在maixcam2上部署YOLO11-OBB旋转目标检测教程
因为网上资料确认少并且maixcam2算是比较新出的板子,在转化链方面相对于maixcam pro做了比较大一个革新技术故出此教程 ,笔者也算是踩了不少坑所以建议各位学者能利用agent ai进行学习一来文章出了什么纰漏可以指出二来也可以提升诸位的效率(教程从环境搭建开始,如果已经有了yolo11obb的环境可以跳过此部分)教程仅作参考因为我毕竟不是开发人员,只是侥幸成功而已
另外诸位在看我这篇文章前不如先读读官方的教程这比任何教程都要管用!
为 MaixCAM MaixPy 离线训练 YOLO26/YOLO11/YOLOv8 模型,自定义检测物体、关键点检测 - MaixPy
将 ONNX 模型转换为 MaixCAM2 MaixPy 可以使用的模型(MUD) - MaixPy
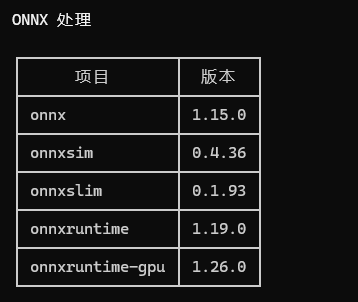
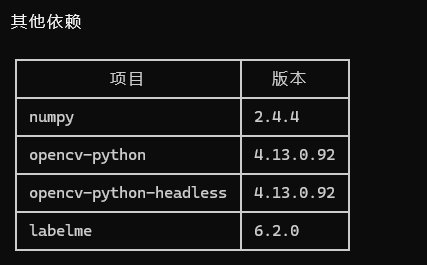
这边贴出全部环境配置
上面有些我踩的坑我后面再说
1.前言
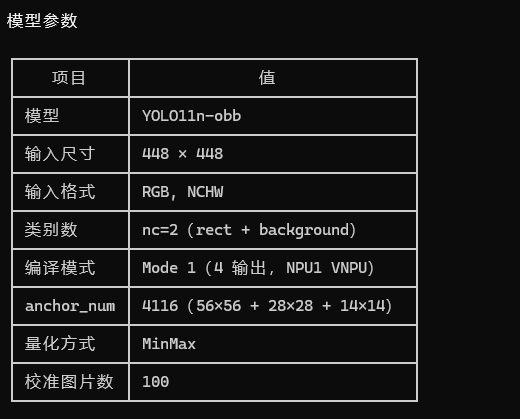
YOLO11-OBB 是 Ultralytics 基于 YOLO11 架构推出的有向边界框(Oriented Bounding Box)检测模型,专门用于检测具有任意旋转角度的目标。与传统的水平边界框不同,OBB 通过增加一个旋转角度参数,能够更紧密地贴合倾斜、狭长或密集排列的物体,有效减少背景干扰,特别适用于遥感图像、航拍影像、文本检测、机器人抓取等场景。
作为 YOLO 家族的一员,YOLO11-OBB 继承了单阶段实时检测的优势,并融合了多项先进设计:在骨干网络中使用改进的 C3k2 模块和通道注意力机制,颈部采用优化的特征金字塔结构,检测头则采用解耦设计并专门输出五参数旋转框(中心点坐标、宽高和角度)。它提供了从 YOLO11n-obb 到 YOLO11x-obb 等多种尺寸的预训练模型,在 DOTA 等权威旋转目标检测基准上达到了精度与速度的优越平衡,既适合高精度离线分析,也能满足边缘端实时推理的需求。
