【RobotStudio 实战】工业机器人激光切割工作站搭建、轨迹优化与碰撞仿真全流程解析
前言:为什么离线编程对激光切割至关重要?
在工业机器人激光切割应用中,切割轨迹通常非常复杂(包含大量的曲线和不规则边缘)。如果采用传统的示教器手动在线示教,不仅效率极低,而且难以保证切割精度和出光连续性。
利用 RobotStudio 的离线编程功能,我们可以直接基于工件的 3D 模型自动提取复杂的三维运动轨迹。本文将带你从零开始,一步步掌握激光切割工作站搭建、离线路径自动生成、目标点姿态调整、运动程序优化以及碰撞监控的全流程核心技能。
一、 激光切割工作站搭建与离线路径自动生成
在开始编程前,首先需要搭建好工作站的物理场景,并基于工件边缘建立运动坐标系与初始离线轨迹。
1.1 场景搭建与工具安装
-
新建工作站: 打开 RobotStudio,新建一个空工作站,并命名为
jgqg工作站。 -
导入核心设备: 在“基本”功能选项卡中,分别导入机器人模型
IRB2600、激光切割工具MyTool。 -
安装工具: 将工具
MyTool拖动并安装到机器人的法兰盘上。 -
导入周边几何体: 通过“导入几何体” → “浏览几何体”,导入“工作站平台”和“待加工工件”,并将其移动到合适的作业位置。
1.2 创建工件坐标系(Wobj)
为了确保轨迹与工件完全绑定,需要采用“三点法”为切割工件建立独立的工件坐标系:
-
操作路径: 基本→其他 →创建工件坐标。
-
参数设定: 在弹出的对话框中,将“用户坐标框架”下的取点方式改为 “三点” 法。通过捕捉工具依次捕捉工件表面的三个基准点,单击“Accept”并创建,生成
Workobject_1。
1.3 设置离线指令格式与自动生成轨迹
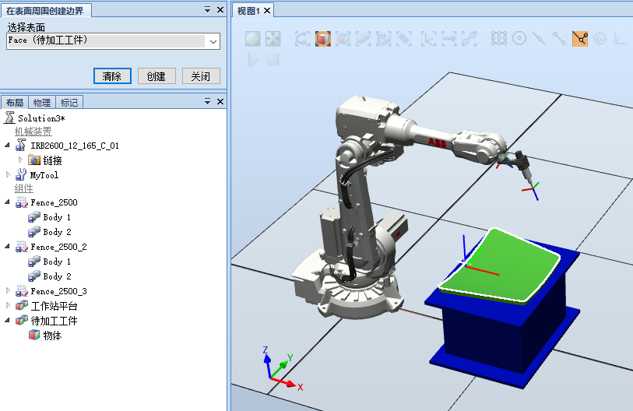
-
指令基础设置: 在“基本”选项卡中,将当前的默认任务设为
System5 T_ROB1,工件坐标设为Workobject_1,工具设为MyTool。同时,在“设置”中提前修改好轨迹指令的默认运动速度、转角半径(Zone值)等工艺参数。 -
提取离线轨迹: 在“基本”功能选项卡中单击 “路径” → 选择 “自动路径”。将工具切换为 “选择曲线”,直接捕捉之前导入的工件表面激光切割边缘曲线(例如
离线轨迹曲线),系统将基于该模型曲线自动生成一系列密集的离线目标点及初始路径Path_10。
二、 轨迹目标点工具姿态与轴配置参数的调整
自动生成的初始轨迹往往无法直接运行,因为部分目标点处的工具姿态可能超出了机器人的物理极限(如关节限位、奇异点等),必须进行针对性调整。
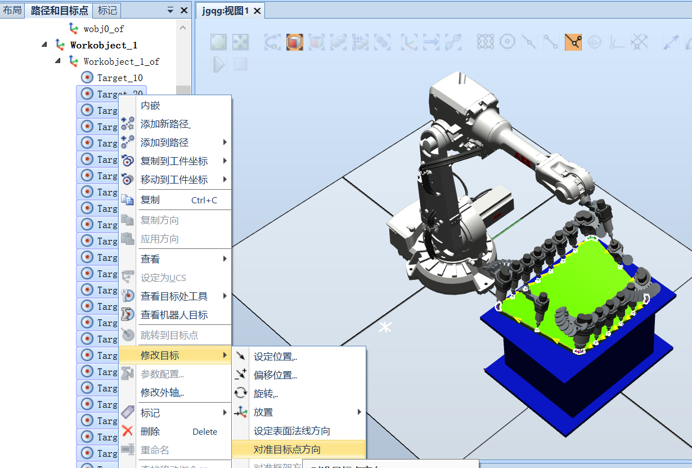
2.1 查看与修改目标点工具姿体
-
查看姿态: 在左侧“路径和目标点”树状菜单中展开
Workobject_1,选中目标点(例如Target_10),右键选择 “查看该点处的工具”。如果发现某些点处工具姿态异常、关节翻转甚至机器人无法到达,则需要进行修正。 -
