差速底盘还是四轮四转?ROS2 机器人底盘选型与应用场景分析

参考文档:
ROS2 Control 官方控制器文档:https://control.ros.org/
ROS2 diff_drive 官方参数手册:https://control.ros.org/master/doc/ros2_control_controllers/doc/diff_drive_controller.html
松灵官方 ROS2 开源驱动仓库(四驱四转 / 差速底盘源码、运动学插件、URDF、仿真包):https://github.com/agilexrobotics
一、底盘架构是ROS2导航精度的核心瓶颈
在ROS2 Humble、Iron、Rolling主流开发生态中,机器人SLAM建图、自主导航、轨迹跟踪、动态避障等功能的性能上限,从来不取决于雷达、IMU等传感器,而是由底盘运动约束决定。
很多研发团队存在普遍认知误区:认为硬件配置越高越好,盲目选用四轮四转高端底盘,或为压缩成本全程使用四轮差速底盘,最终出现两类典型工程问题:
1. 四轮差速底盘:室内窄仓储通道无法通行、频繁转向打滑、导航累积误差持续放大,定点停靠精度不达标;
2. 四轮四转底盘:户外开阔场景控制冗余、参数调试复杂、算力资源浪费,且无必要的结构损耗提升运维成本。
为解决ROS2开发者的选型痛点,本文将从运动学理论、ROS2控制逻辑、场景边界三大维度,客观拆解两种底盘的核心差异,明确不同工况下的最优技术方案。同时结合工业级成熟底盘的通用设计逻辑,辅助开发者快速落地项目。
二、底层原理:四轮差速 vs 四轮四转运动学核心拆解
底盘的所有性能差异(精度、灵活性、误差、适配性),根源都是运动学模型不同。本节通过核心公式与原理分析,从底层讲透二者本质区别。
2.1 四轮差速驱动:追求极致可靠的“硬核派”
四轮差速底盘采用左右轮分组驱动逻辑,通过左右车轮转速差实现转向,是ROS2中通用的底盘架构。
核心运动学公式(线速度、角速度):
其中:,
为左右轮线速度,
为轮距,
为底盘中心总线速度,
为旋转角速度
运动特性分析:
-
运动表现(原地掉头): 就像圆规一样,它可以绕着底盘中心原地自旋。虽然它不能像螃蟹那样直接横着走,但结构简单耐用,操作逻辑直观,不挑场地。
-
转向原理(受控打滑): 它没有专门的转向“方向盘”,而是靠左右两边轮子的速度差,强行拖拽轮胎在地面上打滑形变来完成转弯。
-
误差特性(开环磨损): 由于转弯全靠“硬磨”,转向过程会产生不可控的轻微滑动。这就像在冰上走路,走得越远、转弯越多,位置的微小偏差就会慢慢堆积,需要靠顶层的导航算法来实时修正。
2.2 四轮四转底盘(4W4S)运动学模型
四轮四转全称四轮独立驱动、四轮独立转向,每个车轮配备独立驱动电机与转向舵机,具备完整的角度闭环控制,支持多运动模式切换,包含直行、阿克曼转向、全向横移、原地零半径旋转等。
核心运动特性:
-
运动表现(闭环矢量): 每一个轮子都有独立的“大脑”控制角度和速度。通过四轮协同,机器人从简单的差速控制进化到了精准的全方向控制,消除了运动的不确定性。
-
自由度(螃蟹横移): 它支持“蟹行”模式——四轮可以同步转向。这意味着底盘不需要掉头,就能直接实现平行横移。在狭窄通道或精准对接场景下,它具备完美的灵活性。
-
物理性能(纯滚动):它的转向是“顺着走”而不是“磨着转”。轮胎始终处于纯滚动状态,几乎没有多余的摩擦损耗。这不仅保护了轮胎,还让机器人的行走轨迹像激光切割一样精准可预测。
-
误差特性(硬件精度):它的误差不再来自于地面的打滑,而是来自于机械本身。比如零件之间的缝隙、传感器的精度或是出厂时的零点校准是否精细。
2.3 两种底盘核心误差机制对比
|
底盘类型 |
核心误差来源 |
误差性质 |
典型位姿偏差(单次 90° 转向) |
|
四轮差速 |
转向滑移、轮胎形变、地面摩擦不均 |
原理性固有误差(不可消除) |
8 ~ 15cm (受地面摩擦影响大) |
|
四轮四转 |
机械间隙、零点校准偏差、编码器精度 |
硬件误差(可校准优化) |
0.5 ~ 3cm (受硬件精度影响) |
三、ROS2生态适配对比
ROS2的控制器架构、驱动适配难度、参数调优逻辑,直接决定项目开发周期与运行稳定性。
