小米、特斯拉、宇树人形机器人深度对比:CyberOne凭什么突围?
当马斯克把Optimus的量产目标喊到"百万台级",当宇树G1以9.9万价格引爆市场,小米第三代CyberOne(CyberOne V2)悄悄在北京亦庄的小米汽车工厂完成了多轮生产任务——机器人赛道的三国杀,早已从PPT演示走到了真实落地。很多人提到小米机器人只会说"生态便宜",却忽略了这家公司靠造车积累下的技术沉淀,正在悄悄改写行业格局。
图1 新款CyberOne V2现场互动实拍
一、赛道选择:小米走出第三条技术路线
目前人形机器人领域的技术路线,其实早已分成了清晰的三派:
-
特斯拉派:押注AI算法驱动,依靠自动驾驶数据和Dojo超算训练模型,追求终极通用能力,但是硬件成本高,落地慢
-
宇树派:从四足机器人迭代,深耕硬件关节与动态运动控制,先拿下教育、娱乐等中端场景快速商业化
-
小米派:走的是"造车技术迁移+生态链降本+工业落地验证"的混合路线,一边把手伸进汽车工厂攒经验,一边盯着C端消费市场等机会
小米的优势其实藏在很多人看不到的地方:造车过程中积累的整车控制、多传感器融合、动力电池管理、AI大模型训练能力,全部可以直接迁移到人形机器人上。这种技术同源性,是特斯拉之外其他玩家都不具备的——宇树在四足领域积累深厚,但没有整车制造的经验;传统机器人厂商缺AI能力,小米刚好把这两块捏在了一起。
2026年3月,小米创始人雷军率先对外披露了小米机器人进厂实习的进展,根据雷军公开披露的现场实测数据:小米人形机器人在自攻螺母上件工站中连续自主运行3小时,双侧同时安装成功率达到90.2%,同时满足最快76秒的产线生产节拍要求,还可完成料箱搬运、汽车车标安装等任务。这不是实验室里的演示效果,而是真实汽车工厂的投产数据。
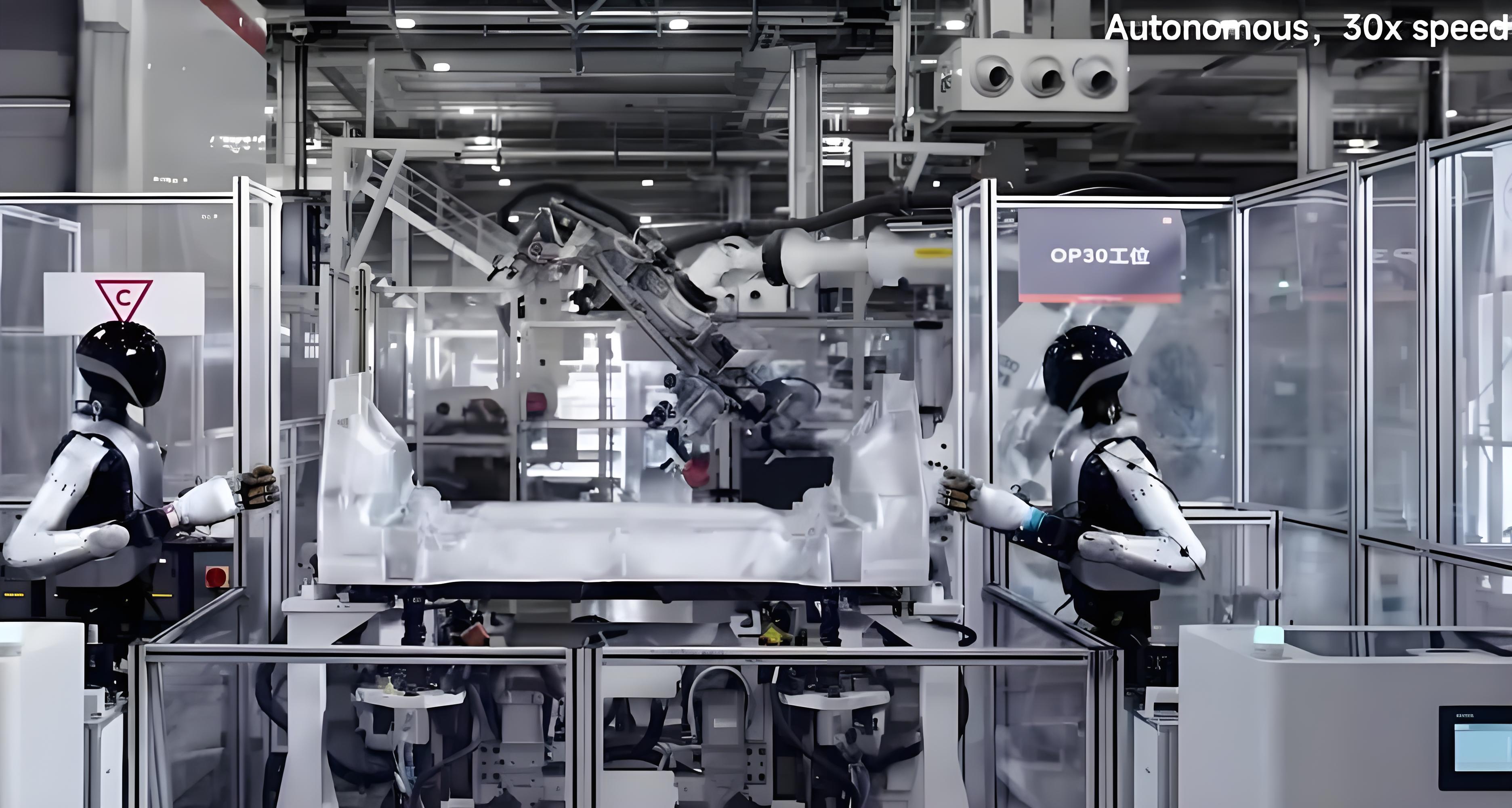
图2 小米机器人在小米汽车工厂作业现场图
小米集团合伙人卢伟冰在2025年度财报电话会接受《每日经济新闻》采访时明确表示:小米布局机器人已经有五到六年的时间,2026年已经在机器人领域取得了一些关键突破,能进厂里"打工",核心支撑来自两项技术:第一个就是"灵巧手"的技术,它是基于一个触觉抓取的微调模型;另一个就是机器人的VLA(视觉-语言-动作)模型Xiaomi-Robotics-0,这两个是落地应用背后最为关键的技术。
