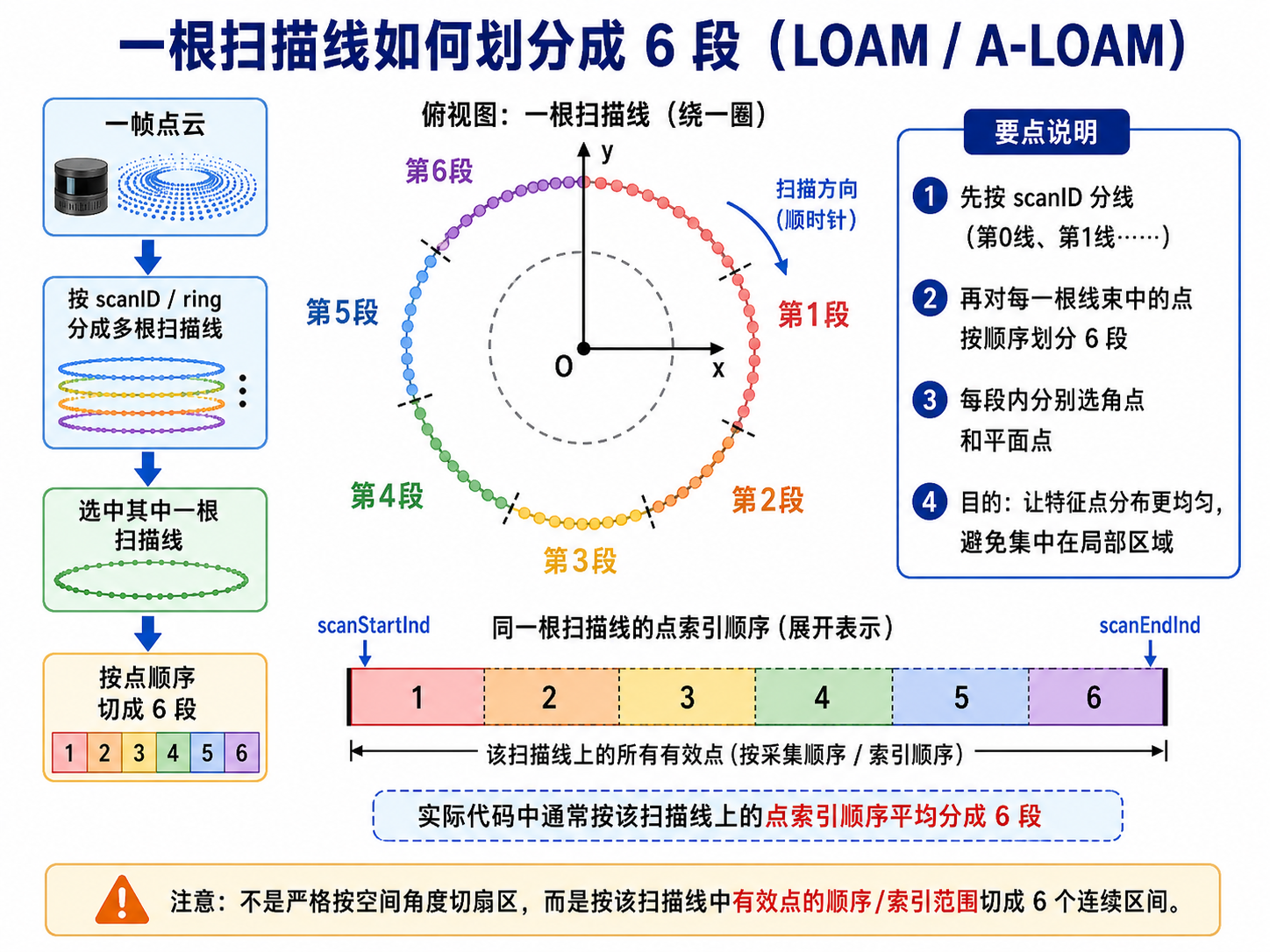
曲率小:平面点2.6 选择角点和平面点
A-LOAM 不会整帧统一选最大曲率点,而是每根线分成多个区域,每个区域单独选点。
for (int scanID = 0; scanID < N_SCANS; ++scanID)
{
for (int j = 0; j < 6; ++j)
{
int sp = scanStartInd[scanID]
+ (scanEndInd[scanID] - scanStartInd[scanID]) * j / 6;
int ep = scanStartInd[scanID]
+ (scanEndInd[scanID] - scanStartInd[scanID]) * (j + 1) / 6 - 1;
sort(cloudSortInd + sp, cloudSortInd + ep + 1, byCurvature);
}
}这样做是为了让特征点分布更均匀。否则角点可能全堆在某一侧,导致位姿约束不稳定。
角点选择:
int largestPickedNum = 0;
for (int k = ep; k >= sp; --k)
{
int ind = cloudSortInd[k];
if (cloudNeighborPicked[ind] == 0 &&
cloudCurvature[ind] > 0.1)
{
largestPickedNum++;
if (largestPickedNum <= 2)
{
cloudLabel[ind] = 2;
cornerPointsSharp.push_back(cloud[ind]);
cornerPointsLessSharp.push_back(cloud[ind]);
}
else if (largestPickedNum <= 20)
{
cloudLabel[ind] = 1;
cornerPointsLessSharp.push_back(cloud[ind]);
}
else
{
break;
}
cloudNeighborPicked[ind] = 1;
}
}这段代码是在 当前扫描线的某个分段 [sp, ep] 中选择角点特征:由于 cloudSortInd 已经按曲率从小到大排好序,所以这里从 ep 往 sp 反向遍历,相当于优先检查曲率最大的点。