【无人机航线轨迹】模拟基于 3DRobotics ArduPilot 的四旋翼飞行器附Matlab代码
✅作者简介:热爱科研的Matlab仿真开发者,擅长毕业设计辅导、数学建模、数据处理、建模仿真、程序设计、完整代码获取、论文复现及科研仿真。
🍎 往期回顾关注个人主页:Matlab科研工作室
👇 关注我领取海量matlab电子书和数学建模资料
🍊个人信条:做科研,博学之、审问之、慎思之、明辨之、笃行之,是为:博学慎思,明辨笃行。
🔥 内容介绍
一、引言
在无人机技术领域,模拟四旋翼飞行器的飞行对于航线轨迹规划、算法测试以及飞行性能研究至关重要。3DRobotics ArduPilot 作为一款广泛应用的开源飞控软件,为模拟四旋翼飞行器提供了强大的平台。通过模拟基于该软件的四旋翼飞行器,研究人员和爱好者可以在虚拟环境中深入探索无人机的飞行特性,优化航线轨迹,提升飞行安全性与效率。
二、3DRobotics ArduPilot 简介
- 开源与扩展性
:3DRobotics ArduPilot 是开源的飞控软件,这意味着全球的开发者都可以对其进行查看、修改和扩展。这种开源特性促进了无人机技术的快速发展,不同领域的专业人士能够根据自身需求定制飞控功能。例如,科研人员可以针对特定的研究任务,如环境监测、农业植保等,添加相应的传感器数据处理模块或控制算法。
- 多平台支持
:ArduPilot 支持多种硬件平台,包括常见的四旋翼飞行器、固定翼飞机、直升机等。对于四旋翼飞行器而言,它能够适配不同型号的飞控板,如 Pixhawk 系列。这种多平台兼容性使得用户在选择硬件时具有更大的灵活性,可根据预算、性能需求等因素挑选合适的硬件组合,搭建满足自身需求的四旋翼飞行器模拟系统。
三、模拟基于 3DRobotics ArduPilot 的四旋翼飞行器的关键要素
- 动力学模型
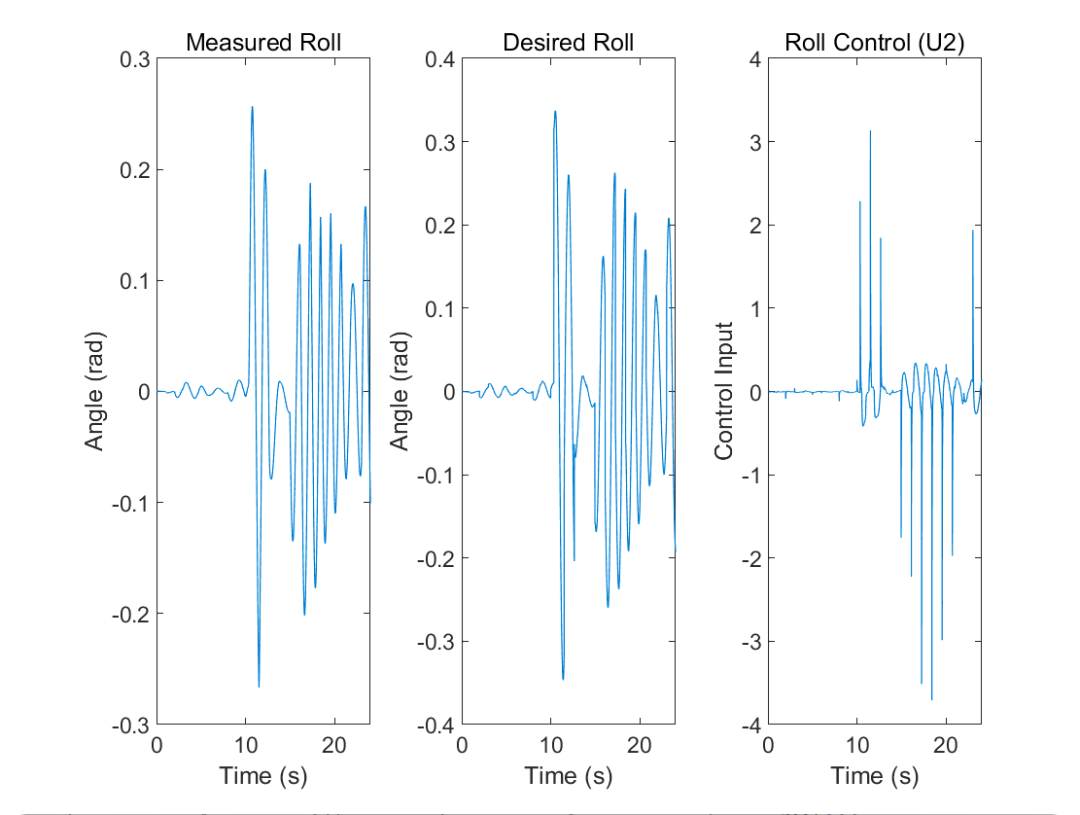