旋转目标点: 右键单击需要修改的目标点
Target_10→ 修改目标→ 旋转。在对话框中将“参考”设为 “本地”(Local),设置旋转角度(例如沿 Z 轴旋转-90度),单击应用。 -
批量调整处理: 在激光切割任务中,通常所有目标点的 Z 轴方向均为工件表面的法线方向(即切割枪垂直于表面),无须修改。我们可以按住
Shift键 批量选中剩余的所有目标点,右键统一修改它们的 X 轴或 Y 轴旋转方向,使其工具姿态保持平滑一致。
2.2 轴配置参数(ConfJ)的调整
即使工具姿态正确,机器人也有多种关节组合方式(轴配置)来到达该点。
-
检查轴配置: 右键单击目标点,选择 “轴配置”,系统会列出当前姿态下的所有可行关节逆解方案。
-
自动配置: 为了提高效率,可以在左侧选中整条路径
Path_10,右键选择 “自动配置轴参数”(Auto Configuration),让系统自动计算并匹配整条轨迹中过渡最平滑、最不易引起关节突变的轴配置方案。
三、 离线程序图形化优化与仿真运行设置
为了确保生产安全并保护激光头不被撞击,我们需要在正式切割前加入“接近点”(Approach)、“离开点”(Depart)以及安全的“家点”(Home)。
3.1 创建轨迹起始接近点与结束离开点
-
接近点(pApproach): 起始接近点用于让机器人在出光前先快速移动到切割起点上方。右键单击切割起点
Target_10→ 创建偏移目标点,将其沿工具坐标系 Z 轴负方向(即安全抬起方向)偏移一段距离。创建后将其重命名为pApproach。 -
离开点(pDepart): 切割结束后,激光头需要安全抬起。参考上述步骤,复制路径的最后一个切割点
Target_290,沿 Z 轴负方向做偏移调整,重命名为pDepart。 -
加入路径: 展开“路径与步骤”,将
pApproach拖动或右键添加到Path_10的 “第一行”;将pDepart添加到Path_10的 “最后一行”。
3.2 创建安全位置点(pHome)并优化指令
-
定义 Home 点: 本任务中将机器人的默认机械原点设为安全位置。在“布局”选项卡中右键机器人,选择 “回到机械原点”。
-
示教 Home 点: 将工件坐标系临时切回
Wobj0,单击 “示教目标点”,将该原点位置命名为pHome。之后分别将pHome添加到Path_10的 最开始和最末尾。 -
优化运动动作: 为了缩短非加工时间,展开
Path_10,将机器人从pHome移动到pApproach以及从pDepart返回pHome的大范围空走轨迹指令,由相对缓慢的直线运动(MoveL)统一修改为快速的轴运动(MoveJ)。
3.3 同步与仿真参数设定
-
同步到 RAPID: 优化完成后,单击“基本” → “同步” → “同步到RAPID”,勾选所有路径与数据,将图形化调整的数据写入后台代码。
-
设定仿真参数: 在“仿真”选项卡中单击 “仿真设定”。将“进入点”设置为当前任务的