largestPickedNum 表示当前分段已经选出的角点数量;ind = cloudSortInd[k] 表示排序后第 k 个点在原始点云 cloud 里的真实索引;cloudNeighborPicked[ind] == 0 表示该点没有被选过,也没有被邻域抑制;cloudCurvature[ind] > 0.1 表示该点曲率足够大,局部几何变化明显,适合作为边缘/角点。如果满足条件,就先让 largestPickedNum++。当 largestPickedNum <= 2 时,说明这是当前分段里最尖锐的前 2 个点,会被标记为强角点:cloudLabel[ind] = 2,并同时加入 cornerPointsSharp 和 cornerPointsLessSharp;当 largestPickedNum <= 20 时,说明它不是最尖锐的前 2 个,但仍属于曲率较大的前 20 个点,会被标记为次角点:cloudLabel[ind] = 1,只加入 cornerPointsLessSharp;如果超过 20 个,就 break,停止当前分段的角点选择。最后 cloudNeighborPicked[ind] = 1 表示这个点已经被选中,后续不能重复选。整体逻辑就是:每个分段内按曲率从大到小选角点,最多选 2 个 sharp 角点、20 个 less sharp 角点,用于后续 LiDAR 匹配中的边缘特征约束。
这里:
cornerPointsSharp:
每个区域最尖锐的少量角点,用于精确匹配。
cornerPointsLessSharp:
数量更多的角点,用于后续里程计和建图参考。平面点选择:
int smallestPickedNum = 0;
for (int k = sp; k <= ep; ++k)
{
int ind = cloudSortInd[k];
if (cloudNeighborPicked[ind] == 0 &&
cloudCurvature[ind] < 0.1)
{
cloudLabel[ind] = -1;
surfPointsFlat.push_back(cloud[ind]);
smallestPickedNum++;
if (smallestPickedNum >= 4)
break;
cloudNeighborPicked[ind] = 1;
}
}这段代码是在 LOAM / A-LOAM 特征提取阶段,从当前扫描线某个分段 [sp, ep] 中挑选平面点 surfPointsFlat。前面代码通常已经把当前分段内的点按照曲率 cloudCurvature 从小到大排序,并把排序后的原始点索引存到 cloudSortInd 中,所以这里 for (int k = sp; k <= ep; ++k) 是从曲率最小的点开始往后遍历。