:四旋翼飞行器的动力学模型是模拟的基础。它描述了飞行器在各种力和力矩作用下的运动状态,包括平移运动(沿 x、y、z 轴的移动)和旋转运动(俯仰、偏航、滚转)。在模拟中,需要准确考虑飞行器的质量、惯性矩、电机推力与转速关系等参数。例如,电机产生的推力与电机转速的平方成正比,通过调整电机转速来控制飞行器的升力和姿态。同时,空气阻力、重力等外力也会对飞行器的运动产生影响,在动力学模型中都需精确建模。
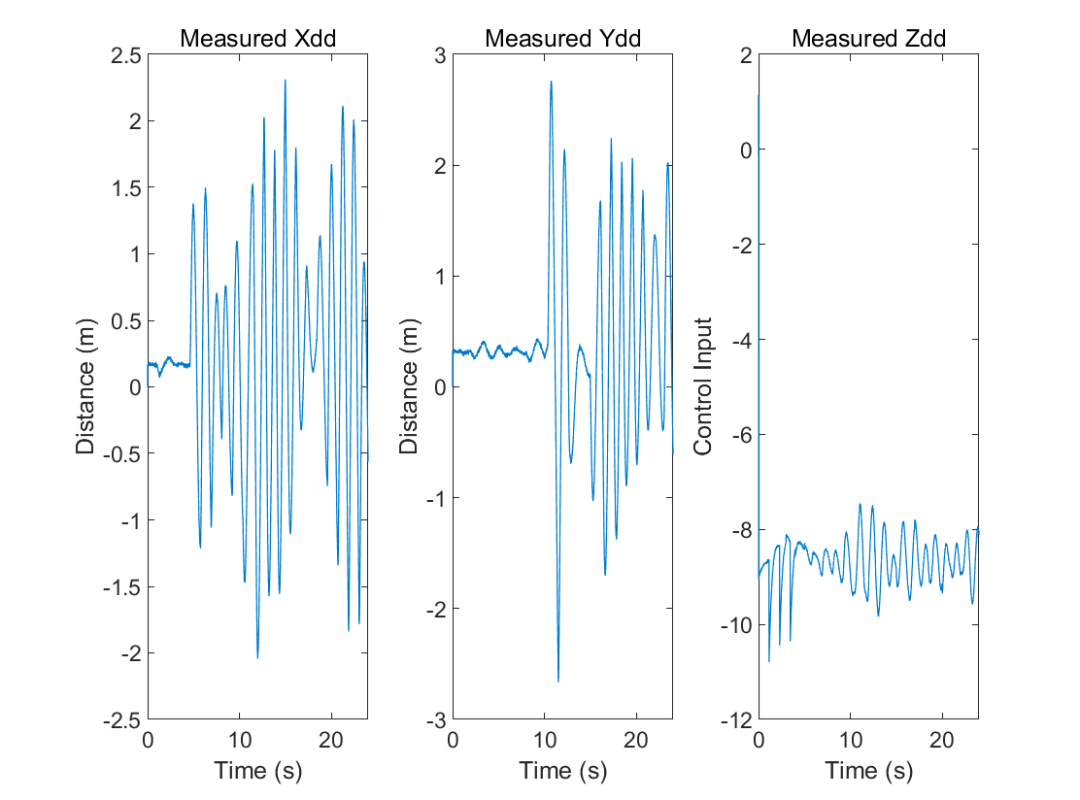
- 传感器模拟
:四旋翼飞行器通常配备多种传感器,如加速度计、陀螺仪、磁力计和 GPS 等。在模拟中,需要对这些传感器进行精确模拟,以提供与实际飞行相似的反馈数据。加速度计用于测量飞行器的加速度,陀螺仪测量角速度,磁力计用于获取地磁信息以确定航向,GPS 提供位置信息。通过模拟这些传感器的工作原理和噪声特性,能够使模拟环境更加真实。例如,模拟加速度计和陀螺仪的测量噪声,可使飞行器姿态估计更加贴近实际情况,考验飞控算法的鲁棒性。
- ArduPilot 软件配置与参数调整
:在模拟过程中,需要对 ArduPilot 软件进行合理配置和参数调整。这包括飞行器类型选择(设置为四旋翼)、传感器校准参数、控制参数(如 PID 控制参数)等。PID 控制参数决定了飞行器对各种控制指令的响应速度和稳定性。例如,比例(P)参数决定了控制器对误差的响应强度,积分(I)参数用于消除稳态误差,微分(D)参数则预测误差变化趋势,提前做出响应。通过精细调整这些参数,可优化飞行器的飞行性能,使其在模拟环境中稳定飞行并准确跟踪航线轨迹。
四、模拟流程与实现
- 环境搭建
:首先,需要搭建模拟环境。可以使用如 Gazebo 这样的开源机器人模拟器,它提供了一个逼真的物理模拟环境,能够模拟各种场景和物理特性。在 Gazebo 中创建一个四旋翼飞行器模型,设置其物理参数(质量、尺寸等)与实际飞行器相符。同时,将 ArduPilot 与 Gazebo 进行集成,使得 ArduPilot 能够接收 Gazebo 模拟的传感器数据,并向 Gazebo 发送控制指令来驱动飞行器模型运动。
