按照飞行高度分别300米和100米的AIBrainBox-GNSS拒止环境下的视觉-结构融合导航解决方案分析
按照飞行高度分别300米和100米的AIBrainBox-GNSS拒止环境下的视觉-结构融合导航解决方案分析
任务约束
-
高度:
-
方案A:300 m
-
方案B:100 m
-
-
速度:≤15 m/s
-
GNSS状态:
-
GNSS OK → GNSS拒止 → GNSS恢复
-
-
拒止时长:10–20分钟
-
飞行器:
-
机型:DJI Matrice 350 RTK
-
-
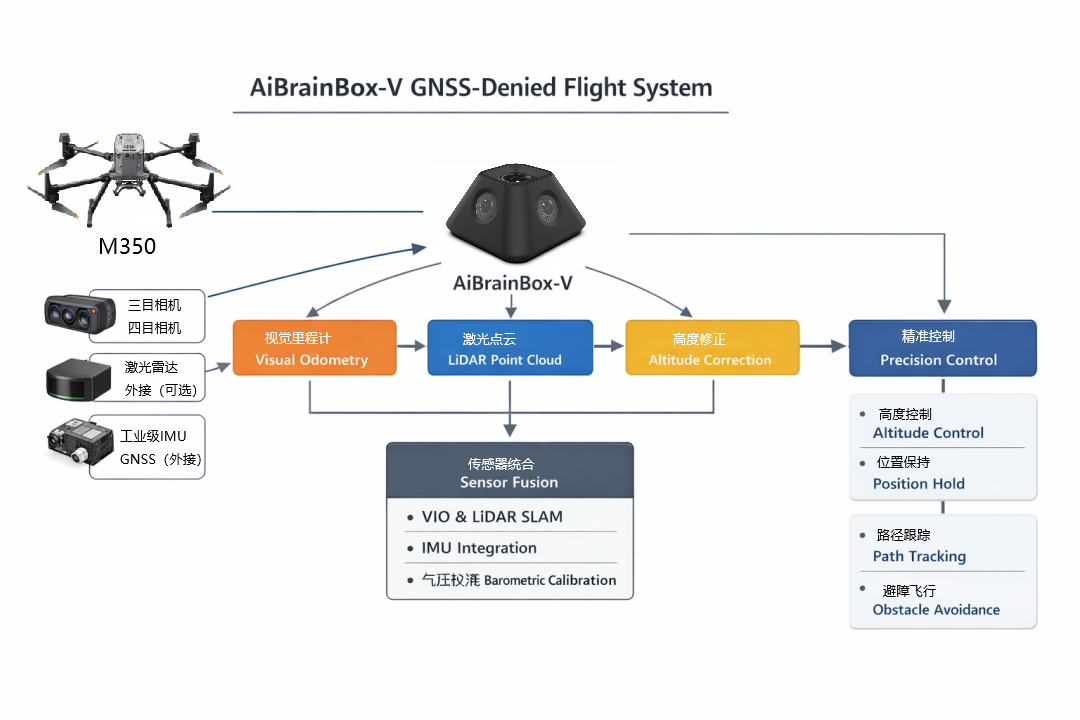
总体技术方案
1️⃣ GNSS拒止导航能力设计
|
模块 |
技术路线 |
|---|---|
|
主定位 |
VIO(视觉惯性里程计) |
|
辅助定位 |
LiDAR SLAM(可选) |
|
惯导 |
工业级IMU(闭环) |
|
高度 |
激光测距/气压融合 |
|
地图匹配 |
预建图 + 重定位 |
|
任务恢复 |
GNSS重捕获融合 |
核心能力:
-
GNSS丢失后误差 < 1–3%(航程)
-
支撑 10–20 min 连续飞行
-
支持闭环回归(Loop Closure)
300米GNSS拒止
在300米GNSS拒止场景,通过“视觉惯导+下视测距”即可实现稳定飞行,引入面阵LiDAR可进一步提升在复杂环境和长时间任务中的鲁棒性。
在300m GNSS拒止 10–20min场景:
Z轴不能依赖单一传感器(不管是激光测距还是气压计)
必须走:
“弱观测 + 约束 + 低频校正”的融合路线
|
模块 |
频率 |
|---|---|
|
IMU积分 |
100–200 Hz |
|
VIO输出 |
20–50 Hz |
|
Z约束(激光/视觉) |
1–5 Hz(关键) |
高频:IMU + VIO(主)
低频:Z约束(纠偏)
-
300米高度 Z轴漂移问题(核心难点)
在300m高度,Z轴(高度)漂移是第一风险项,原因是:
-
视觉深度尺度不稳定(远距离纹理稀疏)
-
IMU在Z方向误差累积更快
-
无GNSS时高度缺乏绝对参考
✔️ 倾斜前向 LiDAR(核心)
看前方 + 看地面结构
👉 提供:
-
3D结构
-
相对高度变化
-
回环约束
Z = IMU(高频)
+ VIO(主)
+ 视觉几何约束(地面/结构)
+ LiDAR结构(可选)
+ 低频校正(激光/气压)
-
三目全局快门相机(参数 + 布局)
✅ 推荐布局(非常关键)
前视
↑
左视 ← ● → 右视
↓
下视(可选增强)
🎯 标准三目配置(推荐)
|
位置 |
作用 |
|---|---|
|
前视 |
主VIO |
|
左/右 |
提供视差 + 抗旋转 |
|
下视(建议增加) |
增强Z轴稳定(关键) |
👉 结论:三目 + 下视 = 最优解
📷 相机参数建议(工业级)
|
参数 |
要求 |
|---|---|
|
快门 |
全局快门(必须) |
|
分辨率 |
1–2MP(最佳) |
|
帧率 |
≥30fps(推荐60fps) |
|
像素尺寸 |
≥3μm(低光更好) |
|
动态范围 |
≥70dB |
|
同步 |
硬件同步(必须) |
🎯 推荐Sensor组合
-
前视:SC130(全局,高帧率)
-
下视:SC850(低照+稳定)
-
侧视:SC635(补充纹理)
-
地图匹配 / 预存地图要求
|
场景 |
是否需要 |
|---|---|
|
普通巡检 |
❌ 不必须 |
|
长时间拒止 |
✅ 建议 |
|
高精度任务 |
✅ 必须 |
🗺️ 地图类型
1️⃣ 稀疏地图(推荐)
-
特征点地图(ORB / FAST)
-
存储小(MB级)
2️⃣ 稠密地图(高端)
-
点云地图
-
精度高但算力要求大
📦 地图要求
|
项目 |
要求 |
|---|---|
|
精度 |
<10cm |
|
覆盖范围 |
飞行区域 |
|
更新周期 |
可离线更新 |
|