ind = cloudSortInd[k] 表示当前候选点在原始点云 cloud 中的真实索引;cloudNeighborPicked[ind] == 0 表示该点没有被选中过,也没有被邻域抑制;cloudCurvature[ind] < 0.1 表示该点曲率足够小,局部表面比较平滑,适合作为平面特征点。满足条件后,代码把 cloudLabel[ind] = -1,表示将该点标记为平面点,然后通过 surfPointsFlat.push_back(cloud[ind]) 把它加入强平面点集合。smallestPickedNum 用来统计当前分段已经选了多少个平面点,每选中一个就加 1;当数量达到 4 个时执行 break,说明当前分段最多只选 4 个最平坦的点,避免平面点过多集中在某一局部区域。最后 cloudNeighborPicked[ind] = 1 表示该点已经被使用,后续不再重复选择。整体逻辑就是:在每个分段里优先选择曲率最小、未被选过的点作为平面特征点,每段最多选 4 个,用于后续 LiDAR 匹配中的点到平面约束。
这里:
surfPointsFlat:
最平坦的少量平面点。
surfPointsLessFlat:
更多平面点,一般会做体素滤波,减少数量。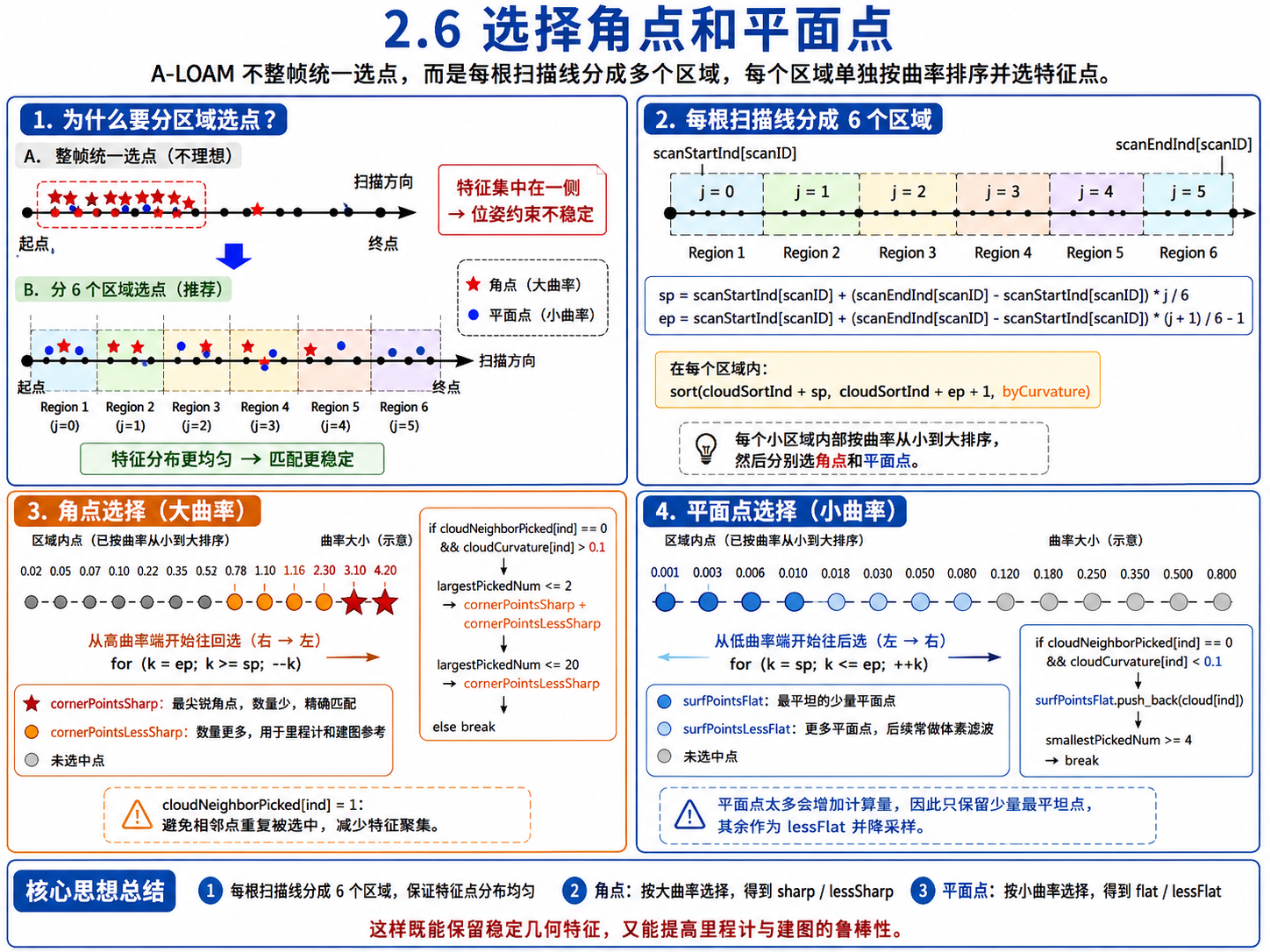
3. 优化模型:lidarFactor.hpp
3.1 这个文件在系统中的位置
lidarFactor.hpp 不直接订阅点云,也不发布话题。它是给优化器用的,作用是定义:
点到线残差
点到面残差这个文件会被 laserOdometry.cpp 和 laserMapping.cpp 使用。
所以它在逻辑上属于:
优化模型层它回答的问题是:
当前帧点经过位姿变换后,和参考线/参考面的误差怎么算?3.2 位姿变换公式
A-LOAM 优化的是当前帧位姿,可以写成:
T = [R, t]其中:
R:旋转
t:平移当前帧里的点 p 变换到参考坐标系:
p' = R * p + t代码里通常用四元数 q 表示旋转:
Eigen::Quaternion<T> quat(q[3], q[0], q[1], q[2]);
Eigen::Matrix<T, 3, 1> trans(t[0], t[1], t[2]);
Eigen::Matrix<T, 3, 1> p_trans = quat * p + trans;这里:
p:
当前帧点。
quat * p:
把点旋转到参考坐标系方向。
+ trans:
加上平移。