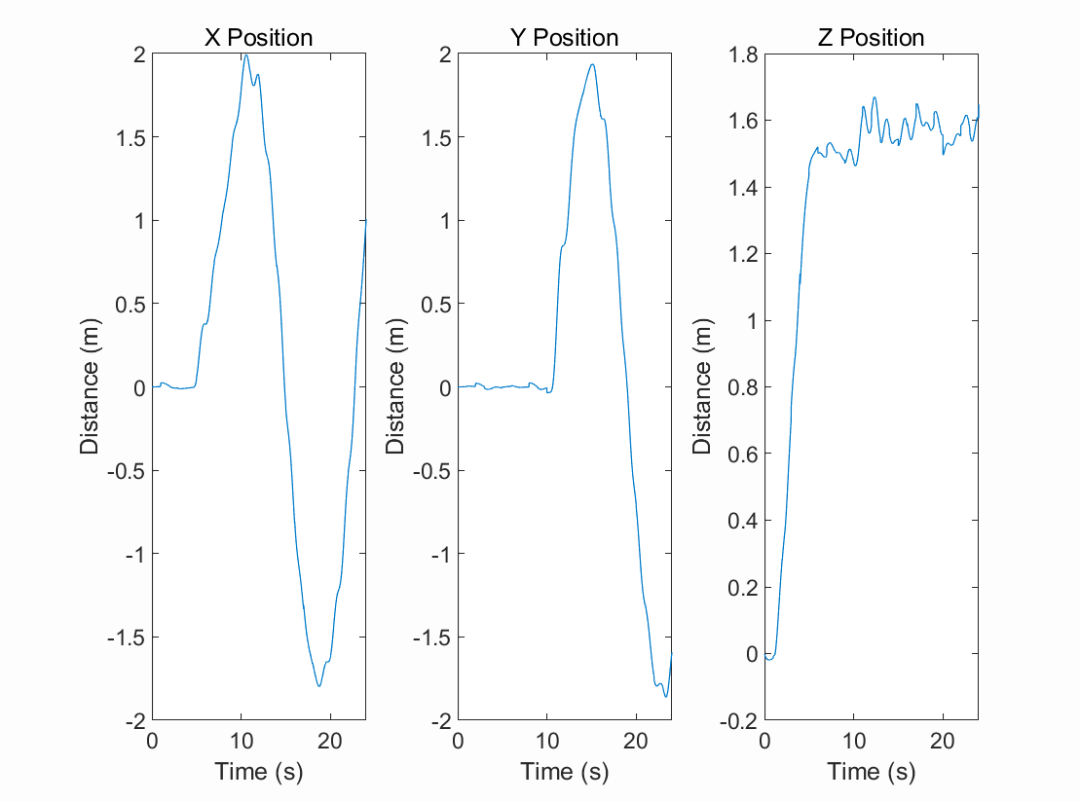
- 航线轨迹规划
:基于模拟环境,进行航线轨迹规划。可以采用多种方法,如 A * 算法、Dijkstra 算法等进行路径搜索,生成从起始点到目标点的最优或次优路径。也可以根据具体任务需求,手动设定一系列航点,飞行器将按照设定的顺序依次飞行到各个航点,形成特定的航线轨迹。例如,在模拟农业植保任务时,可规划飞行器在农田上方按照网格状航线飞行,确保全面覆盖农田。
- 模拟运行与结果分析
:完成环境搭建和航线轨迹规划后,启动模拟。观察飞行器在模拟环境中的飞行情况,记录飞行器的位置、姿态、速度等数据。通过分析这些数据,评估飞行器是否按照预定航线轨迹飞行,飞行过程是否稳定。例如,如果飞行器在某个航点附近出现较大偏差,可分析是航线规划问题,还是飞控参数设置不合理导致的,进而对模拟进行调整和优化。
⛳️ 运行结果
🔗 参考文献
🍅更多创新智能优化算法模型和应用场景可扫描关注
🌟机器学习/深度学习类:BP、SVM、RVM、DBN、LSSVM、ELM、KELM、HKELM、DELM、RELM、DHKELM、RF、SAE、LSTM、BiLSTM、GRU、BiGRU、PNN、CNN、XGBoost、LightGBM、TCN、BiTCN、ESN、Transformer、模糊小波神经网络、宽度学习等等均可~
方向涵盖风电预测、光伏预测、电池寿命预测、辐射源识别、交通流预测、负荷预测、股价预测、PM2.5浓度预测、电池健康状态预测、用电量预测、水体光学参数反演、NLOS信号识别、地铁停车精准预测、变压器故障诊断
🌟组合预测类:CNN/TCN/BiTCN/DBN/Transformer/Adaboost结合SVM、RVM、ELM、LSTM、BiLSTM、GRU、BiGRU、Attention机制类等均可(可任意搭配非常新颖)~