凭借简洁易用的 API 和丰富的生态支持,YOLO11-OBB 大幅降低了旋转目标检测的落地门槛,成为当前兼顾性能与工程实用性的代表性方案之一。
2.检查电脑相关配置
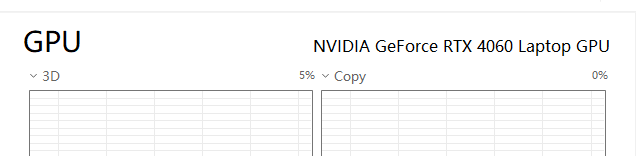
深度学习训练依赖 NVIDIA 独立显卡进行 GPU 加速。如果没有 NVIDIA 显卡(例如只有集成显卡或 AMD 显卡),则只能使用 CPU训练,速度会慢数十倍,基本不具备实用性。
如何确认自己有没有 NVIDIA 独立显卡:
1. 按 Ctrl + Shift + Esc 打开任务管理器
2. 点击 "性能" 选项卡
3. 左侧列表中找到 "GPU",查看右侧显示的显卡型号
4. 如果型号中包含 "NVIDIA" 或 "GeForce/RTX" 字样,说明有独立显卡,可以用于训练
如果不确定看到的是不是独立显卡,把型号名称复制到搜索引擎查一下即可。
3.安装yolo11OBB训练所需要的软件(这里我就简写一点了毕竟网上很多搜得到)
安装 Anaconda3和pycharm以及安装cuda及cudnn等都可以查看这篇文章,人家已经写得很详细了我这里就不细说了,我当初也是跟着人家来的主要是看自己显卡的版本是多少(注意版本版本版本!!!这个教程用的是老一点的版本当然我没试过可以用当我没说)目标检测:YOLOv11(Ultralytics)环境配置,适合0基础纯小白,超详细-CSDN博客
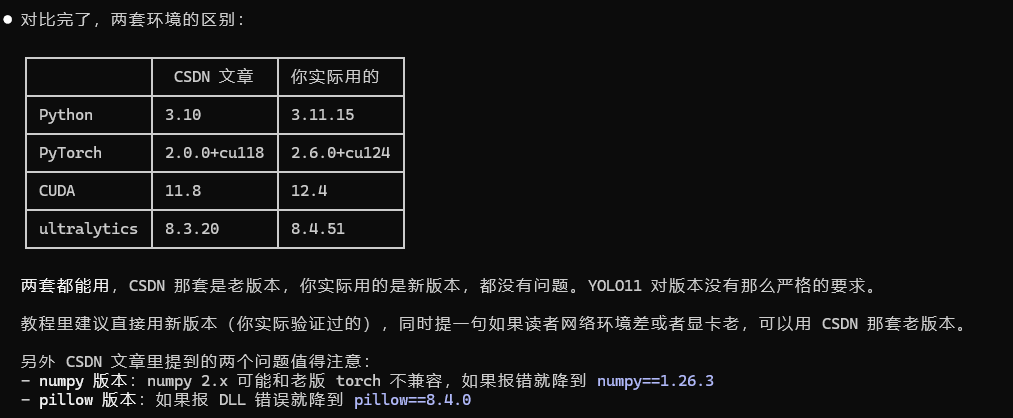
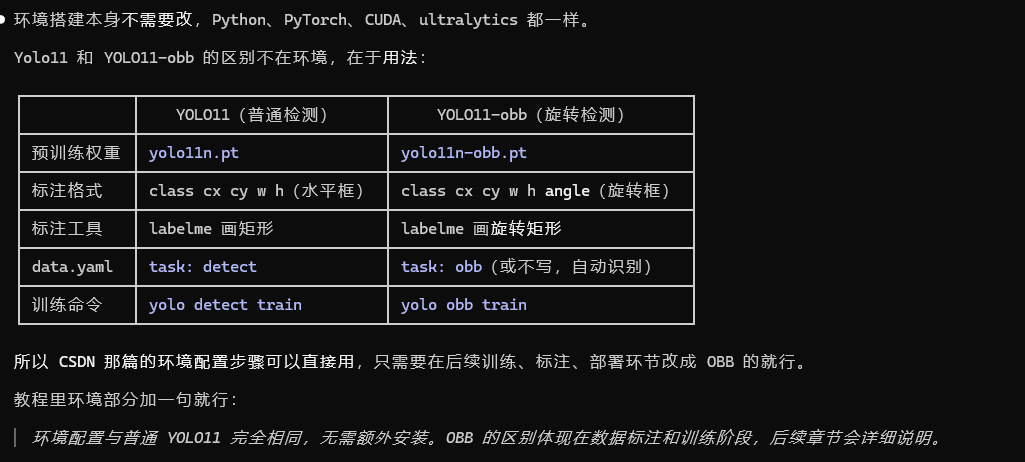