p_trans:
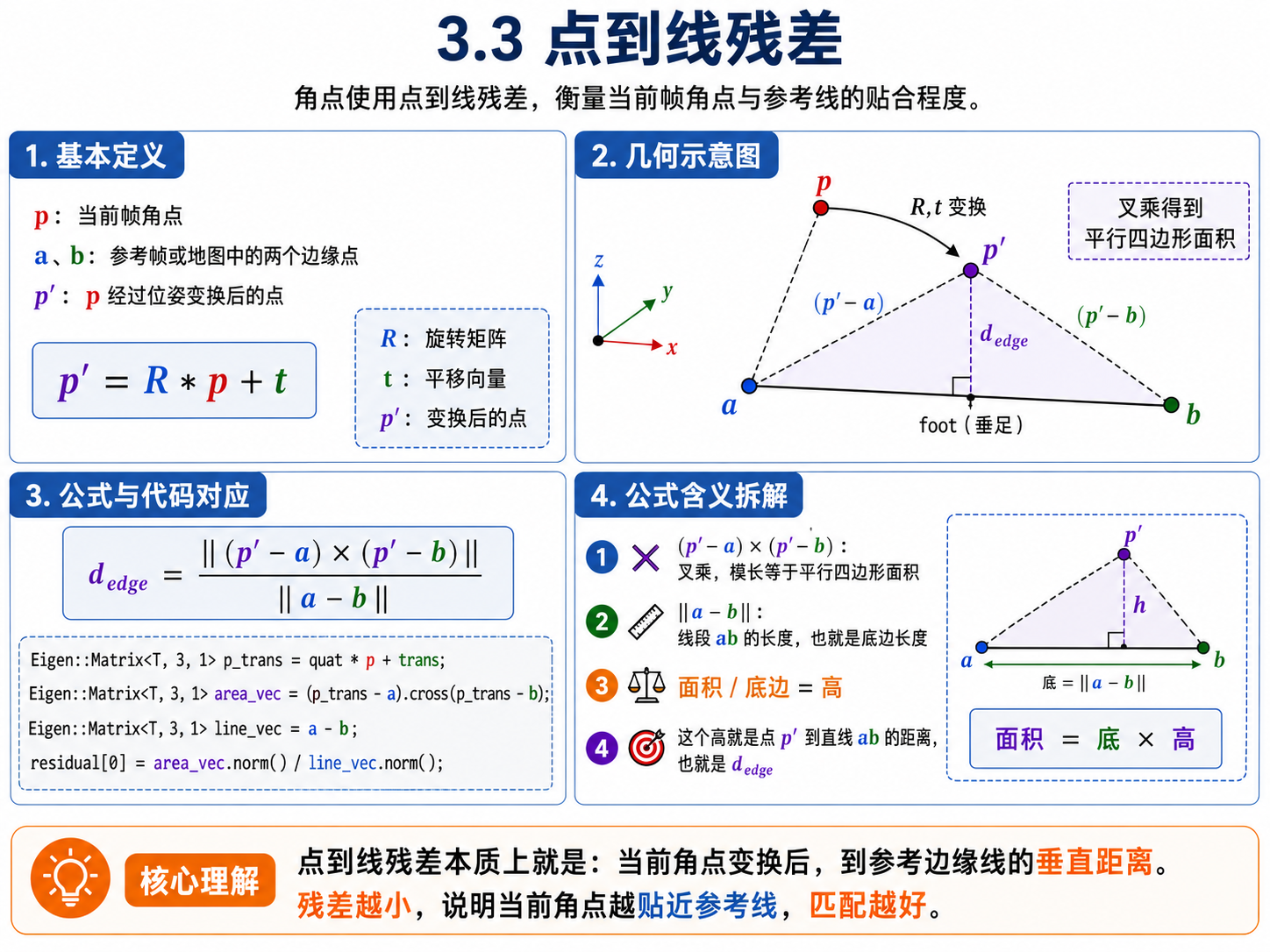
变换后的点。3.3 点到线残差
角点用点到线残差。
假设:
p:当前帧角点
a、b:参考帧或地图中的两个边缘点变换后:
p' = R * p + t点到线距离:
d_edge = || (p' - a) × (p' - b) || / || a - b ||代码:
Eigen::Matrix<T, 3, 1> p_trans = quat * p + trans;
Eigen::Matrix<T, 3, 1> a(
T(point_a.x), T(point_a.y), T(point_a.z));
Eigen::Matrix<T, 3, 1> b(
T(point_b.x), T(point_b.y), T(point_b.z));
Eigen::Matrix<T, 3, 1> area_vec =
(p_trans - a).cross(p_trans - b);
Eigen::Matrix<T, 3, 1> line_vec = a - b;
residual[0] = area_vec.norm() / line_vec.norm();公式解释:
(p' - a) × (p' - b):
叉乘,模长等于平行四边形面积。
||a - b||:
线段 ab 的长度。
面积 / 底边:
就是点到直线的高,也就是点到线距离。所以这个残差越小,说明当前角点越贴近参考线。
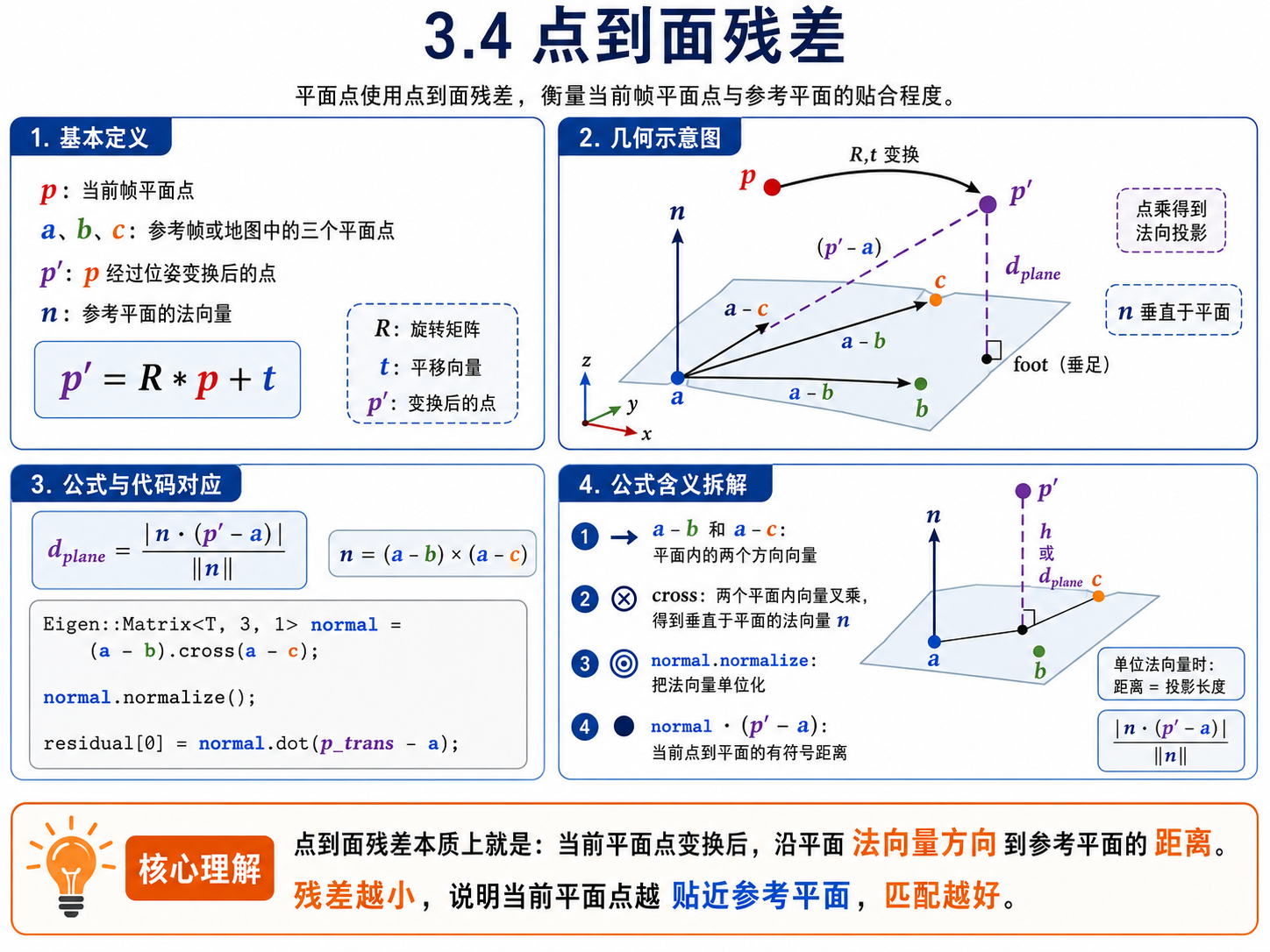
3.4 点到面残差
平面点用点到面残差。
假设:
p:当前帧平面点
a、b、c:参考帧或地图中的三个平面点平面法向量:
n = (a - b) × (a - c)点到面距离:
d_plane = | n · (p' - a) | / ||n||代码:
Eigen::Matrix<T, 3, 1> normal =
(a - b).cross(a - c);
normal.normalize();
residual[0] = normal.dot(p_trans - a);解释:
a - b 和 a - c:
平面内的两个方向向量。
cross:
两个平面内向量叉乘,得到垂直于平面的法向量。
normal.normalize:
把法向量单位化。
normal.dot(p_trans - a):
当前点到平面的有符号距离。如果残差接近 0,说明当前平面点基本落在参考平面上。
4. 前端二:laserOdometry.cpp
4.1 这个文件干什么?