🌟分解类:EMD、EEMD、VMD、REMD、FEEMD、TVFEMD、CEEMDAN、ICEEMDAN、SVMD、FMD、JMD等分解模型均可~
🌟路径规划类:旅行商问题(TSP)、车辆路径问题(VRP、MVRP、CVRP、VRPTW等)、无人机三维路径规划、无人机协同、无人机编队、机器人路径规划、栅格地图路径规划、多式联运运输问题、 充电车辆路径规划(EVRP)、 双层车辆路径规划(2E-VRP)、 油电混合车辆路径规划、 船舶航迹规划、 全路径规划规划、 仓储巡逻、公交车时间调度、水库调度优化、多式联运优化等等~
🌟小众优化类:生产调度、经济调度、装配线调度、充电优化、车间调度、发车优化、水库调度、三维装箱、物流选址、货位优化、公交排班优化、充电桩布局优化、车间布局优化、集装箱船配载优化、水泵组合优化、解医疗资源分配优化、设施布局优化、可视域基站和无人机选址优化、背包问题、 风电场布局、时隙分配优化、 最佳分布式发电单元分配、多阶段管道维修、 工厂-中心-需求点三级选址问题、 应急生活物质配送中心选址、 基站选址、 道路灯柱布置、 枢纽节点部署、 输电线路台风监测装置、 集装箱调度、 机组优化、 投资优化组合、云服务器组合优化、 天线线性阵列分布优化、CVRP问题、VRPPD问题、多中心VRP问题、多层网络的VRP问题、多中心多车型的VRP问题、 动态VRP问题、双层车辆路径规划(2E-VRP)、充电车辆路径规划(EVRP)、油电混合车辆路径规划、混合流水车间问题、 订单拆分调度问题、 公交车的调度排班优化问题、航班摆渡车辆调度问题、选址路径规划问题、港口调度、港口岸桥调度、停机位分配、机场航班调度、泄漏源定位、冷链、时间窗、多车场等、选址优化、港口岸桥调度优化、交通阻抗、重分配、停机位分配、机场航班调度、通信上传下载分配优化、微电网优化、无功优化、配电网重构、储能配置、有序充电、MPPT优化、家庭用电、电/冷/热负荷预测、电力设备故障诊断、电池管理系统(BMS)SOC/SOH估算(粒子滤波/卡尔曼滤波)、 