关于别人教程是yolo11而我们用的是yolo11obb有什么要注意的(真心建议诸位用agent太方便了)
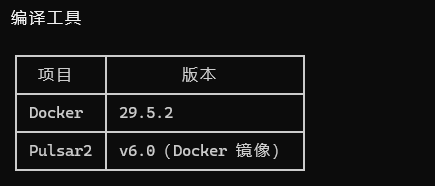
安装 Docker Desktop + 导入 Pulsar2 镜像(这是maixcam2转化环境需要到的)
1. 安装 Docker Desktop
1. 打开 https://www.docker.com/products/docker-desktop/(看这个一篇就够!Windows上Docker Desktop安装 + 汉化完整指南(包含解决wsl更新失败方案)_docker汉化-CSDN博客)都不细说,安装个软件没有什么难的
2. 点击 Download for Windows 下载安装包
3. 双击运行安装程序
4. 安装过程中:
- 勾选 "Use WSL 2 instead of Hyper-V"(推荐)
- 其他保持默认,一路 Next
5. 安装完成后重启电脑
6. 重启后打开 Docker Desktop,等待启动完成(任务栏 Docker 图标变绿色鲸鱼)
7. 验证安装成功,打开命令行输入:
docker --version能显示版本号就行。
▎ 注意:Docker Desktop 需要开启虚拟化。如果启动报错,进 BIOS 开启 Intel VT-x 或 AMD-V。
2. 导入 Pulsar2 编译器镜像
Pulsar2 是把 ONNX 模型编译成 MaixCAM2 能用的 axmodel 格式的工具,以 Docker 镜像方式提供。
获取镜像文件:AXERA-TECH/Pulsar2 at main(国内好像访问不了)
或者找你的官方卖家或去 Sipeed 官方资料下载 pulsar2_v6.0.tar(或类似文件名)。
导入镜像:
打开命令行,进入 tar 文件所在目录,执行:
docker load -i pulsar2_vxx.tar.gz
等待导入完成,会显示类似 Loaded image: pulsar2:6.0 的提示。
验证:
docker images | findstr pulsar2能看到 pulsar2 镜像就说明导入成功。
再测试能不能运行:
docker run --rm pulsar2:6.0 pulsar2 --version▎ 注意:这里不要写 /bin/bash -c,Pulsar2 镜像的 ENTRYPOINT 已经是 bash,重复写会报错。
总结环境
基础环境配置就这些了。总结一下:
电脑端:
1. 安装 Anaconda3(自带 Python)
2. 安装 PyCharm(可选)
3. 创建 conda 环境 + 安装依赖
4. 确认 GPU 能用
5. 安装 Docker Desktop + 导入 Pulsar2 镜像
设备端:
6. 烧录 MaixCAM2 系统镜像
7. 连接设备(USB/WiFi)+ SSH 登录验证
接下来就是数据标注 → 训练 → 导出 → 编译 → 部署了。(等我明天更新)
4.准备数据并且进行数据标注
4.1数据准备阶段
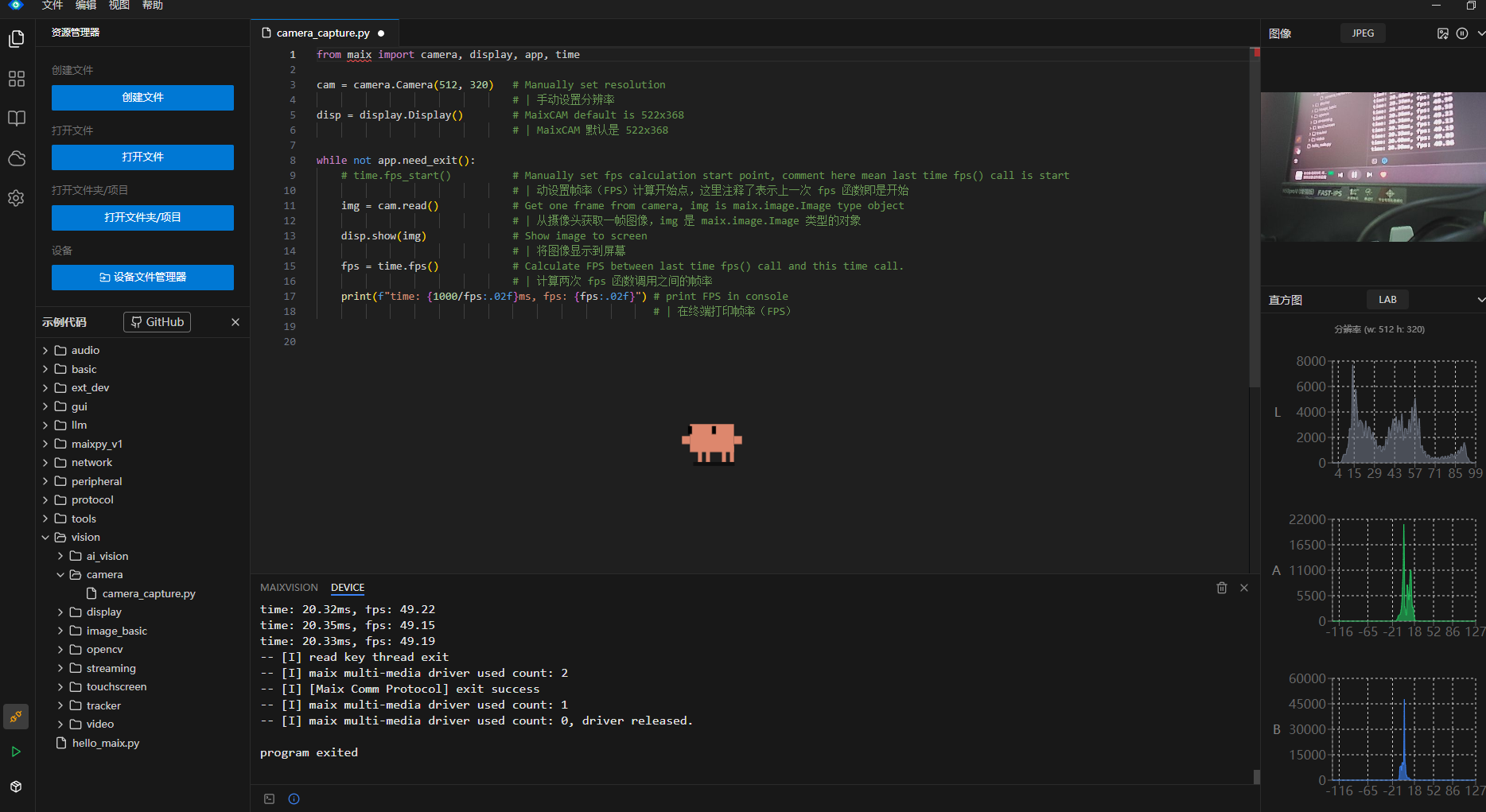
这个也简单不用多说,就是用你手上的maixcam去拍照(这边注意一下分辨率还有就是maixcam2下打开屏幕显示和不打开有一定的帧率影响看个人,笔者喜欢448*448的分辨率NPU推理就1ms)
教你从零开始在MaixCAM上部署自己本地训练的Yolov5模型(2)- 数据集的准备-CSDN博客
例程也有打开摄像头的代码,不会的先去补补基础

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 0
0 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)