3.1 四轮差速:原生零门槛适配,新手友好
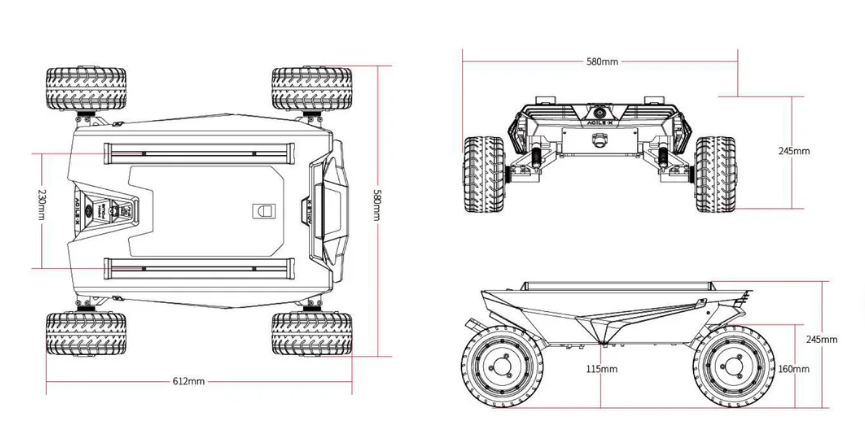
ROS2官方控制器库原生内置diff_drive_controller,无需自定义运动学插件、无需复杂建模,开箱即用。松灵SCOUT系列的差速底盘,适配原生控制器,是科研验证、快速原型开发的首选。
可复用YAML通用参数配置
controller_manager:
ros__parameters:
update_rate: 100
diff_drive_controller:
type: diff_drive_controller/DiffDriveController
left_wheel_names: ["left_rear_wheel", "left_front_wheel"]
right_wheel_names: ["right_rear_wheel", "right_front_wheel"]
wheel_separation: 0.55
wheel_radius: 0.12
publish_rate: 50
odom_frame_id: odom
base_frame_id: base_link-
适配优势:极简开发。调试门槛低,里程计反馈稳定可靠,社区生态完善,是快速原型开发与大批量部署的首选方案。
-
适配短板:场景受限。缺乏横向平移能力,在极小空间转运、复杂轨迹微调及高精度对接任务中,机动效率相对受限。
3.2 四轮四转:专属插件封装,解决ROS2原生适配空白
ROS2 官方控制器库目前缺乏成熟的四轮独立驱动与独立转向(4WD-4WS)控制器,原生 ackermann_steering_controller 仅适配两轮转向模型。松灵RANGER系列针对 4WS 模型提供了完备的运动学扩展插件与控制闭环,补齐了 ROS2 控制框架对多自由度矢量运动的支持。
可复用YAML通用参数配置:
controller_manager:
ros__parameters:
update_rate: 100
four_wheel_steering_controller:
type: agilex_steering_controller/FourWheelSteeringController
front_wheels: ["front_left_wheel", "front_right_wheel"]
rear_wheels: ["rear_left_wheel", "rear_right_wheel"]
front_steering: ["front_left_steering", "front_right_steering"]
rear_steering: ["rear_left_steering", "rear_right_steering"]
wheel_track: 0.55
wheel_base: 0.60
mode: "crab_move" # 可切换: ackermann, in_place_turn, crab_move-
多模式运动解算:提供 4WS 专用运动学插件,支持阿克曼转向、全向横移(蟹行)及原位自旋等模式的无缝切换,兼容标准的控制接口。
-
底层同步逻辑:集成自动化零点校准与多轴协同算法,在底层控制器层面规避了因轮组不同步导致的运动干涉与机械损耗问题。
-
仿真与开发环境:支持 ROS2 Humble,提供完整的开源 URDF 模型与 Gazebo 物理仿真环境,实现算法跨平台迁移。
-
适配优势:原生支持全向矢量运动,简化了复杂运动学的建模过程,使开发者能够直接调用高阶底盘的机动能力。
-
适配短板:相比差速模型,其控制参数与坐标变换更为复杂,对传感器反馈精度及执行器的同步性有更高要求。
四、场景边界界定:差速底盘与四轮四转底盘的适用范围分析
在移动机器人系统设计中,底盘结构的选择本质上是运动自由度、控制复杂度与任务需求之间的平衡问题。差速底盘与四轮四转(4WIDS)底盘并不存在绝对意义上的“先进”与“落后”之分,其核心差异在于适配场景与系统目标不同。
4.1 四轮差速:优先解决“稳定移动”问题
四轮差速底盘的核心特点是运动学模型简单、控制链路稳定,并能够以较低系统复杂度完成大部分移动机器人任务。在 ROS2 生态中,差速模型也是当前适配最成熟的运动结构之一,具备完善的导航、SLAM 与多机器人协同支持。
