Solidworks导出URDF及STL模型相关
·
导出URDF
导出URDF文件时,所选的参考轴一定要是场景中根层级的参考轴,而不是零部件中的,否则导出的模型不对。
关于每个关节/link所选用的坐标系和轴,我暂时还是理解得不够透彻。有时假如在场景中选的坐标系和零件本身的坐标系的朝向不一致的话,导出的urdf文件在别的软件中加载后,零件的位置会出现偏移。有时候又不会。
可能最好要保证参考坐标系和零件自身的坐标系保持一致的位置和朝向吧。假如零件坐标系与预期不一致,最好改一下。
假如零件不是自建的且调整坐标系麻烦的话,那可能得自行修改一下导出的urdf文件参数了。😢
导出STL文件
假如我们自行定义好一个坐标系(比如图中的坐标系1),然后希望导出的stl文件的模型的原点以这个设定的坐标系原点重合。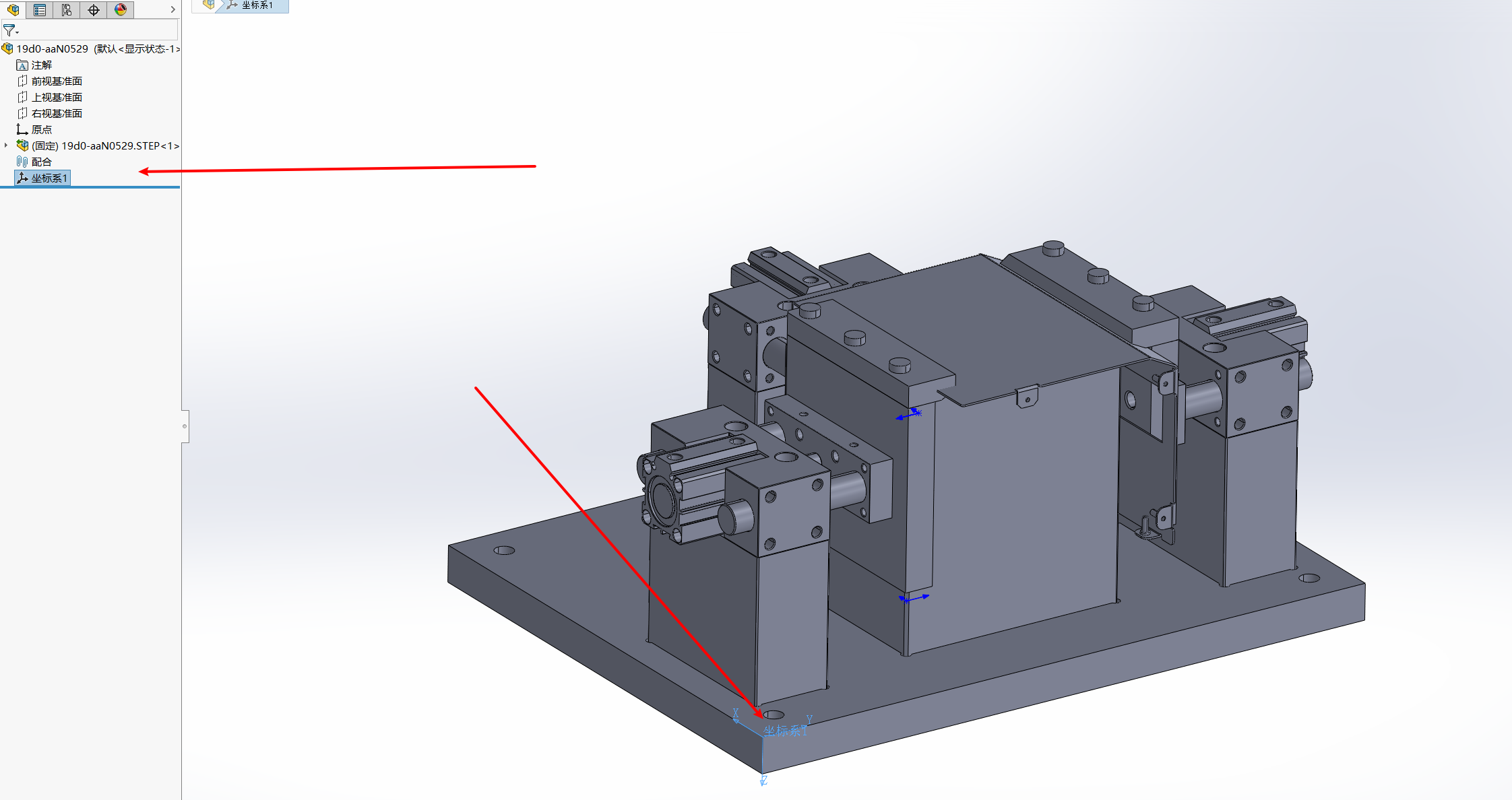
那么注意选项中的这几个: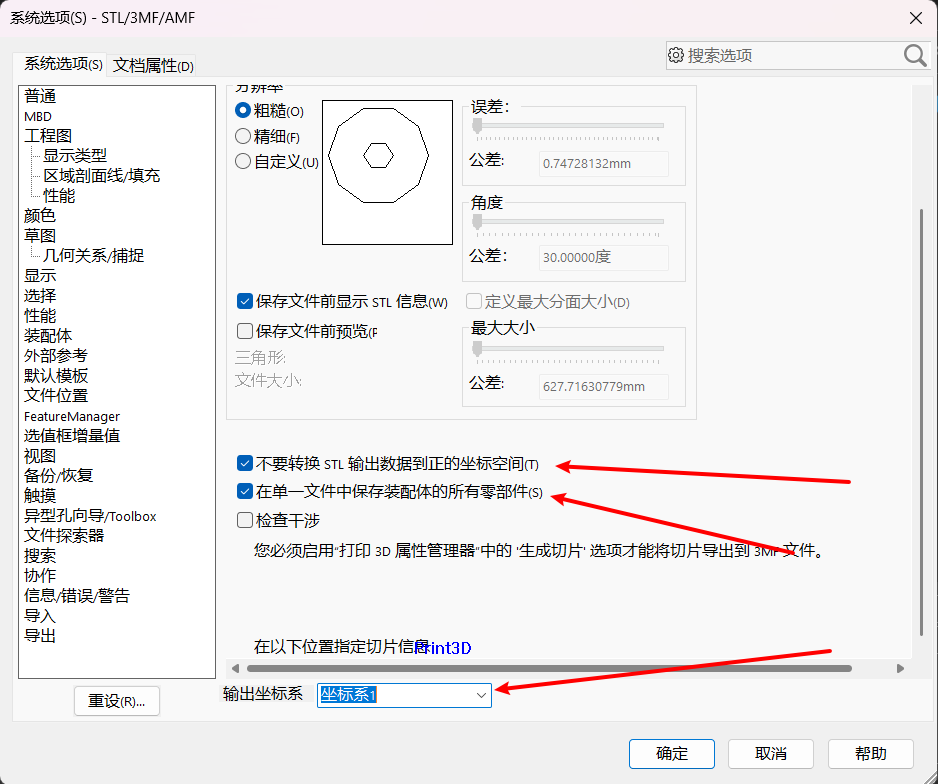
还有这个单位也是重中之重,要选和你的场景符合的: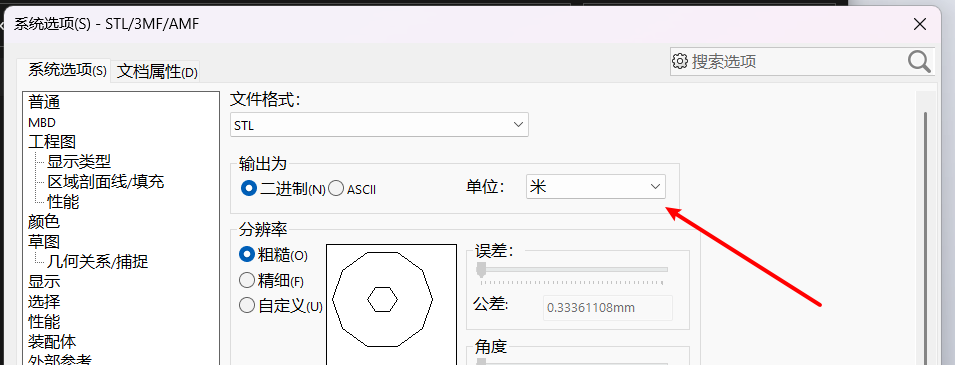

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐



 6
6 0
0- 0



 已为社区贡献4条内容
已为社区贡献4条内容

所有评论(0)