laserOdometry.cpp 是前端里程计模块。
它接收 scanRegistration.cpp 输出的角点和平面点,然后做:
当前帧特征点 vs 上一帧特征点也就是 scan-to-scan 匹配。
它的目标是快速估计:
当前帧相对于上一帧的位姿变化输出一个高频、快速的里程计结果。
4.2 输入和保存的数据
输入:
当前帧 cornerPointsSharp
当前帧 surfPointsFlat
当前帧 cornerPointsLessSharp
当前帧 surfPointsLessFlat内部会保存上一帧:
laserCloudCornerLast
laserCloudSurfLast当前帧来了以后,就和上一帧做匹配。
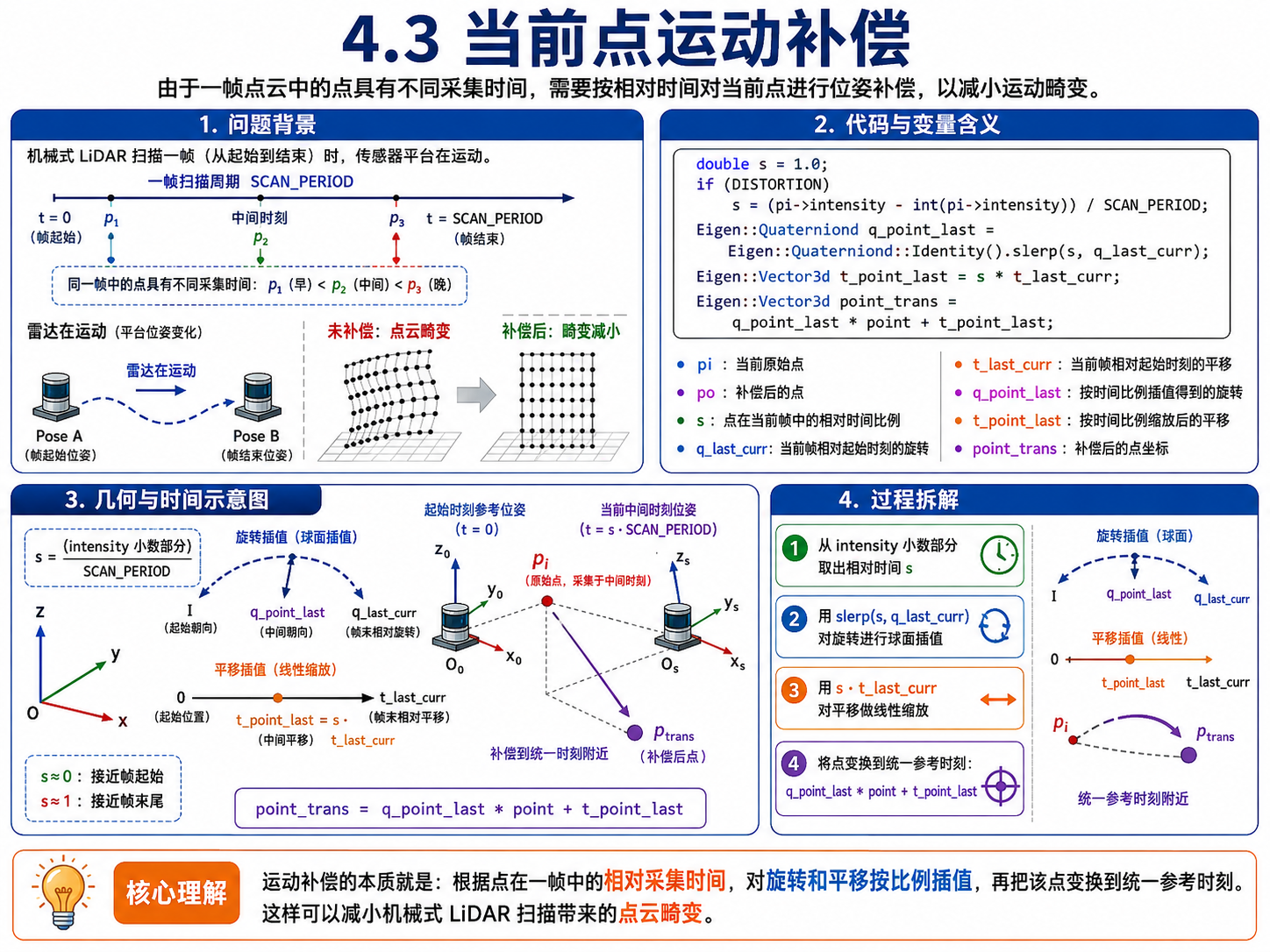
4.3 当前点运动补偿
因为一帧点云内部点的采集时间不同,所以当前点要根据相对时间做补偿。
void TransformToStart(PointType const *pi, PointType *po)
{
double s = 1.0;
if (DISTORTION)
s = (pi->intensity - int(pi->intensity)) / SCAN_PERIOD;
Eigen::Quaterniond q_point_last =
Eigen::Quaterniond::Identity().slerp(s, q_last_curr);
Eigen::Vector3d t_point_last = s * t_last_curr;
Eigen::Vector3d point(pi->x, pi->y, pi->z);
Eigen::Vector3d point_trans =
q_point_last * point + t_point_last;
po->x = point_trans.x();
po->y = point_trans.y();
po->z = point_trans.z();
po->intensity = pi->intensity;
}解释:
s = (pi->intensity - int(pi->intensity)) / SCAN_PERIOD;前面 scanRegistration.cpp 把点的相对时间放进了 intensity 小数部分。这里就是把相对时间取出来。
slerp(s, q_last_curr)这是四元数球面插值。因为当前点可能是在一帧中间采集的,所以旋转量也要按时间比例插值。
t_point_last = s * t_last_curr;平移也按时间比例缩放。
point_trans = q_point_last * point + t_point_last;把点补偿到统一时刻附近,减少运动畸变。
4.4 角点匹配:当前角点找上一帧的线
for (int i = 0; i < cornerPointsSharpNum; ++i)
{
PointType pointSel;
TransformToStart(&cornerPointsSharp->points[i], &pointSel);
kdtreeCornerLast->nearestKSearch(
pointSel, 1, pointSearchInd, pointSearchSqDis);
int closestPointInd = pointSearchInd[0];
int minPointInd2 = findAnotherCornerPointInDifferentScanLine();