多目标优化在电力系统调度中的应用、光伏MPPT控制算法改进(扰动观察法/电导增量法)、电动汽车充放电优化、微电网日前日内优化、储能优化、家庭用电优化、供应链优化\智能电网分布式能源经济优化调度,虚拟电厂,能源消纳,风光出力,控制策略,多目标优化,博弈能源调度,鲁棒优化等等均可~
🌟 无人机应用方面:无人机路径规划、无人机控制、无人机编队、无人机协同、无人机任务分配、无人机安全通信轨迹在线优化、车辆协同无人机路径规划
🌟通信方面:传感器部署优化、通信协议优化、路由优化、目标定位优化、Dv-Hop定位优化、Leach协议优化、WSN覆盖优化、组播优化、RSSI定位优化、水声通信、通信上传下载分配
🌟信号处理方面:信号识别、信号加密、信号去噪、信号增强、雷达信号处理、信号水印嵌入提取、肌电信号、脑电信号、信号配时优化、心电信号、DOA估计、编码译码、变分模态分解、管道泄漏、滤波器、数字信号处理+传输+分析+去噪、数字信号调制、误码率、信号估计、DTMF、信号检测
🌟电力系统方面: 微电网优化、无功优化、配电网重构、储能配置、有序充电、MPPT优化、家庭用电、电/冷/热负荷预测、电力设备故障诊断、电池管理系统(BMS)SOC/SOH估算(粒子滤波/卡尔曼滤波)、 多目标优化在电力系统调度中的应用、光伏MPPT控制算法改进(扰动观察法/电导增量法)、电动汽车充放电优化、微电网日前日内优化、储能优化、家庭用电优化、供应链优化\智能电网分布式能源经济优化调度,虚拟电厂,能源消纳,风光出力,控制策略,多目标优化,博弈能源调度,鲁棒优化
🌟原创改进优化算法(适合需要创新的同学):原创改进2025年的波动光学优化算法WOO以及三国优化算法TKOA、白鲸优化算法BWO等任意优化算法均可,保证测试函数效果,一般可直接核心

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐



 2
2 0
0- 0



 已为社区贡献149条内容
已为社区贡献149条内容

所有评论(0)