从运动学角度看,差速底盘本质上属于非完整约束系统(Nonholonomic System),机器人无法直接进行横向移动,其姿态调整主要依赖轮速差形成的滑移转向。因此,这类结构更适用于:
-
户外巡检与长距离移动;
-
野外非结构化环境;
-
多机器人协同系统;
-
大范围地图构建;
-
SLAM 与自主导航验证;
-
对接精度要求相对较低的移动任务。
在上述场景中,机器人通常更关注系统稳定性、环境适应能力以及长期运行可靠性,而不是极限机动能力。差速结构由于机械耦合较少、控制逻辑简单,因此能够降低系统维护成本与运动控制复杂度。
但其局限也较为明显。当机器人需要频繁进行横移、窄空间机动或高精度姿态调整时,差速底盘会受到运动自由度限制。例如在狭窄通道掉头、高精度自主对接以及复杂动态避障场景中,滑移转向容易带来累计误差与轨迹偏移。
4.2 四轮四转:优先解决“高自由度运动控制”问题
四轮四转底盘的核心价值在于提供更高维度的运动自由度。通过四轮独立驱动与独立转向,机器人能够同时控制移动方向与底盘姿态,从而实现传统差速结构难以完成的全向运动能力。
从控制角度看,四轮四转系统通常属于高自由度多驱动耦合系统,其优势不仅体现在“能横移”,更重要的是能够在复杂环境中持续优化机器人姿态、轨迹与轮组状态。因此,这类结构更适用于:
-
窄空间自主导航;
-
高精度轨迹跟踪;
-
全向移动机器人研究;
-
动态障碍物避障;
-
MPC / MPPI 等高阶控制算法;
-
室内复杂物流与自主对接;
-
具身智能移动平台。
相比差速底盘依赖滑移完成转向,四轮四转结构能够在运动过程中减少轮胎滑移与累计误差,并通过连续姿态调整提高轨迹重复精度。这对于室内高精度导航与复杂机动任务尤为重要。
但与此同时,四轮四转系统也意味着更高的运动学复杂度。系统需要同时处理四轮转角同步、速度闭环控制、多模式运动学切换以及底盘状态耦合问题,对控制器设计、参数调优与底层驱动稳定性都有更高要求。
五、科研落地案例
为进一步具象化两种底盘的落地差异,本节结合两大主流开源科研工程,分别对标松灵SCOUT Mini四轮差速底盘与松灵RANGER Mini3.0四轮四转底盘的实际开发场景、算法适配逻辑与工程落地适用边界,所有案例均有公开开源代码与技术文档可溯源,具备极强的参考复用价值。
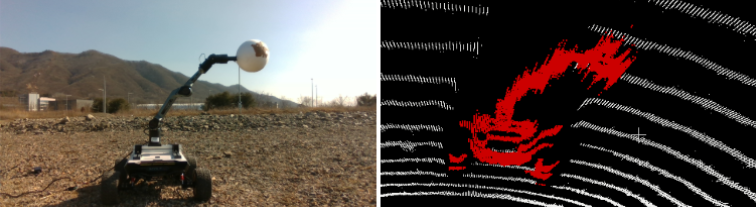
5.1 四轮差速落地案例:松灵SCOUT MINI 野外多机器人标定方案(MARSCalib)
开源项目:MARSCalib: Multi-Agent Robotic Spatial Calibration (IROS 2025)
该项目基于松灵SCOUT MINI四轮差速移动底盘展开开发,重点利用其差速驱动结构与稳定的 ROS2 控制链路,实现野外环境中的多机器人空间外参标定与协同感知任务。相较于复杂全向底盘,四轮差速结构具备更简单的运动学模型与更低的系统耦合复杂度,更适合大范围户外移动机器人场景。
在系统实现中,项目基于标准差速运动模型与 ROS2 diff_drive_controller 完成底盘运动控制,并结合 LiDAR、Camera 与多机器人感知系统,实现复杂环境下的自动化外参标定。研究重点面向野外与地外模拟环境中的传感器污染、目标破损以及地面扰动等问题,系统通过 SAM 图像分割、椭圆提取与分层加权球面拟合等方法,提高复杂环境中的感知鲁棒性与标定稳定性。
依托四轮差速底盘稳定的运动特性,机器人能够在非结构化地形中完成长距离移动、多机器人协同巡检以及大范围环境感知任务。差速结构在野外场景中的优势主要体现在控制逻辑简单、长期运行稳定以及对复杂地形具有较好的适应能力,可有效降低多机器人系统的控制复杂度与部署成本。
5.2 四轮四转落地案例:松灵RANGER MINI 3.0 窄空间MPC导航方案(Nullspace MPC)
开源项目:Nullspace MPC: Model Predictive Control for Omnidirectional Robot