从公开信息看,小米第三代CyberOne已经在亦庄工厂承担自攻螺母上件、料箱搬运这类实际生产任务,关键指标"平均无故障时间"和"单次任务成功率"都在稳步提升,这种在真实生产场景中迭代的方式,比在实验室里跑演示靠谱得多。
二、核心硬件拆解:三者关节技术的真实差异
人形机器人的核心是关节,相当于人的"心脏",我们从三个核心维度做对比:
1. 灵巧手:小米的突破藏在细节里
在人形机器人领域,有一个共识:灵巧手是实现人机交互、完成精细操作最大的硬件瓶颈。腿部有足够空间安装大扭矩电机,手指却只能把所有部件塞进狭小的指节,既要保证扭矩,还要保证灵敏度,难度远高于腿部关节。小米在2026年投资者日展出的CyberOne V2,最大的技术亮点就在这双手上。

图3 小米CyberOne V2仿生灵巧手特写图
根据小米公开的技术资料,这款新手做了这些关键改进:
-
1:1极致仿生:将仿生手体积压缩了60%,尺寸与成年男性手部完全一致,自由度增加64%达到22-27个自由度,可达空间、惯量分布都无限逼近真实人手,能完成分发纸袋、比心、捏羽毛等精细操作,满足拧螺丝这类工业化生产任务要求。
-
全掌触觉覆盖:把全掌触觉传感器覆盖面积提升至8200平方毫米,通过触觉手套方案让机器人完美继承人类操作的"手感",即使视觉被遮挡也能完成正常操作。
-
微型汗腺散热:单手电机功率超100W,有30W会转化为废热,小米从人类出汗获得灵感,用金属3D打印制作了微型液冷循环通道解决散热问题,突破了15万次的循环使用寿命,满足工业场景连续作业要求。
对比另外两家的方案:宇树H2人形机器人重点优化了行走速度与负载能力,最快行走速度可达3.3m/s,手臂最大负载15kg,但是手部自由度仅12个,主要满足基础搬运,不支持超精细操作;特斯拉Optimus尚未公开最新灵巧手参数,目前公开演示仅完成基础抓取,技术成熟度还落后小米一步。
2. 电机方案:谁的扭矩密度更能打?
