Agent LATS:我说“像人一样给我出一个方案,直接开干,不要问我!”
·
Agent LATS:我说“像人一样给我出一个方案,直接开干,不要问我!”
—— 带方向盘的人机协同规划策略
LATS的核心搜索过程包括六个步骤:选择(Selection)、扩展(Expansion)、评估(Evaluation)、模拟(Simulation)、回溯(Backpropagation)和反思(Reflection)。
从我的角度上看,这个决策方式是很符合项目规划的。
比如在进行一些方案规划的时候,需要
调研(扩展、模拟)→ 初评(评估)→ 复盘与教训沉淀(反思)→ 决策(选择)→ 迭代(回溯)
才能确定最后的方案只不过现在的这个流程交给了LLM
1. Agent方案对比
| 推理 | 行动 | 规划 | 反思 | 外部记忆 | 备注 | |
|---|---|---|---|---|---|---|
| CoT(思维链) | √ | |||||
| ReAct | √ | √ | ||||
| ToT(Tree of Thoughts) | √ | √ | 闭门造车式 论文中有外部记忆,但是我记得是没有的 |
|||
| RAP | √ | √ | √ | 自己推演一下 | ||
| Reflexion | √ | √ | √ | √ | ||
| LATS | √ | √ | √ | √ | √ |
2. 执行流程
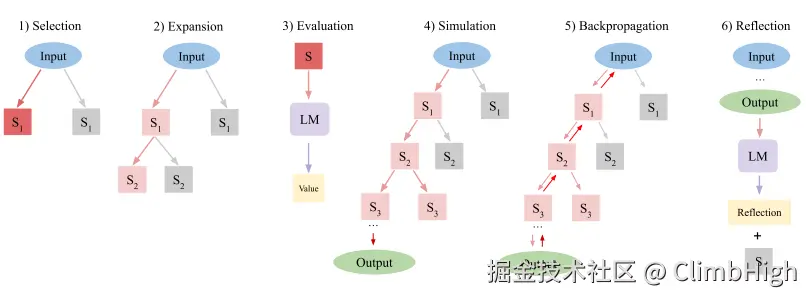
从图上可以看到,它的过程类似普通的回溯算法。只是不是通过代码写死过程,而是让LLM来动态的创建过程。
总结一下过程就是
- 推理扩展:针对当前节点,让 LLM 生成多个可能的下一步(想法/动作)
- 评估与模拟:对每个新节点,直接打分(评估),或快速推演至终局看潜力(模拟),得到初步价值
- 反向传播:将价值沿路径回传,更新上级节点的累计分数
- 选择:根据更新后的分数,挑出最有潜力的节点继续深入
- 若陷入死胡同,则回溯到上一个分支点,并触发反思,生成教训存入记忆,避免后续重蹈覆辙
3. 个人思考
由此可以看出LATS很适合做规划探索可能性而不是实施。
我认为这是一种很适合人机交互的策略:
- 人做什么(定目标、给约束、判断可行性)
- agent 做什么(快速搜索、生成候选、模拟推演、反思沉淀)
- 迭代机制(人看搜索树,剪掉不靠谱分支,注入自己经验,再让 agent 继续搜)
- 这其实是一种“交互式规划”,远比一次性让模型出方案可靠得多。
4. 存在的问题
成本高:每一步都调用多次 LLM(扩展、评估、模拟、反思),复杂任务树很大时,Token 消耗极高。
记忆噪声:反思积累多了,可能出现陈旧或不准确的教训,反而误导后续决策。
对于短平快任务意义不大:简单任务用 CoT 或 ReAct 就够,LATS 有点“牛刀杀鸡”。
如何解决
- 成本高 → 可使用更小的模型做评估/模拟,或限制树的宽度深度
- 记忆噪声 → 引入反思遗忘机制、时间衰减权重,或人工定期清理
- 短任务不适用 → 可以设计一个路由机制,简单任务走轻量链式推理,复杂任务自动升级到 LATS
因此在采用这种方式的时候,有时需要人去介入维护它的经验,防止“坏的经验”累积
5. 代码参考(论文中的)

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 1
1 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)