if (minPointInd2 >= 0)
{
ceres::CostFunction *cost_function =
LidarEdgeFactor::Create(
cornerPointsSharp->points[i],
laserCloudCornerLast->points[closestPointInd],
laserCloudCornerLast->points[minPointInd2],
s);
problem.AddResidualBlock(
cost_function, loss_function, para_q, para_t);
}
}逻辑是:
1. 当前角点先做运动补偿。
2. 在上一帧角点云中找最近点。
3. 再找另一个合适角点。
4. 两个参考角点组成一条线。
5. 当前角点建立点到线残差。几何意义:
当前帧的边缘点,应该落在上一帧的某条边缘线附近。4.5 平面点匹配:当前平面点找上一帧的面
for (int i = 0; i < surfPointsFlatNum; ++i)
{
PointType pointSel;
TransformToStart(&surfPointsFlat->points[i], &pointSel);
kdtreeSurfLast->nearestKSearch(
pointSel, 1, pointSearchInd, pointSearchSqDis);
int closestPointInd = pointSearchInd[0];
int minPointInd2 = findSecondSurfPoint();
int minPointInd3 = findThirdSurfPoint();
if (minPointInd2 >= 0 && minPointInd3 >= 0)
{
ceres::CostFunction *cost_function =
LidarPlaneFactor::Create(
surfPointsFlat->points[i],
laserCloudSurfLast->points[closestPointInd],
laserCloudSurfLast->points[minPointInd2],
laserCloudSurfLast->points[minPointInd3],
s);
problem.AddResidualBlock(
cost_function, loss_function, para_q, para_t);
}
}逻辑是:
1. 当前平面点先做运动补偿。
2. 在上一帧平面点云中找最近点。
3. 再找两个合适平面点。
4. 三个参考平面点构成一个平面。
5. 当前平面点建立点到面残差。几何意义:
当前帧的平面点,应该落在上一帧的某个平面附近。4.6 前端里程计优化目标
laserOdometry.cpp 优化的是当前帧相对于上一帧的位姿:
T* = argmin_T {
Σ || e_edge(T) ||² + Σ || e_plane(T) ||²
}解释:
T:
当前帧相对上一帧的位姿。
e_edge:
角点到线误差。
e_plane:
平面点到面误差。
Σ:
所有特征点误差求和。Ceres 会优化:
para_q:旋转四元数
para_t:平移向量目标是让所有角点尽量贴近线,所有平面点尽量贴近面。
这个结果速度快,适合实时输出,但它只参考上一帧,所以会累计误差。
5. 后端:laserMapping.cpp
5.1 这个文件干什么?