目前主流方案分为两种:无框力矩电机和空心杯电机。
-
特斯拉Optimus:采用大扭矩无框力矩电机配合谐波减速器,追求工业级的输出能力,单关节最大扭矩可以达到360N·m,但是单个电机成本超过万元,整套下来硬件成本居高不下,只能靠大规模量产压价
-
宇树H1:自研M系列低惯量关节电机,峰值扭矩密度做到了189N.m/Kg,成本仅为进口同类产品的50%,把性能和价格平衡得很好,才能把G1卖到9.9万的亲民价,而且已经实现小批量量产
-
小米CyberOne V2:自研高集成度一体化关节,结合了小米在电机控制领域多年的技术积累,扭矩密度达到175N.m/Kg,依托小米生态链的规模化制造能力,单关节成本比宇树再低15%-20%,为后续消费级降价留足了空间
3. 减速器:国产替代已经开始
减速器是人形机器人的传统卡脖子环节,目前三家的选择也完全不同:
-
特斯拉依然依赖进口谐波减速器,成本占比很高,产能也受上游限制
-
宇树已经实现部分自研行星减速器替代,在中端产品上性价比优势明显
-
小米通过投资生态链企业,正在推动减速器国产化,第三代CyberOne已经用上了国产谐波减速器,兼容性和稳定性已经通过工厂验证,随着核心部件国产替代加速,未来国产减速器的兼容性还会进一步提升,成本还能再降。
4. 感知与控制:路线差异带来体验差
-
特斯拉用"电流环估算力控"替代外置力传感器,成本更低,但是控制精度不如外置传感器,复杂操作容易出问题
-
宇树和小米都采用了"关节编码器+外置力传感器"的方案,控制精度更高,动态响应更快,能应对更复杂的操作场景;小米还叠加了来自自动驾驶的多传感器融合算法,对环境的适配能力比传统方案强很多。
核心参数对比
| 参数 | 宇树机器人(主流型号) | 小米CyberOne | 特斯拉Optimus |
|---|---|---|---|
| 最大关节峰值扭矩 | 360N.m | 300N.m | 未公开完整参数 |
| 关节总数(人形整机) | 19-31个 | 21个 | 28个 |
| 核心电机 | 自研M107,全自研零部件 | 自研CyberGear模组 | 谐波减速器+离合器 |
| 扭矩密度(代表性电机) | 约189.5N.M/kg | 96Nm/kg | 未公开 |
| 编码器配置 | 双编码器 | 单圈绝对值(CyberGear) | 未公开 |
三、商业化路径:小米的底气来自生态
很多人都在说,人形机器人现在都不赚钱,但是三家的商业化节奏其实完全不同:
-
特斯拉还在工厂内部迭代,预计2027年前后实现大规模量产,目前成本仍居高不下,商业化还要等三到五年
-
宇树现在已经跑通了商业化,从教育、科研、舞台表演到工业巡检都有落地,G1出货量已经做到了全球领先,靠现有产品就能实现现金流正向循环
-
小米走的是"先工业落地降本,再C端生态放量"的路径:先把机器人放在自己的汽车工厂里用,一边解决实际问题,一边优化技术、降低成本,等技术成熟了,再接入小米智能家居生态,打消费级市场。
雷军在2026年年初公开表示:"我预计,未来5年会有大批量人形机器人进入小米工厂干活。"这恰恰是小米最大的优势:国内没有任何一家机器人公司,能像小米一样拿出完整的智能家居生态——当人形机器人成本降到几万块,小米机器人可以直接控制全屋家电、做家庭助手、陪护老人,这个场景的想象空间,是特斯拉和宇树都比不了的。
四、风险与未来:小米需要攻克哪些关卡?
客观来说,小米现在也有需要突破的瓶颈: 一是动态运动能力和宇树还有差距,宇树G1已经能做后空翻、720度回旋踢这类高难度动作,小米CyberOne目前还聚焦在工业场景的静态、半动态任务,通用运动能力还需要迭代。 二是AI大模型的训练数据积累不如特斯拉,特斯拉靠自动驾驶攒了海量的真实场景数据,小米还需要靠更多的工业落地来丰富数据。
但是从行业整体来看,随着核心零部件国产替代加速,人形机器人的成本正在以超出预期的速度下降,小米的普惠路线刚好踩中了行业发展的节奏。未来三年,我们大概率会看到,价格亲民的人形机器人先从工业、教育场景走进千家万户,而最有可能把这件事做成的,一定是手握生态、擅长降本的小米。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐



 6
6 0
0- 0



 已为社区贡献32条内容
已为社区贡献32条内容

所有评论(0)