Rokoko推出Coil Pro磁性空间定位系统,助力具身智能遥操作数据采集
在具身智能从仿真走向现实的关键阶段,高质量真机数据已成为制约模型泛化能力的核心瓶颈。传统惯性动捕在长时间采集中不可避免的根节点漂移,导致人体示范数据与机器人本体坐标系难以精确对齐,影响了遥操作数据的有效性和Sim-to-Real迁移成功率。
Rokoko Coil Pro磁性定位系统与手套协同抗漂移
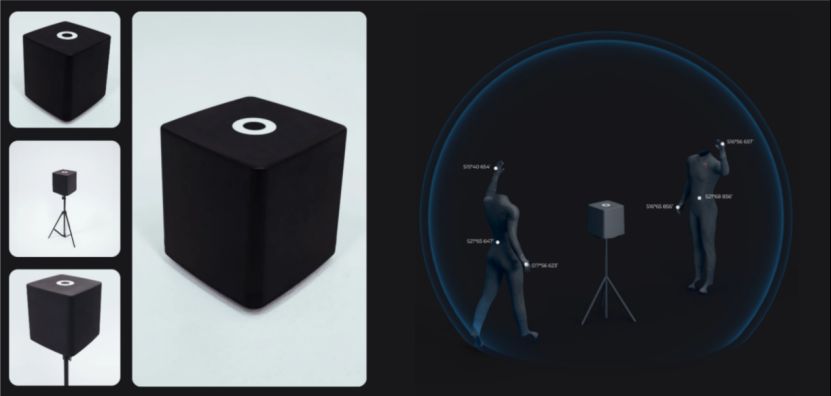
Rokoko 推出 Coil Pro 磁性空间定位系统,通过EMF电磁场与9轴IMU双重融合技术,在无摄像头、无标记点条件下实现有效区内绝对定位,为具身智能科研用户提供了一套便携、抗遮挡、显著抑制漂移的人体动作数据采集基准。
核心参数与技术优势

· EMF+IMU双重融合抑漂:Coil Pro 将电磁场空间定位与9轴IMU数据实时融合,相比纯惯性系统显著减少根节点累积漂移,提升空间定位准确度。
· 连续采集不中断:EMF有效半径为2m(直径4m),在该区域内提供绝对定位;超出有效区后自动无缝切换至纯IMU模式,确保动作捕捉全程不中断。
· 无线协同摆脱线缆束缚:支持WiFi无线传输,最远距离达100m,使科研人员可在更大范围内自由移动采集真机数据。
· 部署便捷高效:单人即可完成安装调试,常规部署时间约5分钟,大幅降低实验室及外场数据采集的准备门槛。
· 生态兼容免调试:原生适配 Smartsuit Pro II 与 Smartgloves II,联动工作无需额外配置或调试,开箱即用构建完整人体动作数据链路。
协同产品生态:构建完整数据链路
Coil Pro 是 Rokoko 具身智能数据采集生态的空间基准模块,需与以下产品协同以发挥价值:
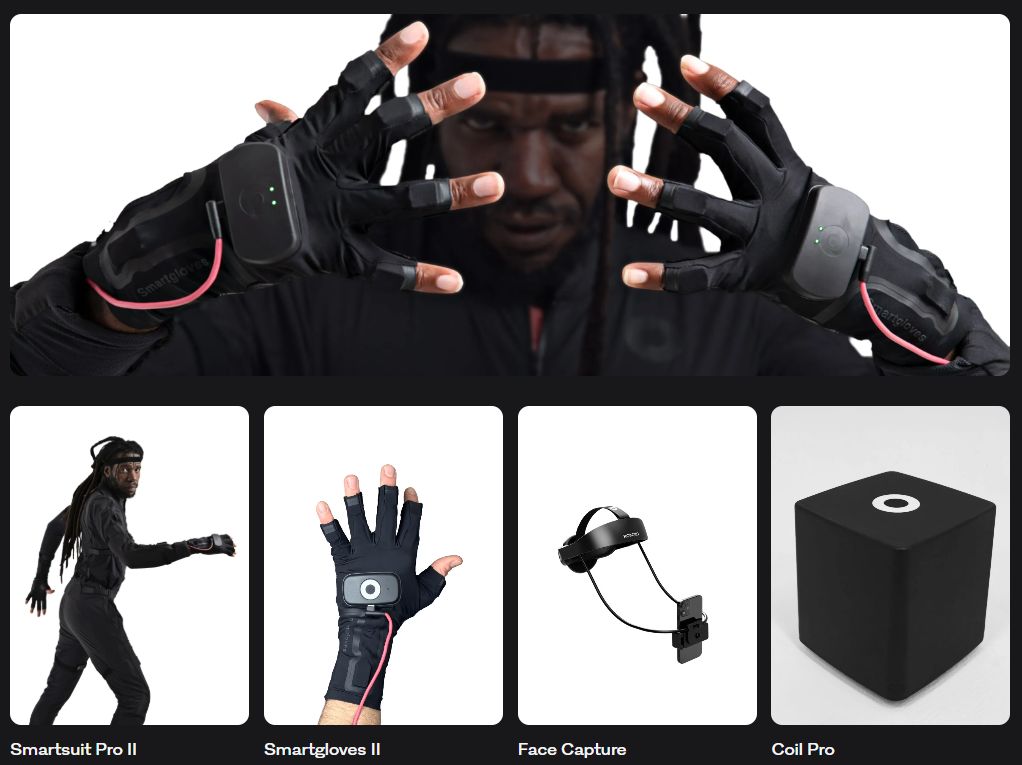
· Smartsuit Pro II:全身惯性动捕服,提供21个关节高精度姿态解算。Coil Pro 为其提供有效区内绝对位置校正,显著抑制根部漂移。
· Smartgloves II:手指级精细动作捕捉手套,与 Coil Pro 联动后实现指尖在三维空间中的全局定位,满足灵巧手遥操作数据采集需求。
· Rokoko Studio / API:原生支持ROS/ROS2接口,可将校正后的全身+手部数据实时流式传输至机器人控制系统或数据记录平台。
赋能具身智能前沿研究

· 高质量遥操作数据集构建:为双臂/人形机器人提供漂移显著抑制的人体示范轨迹,支撑模仿学习与行为克隆算法训练。
· Sim-to-Real域适应验证:在真实物理空间中采集与仿真环境坐标系对齐的基准数据,用于评估和缩小仿真与现实差距。
· 非结构化场景泛化测试:凭借无线传输与快速部署能力,将数据采集从实验室延伸至家庭、车间等真实环境,提升模型对开放世界的适应能力。
Rokoko Coil Pro,让每一帧真机数据都拥有可靠的空间基准,加速具身智能从实验室走向物理世界。
欢迎关注 “欣佰特科技” ,持续为大家带来 “具身智能领域”前沿技术及应用!详情可邮件咨询sales@cnbestec.com

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐



 8
8 0
0- 0



 已为社区贡献10条内容
已为社区贡献10条内容

所有评论(0)