存储 |
1–10GB |
🎯 核心能力
-
GNSS恢复前 → 视觉定位
-
GNSS恢复后 → 地图对齐(消漂移)
🎯 标准客户(90%场景)
👉 用:
-
VIO + IMU
-
稀疏地图(可选)
👉 不用LiDAR
100m高度GNSS拒止
- 100m高度GNSS拒止飞行完全可以不依赖LiDAR实现
- 推荐采用VIO+IMU方案,性价比最高
100m高度 → 完全可以用「VIO + IMU」作为主方案,无需强依赖LiDAR
这会显著降低成本 + 提升稳定性 + 简化系统
100m场景关键技术指标
🎯 定位能力
-
GNSS拒止漂移:≤1–2%(航程)
-
20分钟飞行:误差可控在 10–30m
🎯 稳定性
-
连续飞行:≥20分钟
-
视觉丢失恢复:≤2秒
🎯 切换能力
-
GNSS → VIO:无缝切换
-
GNSS恢复:自动对齐
配置方案
🎯 标准版
-
三目 + IMU + VIO
-
无LiDAR
👉 成本最低、稳定性够用
🎯 增强版
-
三目 + 下视 + IMU
👉 抗漂移能力更强
🎯 高端版
-
多目 + IMU + LiDAR(轻量)
👉 用于: -
城市场景
-
纹理差环境
-
夜间
GNSS拒止飞行系统(300m / 20min)完整技术包
1. 系统总体架构图
┌──────────────────────────────┐
│ Mission Layer │
│ Path Planning / Task Logic │
└────────────┬─────────────────┘
┌────────────▼────────────┐
│ State Estimation │
│ (Fusion Core - VIO) │
└──────┬───────┬──────────┘
┌────────────────▼──┐ ┌──▼────────────────┐
│ Visual Odometry │ │ IMU Preintegration │
│ (Front + Side) │ │ 100-200Hz │
└───────────────────┘ └────────────────────┘
┌────────────────▼──────────────┐
│ Constraint Layer │
│ - Ground Plane (Vision) │
│ - LiDAR Structure (Optional) │
│ - Low-rate Height Constraint │
└────────────┬─────────────────┘
┌──────────▼──────────┐
│ Control Layer │
│ Position/Velocity PID│
└──────────┬──────────┘
┌──────────▼──────────┐
│ Flight Controller │
│ (PX4 / DJI PSDK) │
└──────────────────────┘
2. 融合框架图(Factor Graph / EKF)
State X = {Position, Velocity, Orientation, Bias}
Sensors:
IMU → High-frequency propagation
Camera → Relative pose constraint
LiDAR → Structural constraint
Height (optional) → weak constraint
Σ IMU residual
+ Σ Visual reprojection error
+ Σ LiDAR geometry error
+ Σ Height constraint error
3. 三目 + LiDAR 融合架构图
Front Camera│
Left Camera ──┼── Right Camera│
Down Camera (optional)│