laserMapping.cpp 是后端建图优化模块。
它做的是:
当前帧特征点 vs 局部地图特征点也就是 scan-to-map 匹配。
它和 laserOdometry.cpp 的区别是:
laserOdometry.cpp:
当前帧 vs 上一帧,速度快。
laserMapping.cpp:
当前帧 vs 局部地图,更稳定。局部地图包含多帧历史点云,所以约束更丰富,优化结果更稳定。
5.2 当前点变换到地图坐标系
当前帧点需要先根据初始位姿变换到地图坐标系附近。
void pointAssociateToMap(PointType const *pi, PointType *po)
{
Eigen::Vector3d point(pi->x, pi->y, pi->z);
Eigen::Vector3d point_w =
q_w_curr * point + t_w_curr;
po->x = point_w.x();
po->y = point_w.y();
po->z = point_w.z();
po->intensity = pi->intensity;
}公式:
p_map = R_w_curr * p_curr + t_w_curr解释:
p_curr:
当前帧坐标系下的点。
R_w_curr:
当前帧到地图坐标系的旋转。
t_w_curr:
当前帧到地图坐标系的平移。
p_map:
变换到地图坐标系后的点。5.3 局部地图维护
A-LOAM 不会每次都拿全局地图匹配,因为地图越来越大,计算量会越来越高。
所以它只取当前位置附近的一片局部地图
laserCloudCornerFromMap.clear();
laserCloudSurfFromMap.clear();
for (int i = nearbyCubeStart; i <= nearbyCubeEnd; ++i)
{
*laserCloudCornerFromMap += *laserCloudCornerArray[i];
*laserCloudSurfFromMap += *laserCloudSurfArray[i];
}
kdtreeCornerFromMap->setInputCloud(laserCloudCornerFromMap);
kdtreeSurfFromMap->setInputCloud(laserCloudSurfFromMap);这里:
laserCloudCornerFromMap:
局部地图角点集合。
laserCloudSurfFromMap:
局部地图平面点集合。
KD-Tree:
用于快速找最近邻点。局部地图的目的:
减少计算量
提高实时性
只匹配当前位置附近的有效结构5.4 后端角点匹配:PCA 找线
在后端,当前角点不是简单找两个点,而是在局部地图角点里找 5 个近邻点,然后判断这 5 个点是否形成线结构。
kdtreeCornerFromMap->nearestKSearch(
pointSel, 5, pointSearchInd, pointSearchSqDis);
if (pointSearchSqDis[4] < 1.0)
{
Eigen::Vector3d center = Eigen::Vector3d::Zero();
for (int j = 0; j < 5; ++j)
{
PointType p = laserCloudCornerFromMap->points[pointSearchInd[j]];
center += Eigen::Vector3d(p.x, p.y, p.z);
}
center /= 5.0;
Eigen::Matrix3d covMat = Eigen::Matrix3d::Zero();
for (int j = 0; j < 5; ++j)
{
PointType p = laserCloudCornerFromMap->points[pointSearchInd[j]];
Eigen::Vector3d tmp(p.x - center.x(),
p.y - center.y(),
p.z - center.z());
covMat += tmp * tmp.transpose();
}
Eigen::SelfAdjointEigenSolver<Eigen::Matrix3d> saes(covMat);
Eigen::Vector3d eigenvalues = saes.eigenvalues();
Eigen::Matrix3d eigenvectors = saes.eigenvectors();
if (eigenvalues[2] > 3 * eigenvalues[1])
{
Eigen::Vector3d unit_direction = eigenvectors.col(2);
Eigen::Vector3d point_on_line_a =
center + 0.1 * unit_direction;
Eigen::Vector3d point_on_line_b =
center - 0.1 * unit_direction;
addEdgeResidual(pointSel, point_on_line_a, point_on_line_b);
}
}这里重点是 PCA。
协方差矩阵表示这 5 个点在三维空间中的分布情况。
特征值可以理解成:
λ0、λ1、λ2:
点云沿三个主方向的分散程度。如果:
λ2 >> λ1说明这几个点主要沿一个方向分布,像一条线。
代码中:
if (eigenvalues[2] > 3 * eigenvalues[1])表示最大方向明显强于第二大方向,可以认为是线特征。
然后:
unit_direction = eigenvectors.col(2);取最大特征值对应的特征向量作为线方向。
再构造线上的两个点:
point_on_line_a = center + 0.1 * unit_direction;
point_on_line_b = center - 0.1 * unit_direction;这两个点就代表局部地图中的一条边缘线。
5.5 后端平面点匹配:最小二乘拟合平面
当前平面点会在局部地图平面点中找 5 个近邻点,然后拟合平面。
kdtreeSurfFromMap->nearestKSearch(
pointSel, 5, pointSearchInd, pointSearchSqDis);
if (pointSearchSqDis[4] < 1.0)
{
Eigen::Matrix<double, 5, 3> A;
Eigen::Matrix<double, 5, 1> b;
for (int j = 0; j < 5; ++j)
{
PointType p = laserCloudSurfFromMap->points[pointSearchInd[j]];
A(j, 0) = p.x;
A(j, 1) = p.y;
A(j, 2) = p.z;
b(j, 0) = -1.0;
}
Eigen::Vector3d norm = A.colPivHouseholderQr().solve(b);
double negative_OA_dot_norm = 1.0 / norm.norm();
norm.normalize();
bool planeValid = true;
for (int j = 0; j < 5; ++j)
{
PointType p = laserCloudSurfFromMap->points[pointSearchInd[j]];
double distance =
fabs(norm.x() * p.x +
norm.y() * p.y +
norm.z() * p.z +
negative_OA_dot_norm);