Path_10。
四、 工作站碰撞监控与 TCP 轨迹跟踪检测
在正式执行仿真播放前,必须开启碰撞监控和 TCP 跟踪,这是验证离线编程轨迹安全性和加工质量的核心手段。
4.1 工业机器人碰撞监控功能(Collision Detection)
碰撞监控能够自动检测机器人在运动中是否会与周边工装发生干涉。
-
创建监控: 在“仿真”功能选项卡中,单击 “创建碰撞监控”,系统会自动在左侧树状栏生成
碰撞检测设定_1。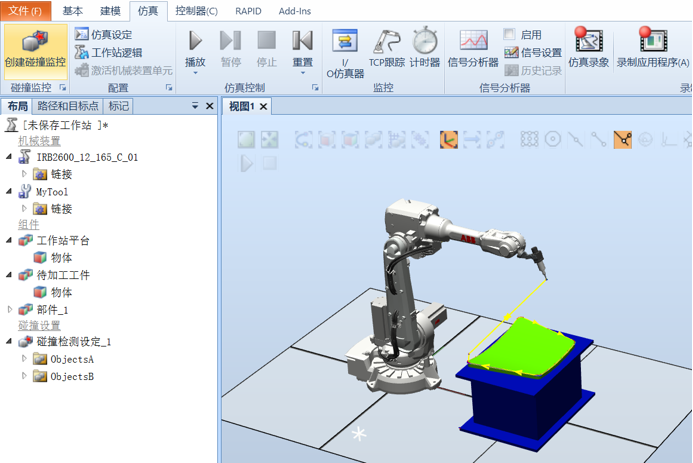
-
划分检测对象组: 双击展开该设定,会显示
ObjectsA和ObjectsB两组对象列表。在“布局”窗口中:-
将机器人末端工具
MyTool拖入 ObjectsA。 -
将周边物理环境
工作站平台、待加工工件拖入 ObjectsB。
-
-
参数修改: 右键单击
碰撞检测设定_1→ “修改碰撞监控”。将“接近丢失”(Near Miss)设置为2mm(即当工具距离平台小于 2mm 时系统会发出黄色的接近警告;若真正发生物理重叠则触发红色的碰撞提示,并在输出窗口记录详细的报错位置)。
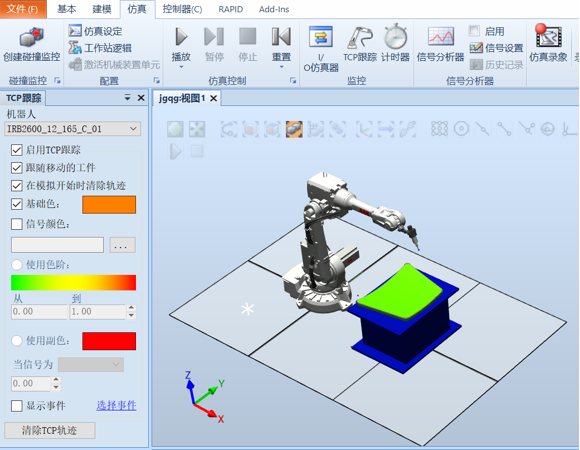
4.2 TCP 跟踪功能(TCP Trace)的使用
TCP 跟踪用于将机器人激光枪头的实际运动轨迹以彩色线条的形式记录下来,方便工程师目测检查轨迹是否圆滑、有无抖动或跑偏。
-
开启 TCP 跟踪: 在“仿真”选项卡中,单击 “TCP跟踪” 下拉菜单,选择 “启用TCP跟踪”。
-
设置跟踪参数: 进入“修改TCP跟踪”设置窗口,将跟踪类型设为
当前工具(MyTool),并可以自定义线条的颜色、粗细以及保留时长。
4.3 终期仿真运行验证
-
一切配置就绪后,在“仿真”功能选项卡正上方单击 “播放”(Play)按钮。
-
全自动化运行呈现: 机器人首先以 MoveJ 姿态快速从安全原点
pHome移动到切割起点的上方接近点pApproach;随后下行至切割起点,开始严格顺着工件的复杂 3D 边缘进行精准的激光切割运动。 -
检测结果评估: * 观察图形视图中,TCP 跟踪线完美贴合工件加工边缘,证明切割轨迹精度达标。
-
检查整个运动周期内,机器人工装和工具均没有触发黄色的接近警告或红色的碰撞报错,输出窗口也无任何异常干涉记录。
-
切割完成后,机器人安全抬起至
pDepart,并平稳退回pHome机械原点,整站离线编程与轨迹仿真完美闭环交付!
-
如果你在实战配置过程中遇到了碰撞报警、轴超限或自动路径无法提取等常见离线编程问题,欢迎在评论区留言讨论!点赞、收藏不迷路,持续更新更多工业机器人高级离线编程与数字孪生仿真教程!

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 9
9 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)