┌───▼────────────┐
│ VIO Module │
└───┬────────────┘│
┌────────▼────────┐
│ LiDAR SLAM │
│ (Structure Only)│
└────────┬────────┘│
┌────────▼────────┐
│ Fusion Backend │
│ (EKF/FactorGraph)
└────────┬────────┘│
┌────────▼────────┐
│ Flight Control │
└──────────────────┘
4. Z轴误差仿真模型
模型假设:
-
飞行高度:300m
-
速度:10 m/s
-
时间:20 min
误差来源:
Z_error(t) = IMU_bias * t + Visual_scale_drift + Noise
加入约束:
Z_error_corrected(t) = Z_error(t) - λ1 * PlaneConstraint - λ2 * LiDARConstraint
结论:
-
无约束:指数漂移
-
VIO+IMU:线性漂移
-
加约束:收敛
6. GNSS拒止20分钟误差模型
位置误差:
E_xy(t) ≈ v * drift_ratio * t
其中:
-
drift_ratio ≈ 0.5% – 2%
Z误差:
E_z(t) ≈ k1 * t + k2 * constraint_correction
典型结果:
|
时间 |
XY误差 |
Z误差 |
|---|---|---|
|
5 min |
5–10m |
3–5m |
|
10 min |
10–20m |
5–10m |
|
20 min |
20–40m |
10–20m |
加入LiDAR:
Z误差 ↓ 30–60%
7. 核心工程结论
-
Z轴必须靠“约束”而不是“测量”
-
LiDAR用于结构,不是测距
-
低频校正是关键(1–5Hz)
-
20分钟GNSS拒止完全可控
Q&A
1️⃣ 为什么不用激光测距?
👉 回答:
-
300m高度测距本身不可靠
-
采用“结构约束 + 视觉几何”
-
稳定性更高
2️⃣ 为什么比传统VIO更稳?
👉 回答:
-
我们不是纯VIO
-
是:
-
多目VIO(主)
-
IMU(高频)
-
结构约束(核心差异)
-
低频校正(防漂移)
-
3️⃣ 20分钟误差为什么可控?
👉 回答:
-
漂移不是发散的,而是被约束“拉回”
-
系统本质是:
漂移 + 约束 = 收敛
👉 技术名称
- GNSS-Denied Navigation System (GDN System)
-
或:
- Vision-Structure Fusion Navigation (VSFN)
👉 中文卖点
-
“视觉-结构融合导航”
-
“无GNSS环境稳定飞行系统”
✅ 结构约束是什么(本质)
利用环境几何结构,对位姿(尤其Z轴)施加约束
|
来源 |
是否属于结构约束 |
|---|---|
|
视觉几何(地面/建筑) |
✅ |
|
LiDAR点云结构 |
✅ |
|
地图匹配 |
✅ |
|
纯IMU |
❌ |
|
激光测距(单点) |
❌(太弱) |
结构约束(Concept)
├── 视觉结构约束(VIO增强)
├── LiDAR结构约束
│ ├── 简化版(只约束)
│ └── LiDAR SLAM(完整系统)
└── 地图匹配约束
标准版
视觉结构约束导航(无LiDAR)
增强版
视觉 + LiDAR结构约束融合导航
核心不是依赖SLAM,而是通过多源结构约束实现稳定定位。
LiDAR在系统中主要用于提供环境结构信息,增强高度和姿态的稳定性,而不是单独依赖SLAM进行导航。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 9
9 0
0- 0



 已为社区贡献21条内容
已为社区贡献21条内容

所有评论(0)