if (distance > 0.2)
{
planeValid = false;
break;
}
}
if (planeValid)
{
addPlaneResidual(pointSel, norm, negative_OA_dot_norm);
}
}平面方程是:
a*x + b*y + c*z + d = 0代码把它变形成:
a*x + b*y + c*z = -1于是 5 个点可以构成:
x1*a + y1*b + z1*c = -1
x2*a + y2*b + z2*c = -1
x3*a + y3*b + z3*c = -1
x4*a + y4*b + z4*c = -1
x5*a + y5*b + z5*c = -1矩阵形式:
A * n = b其中:
n = [a, b, c]^T因为 5 个方程、3 个未知数,所以用最小二乘求解:
norm = A.colPivHouseholderQr().solve(b);然后检查这 5 个点是否真的接近平面:
distance = fabs(a*x + b*y + c*z + d);如果某些点离平面太远,说明它们不是稳定平面结构,这个约束就丢掉。
5.6 后端优化目标
后端优化的是当前帧在地图坐标系下的位姿:
T_map* = argmin_T {
Σ || e_edge_map(T) ||² + Σ || e_plane_map(T) ||²
}这里:
e_edge_map:
当前角点到局部地图线特征的误差。
e_plane_map:
当前平面点到局部地图平面特征的误差。它比前端里程计更稳定,因为它参考的是局部地图,而不是单独上一帧。
5.7 当前帧加入地图并降采样
优化完成后,当前帧特征点会加入地图。
for (int i = 0; i < laserCloudCornerStackNum; ++i)
{
pointAssociateToMap(&laserCloudCornerStack->points[i], &pointSel);
laserCloudCornerArray[cubeInd]->push_back(pointSel);
}
for (int i = 0; i < laserCloudSurfStackNum; ++i)
{
pointAssociateToMap(&laserCloudSurfStack->points[i], &pointSel);
laserCloudSurfArray[cubeInd]->push_back(pointSel);
}加入地图后,还要体素滤波:
downSizeFilterCorner.setInputCloud(laserCloudCornerArray[i]);
downSizeFilterCorner.filter(*laserCloudCornerArray[i]);
downSizeFilterSurf.setInputCloud(laserCloudSurfArray[i]);
downSizeFilterSurf.filter(*laserCloudSurfArray[i]);体素滤波的作用:
减少地图点数量
防止地图无限增长
加快 KD-Tree 搜索
保持主要几何结构6. 按“前端 / 优化 / 后端”重新总结代码顺序
你可以这样记 A-LOAM 文件顺序:
第一层:数据输入
kittiHelper.cpp
负责把数据集点云变成 ROS 点云话题。
真实雷达场景下,这个不是算法重点。
第二层:前端特征提取
scanRegistration.cpp
负责点云预处理、线束划分、相对时间计算、曲率计算、角点和平面点提取。
第三层:优化残差模型
lidarFactor.hpp
负责定义点到线、点到面的 Ceres 残差。
这个文件被前端里程计和后端建图共同使用。
第四层:前端里程计
laserOdometry.cpp
负责当前帧和上一帧匹配。
角点找线,平面点找面,优化帧间位姿。
第五层:后端建图优化
laserMapping.cpp
负责当前帧和局部地图匹配。
局部地图中 PCA 找线、最小二乘拟合平面,优化地图位姿,并更新地图。7. 完整流程详细总结
A-LOAM 运行时,首先需要点云输入。如果是 KITTI 数据集,kittiHelper.cpp 会把 .bin 文件中的 x、y、z、intensity 读取出来,转成 ROS 点云话题。如果是真实雷达,则由雷达驱动直接发布原始点云。
原始点云进入 scanRegistration.cpp 后,系统先去掉无效点和距离太近的点。然后根据每个点的垂直角度计算 scanID,判断它属于第几根激光线。接着根据水平角度计算点在当前帧中的相对采集时间,并把 scanID 和相对时间编码到 intensity 字段中。
然后,scanRegistration.cpp 按照扫描线重新排列点云,并对每个点计算曲率。曲率大的点代表局部变化剧烈,通常是墙角、柱子边缘、箱子棱边,所以选为角点;曲率小的点代表局部平滑,通常是地面、墙面、桌面,所以选为平面点。为了让特征分布均匀,它会按线束、按区域分别选点,而不是整帧统一排序。
特征点提取完成后,进入 laserOdometry.cpp。这个文件做前端帧间里程计,也就是当前帧和上一帧匹配。当前角点会在上一帧角点中找两个点构成边缘线,建立点到线误差;当前平面点会在上一帧平面点中找三个点构成平面,建立点到面误差。这里实际使用的残差计算来自 lidarFactor.hpp。
lidarFactor.hpp 是优化模型核心。它定义了两个最重要的几何误差。第一个是点到线误差:
d_edge = || (p' - a) × (p' - b) || / || a - b ||第二个是点到面误差:
d_plane = | n · (p' - a) | / ||n||其中:
p' = R * p + t表示把当前帧点通过当前估计位姿变换到参考坐标系。优化器调整的就是 R 和 t,让所有点到线、点到面的误差尽量小。
laserOdometry.cpp 优化完成后,会得到一个快速里程计结果。这个结果频率高、实时性好,但它只参考上一帧,所以长期运行会有累计误差。
接着进入 laserMapping.cpp。这个文件做后端局部地图优化。它先把当前帧特征点根据前端里程计初值变换到地图坐标系附近,然后从已有地图中取出当前位置附近的局部地图。当前角点会在局部地图角点中找附近点,并通过 PCA 判断这些点是否形成线结构;当前平面点会在局部地图平面点中找附近点,并用最小二乘拟合平面。
如果线和平面都有效,laserMapping.cpp 会再次构建点到线、点到面的残差,并用 Ceres 优化当前帧在地图坐标系下的位姿。由于这次参考的是局部地图,而不是单独上一帧,所以结果更稳定。
最后,优化后的当前帧特征点会被加入地图。为了防止地图点云越来越大,系统会对地图中的角点和平面点做体素滤波。最终发布优化后的位姿、TF、轨迹和点云地图。
最终主线可以压缩成:
数据输入
↓
scanRegistration.cpp:提取角点和平面点
↓
lidarFactor.hpp:定义点到线、点到面误差
↓
laserOdometry.cpp:当前帧和上一帧匹配,得到快速里程计
↓
laserMapping.cpp:当前帧和局部地图匹配,得到稳定地图位姿
↓
更新地图,发布轨迹和点云地图一句话记忆:
A-LOAM = 前端特征提取 + 优化残差建模 + 帧间里程计 + 后端局部地图优化。版权声明: 辛苦码字不易,转载请注明原文出处和作者信息,谢谢理解!
欢迎分享与交流,但拒绝任何形式的商业转载或洗稿。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐


 17
17 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)