该项目基于 松灵RANGER MINI 3.0 四轮四转移动平台展开开发,重点利用其四轮独立驱动、四轮独立转向(4WIDS)运动学结构,实现全向移动控制与高精度轨迹跟踪。相较于传统差速底盘依赖滑移完成转向,松灵RANGER MINI 3.0 可通过独立控制四个车轮的转角与轮速,实现横向移动、斜向机动、原地零半径旋转以及连续姿态调整等复杂运动能力。
为进一步发挥四轮四转底盘的运动学优势,项目引入Nullspace MPC(模型预测控制)框架,对车轮转角、轮速以及底盘运动状态进行实时联合优化。在窄空间导航与动态障碍物场景中,系统能够生成更平滑、更稳定的运动轨迹,同时兼顾轨迹跟踪精度与底盘姿态控制。
依托四轮四转结构带来的高自由度运动能力,机器人能够完成连续避障、复杂路径绕行以及高精度自主对接等任务,并有效降低传统滑移转向所带来的累计误差与轮胎磨损问题。这类运动控制能力也是传统四轮差速底盘较难实现的典型场景。

5.3 两大底盘工程落地核心取舍逻辑
从两个开源项目的实际落地方式可以看出,移动机器人底盘的选择本质上并不存在“绝对更先进”的统一答案,而是取决于任务场景、运动需求与系统复杂度之间的平衡关系。
对于以野外巡检、多机器人协同、长距离移动以及非结构化环境感知为核心的任务,四轮差速底盘通常更具工程适配性。其运动学模型简单、ROS2 控制生态成熟,对定位、导航与多机器人系统集成更加友好。在大范围户外场景中,差速结构能够以更低的控制复杂度实现稳定运行,同时降低长期部署中的维护成本与系统耦合风险。因此,在 MARSCalib 这类强调鲁棒性与长期稳定运行的项目中,四轮差速结构能够提供更高的工程效率。
相比之下,四轮四转底盘更适用于室内高精度导航、复杂轨迹控制以及全向移动研究等场景。当任务对横向移动、窄空间机动、连续姿态调整或高精度轨迹跟踪提出更高要求时,传统差速结构由于依赖滑移转向,往往会受到累计误差与运动自由度的限制。而四轮四转平台能够通过独立控制车轮转角与轮速,实现更高自由度的底盘运动控制,因此更适合 MPC、最优控制以及复杂自主导航等高阶机器人算法研究。Nullspace MPC 项目正是利用这一运动学优势,实现了复杂环境中的平滑轨迹优化与高精度运动控制。
从工程角度看,四轮差速底盘更强调系统稳定性、部署效率与环境适应能力,而四轮四转底盘则更强调运动自由度、控制精度与复杂机动能力。前者适合大范围户外机器人系统,后者更适合高精度室内移动机器人与先进控制算法验证。
因此,在移动机器人平台选型过程中,更合理的思路通常不是单纯追求“更复杂的运动结构”,而是根据具体任务需求选择与之匹配的运动学方案,在系统复杂度、控制能力与工程成本之间取得平衡。
六、FAQ
Q1:四轮四转性能更强,所有场景都优先选?
A:错误。四轮四转底盘的优势主要体现在运动的灵活性与高精度,在户外开阔场景、低成本科研项目中,其结构与控制冗余会增加运维与硬件成本,性价比远不如标准化四轮差速底盘。场景匹配远优于盲目堆叠高端架构。二者没有绝对优劣,只有场景适配差异。
Q2:四轮差速底盘无法用于室内高精度导航?
A:错误。开阔室内场景(大厅、空旷车间)可稳定使用差速底盘,性价比更高;仅窄通道、高精度对接工况,会暴露差速底盘原理性误差短板,此时四轮四转底盘是唯一优解。
Q3:四轮四转底盘ROS2开发难度极高,不适合落地?
A:以松灵RANGER系列四轮四转底盘为例,底盘已完成底层运动学建模、插件开发、校准工具封装,开发者可快速完成部署,大幅降低高阶底盘落地门槛。
Q4:算法补偿可以彻底消除差速底盘打滑误差?
A:无法彻底消除。
从底层逻辑看,算法修正(如 EKF 滤波、激光雷达匹配等)与物理运动特性之间存在本质区别:
-
算法修正的局限性: 滤波与匹配类算法本质上是局部短时的偏差修正。EKF 仅能平滑传感器的随机噪声,而激光匹配(Scan Matching)则依赖于环境特征的连续性。它们能修正“仪表盘读数”与“实际位移”之间的细微差异,但无法逆转差速转向过程中不可控滑移带来的物理位姿丢失。
-
误差放大效应: 差速底盘的转向属于原理性的开环运动。在高频转向或长距离运行场景下,每一次打滑产生的随机误差都会在下一时刻被当做基准位姿,导致累积误差随作业时间持续放大。这种“滑移残留”具有方向不确定性和非线性特征,仅靠软件补偿难以实现长效的轨迹闭环。
算法仅能优化局部偏差,架构才能决定精度上限。差速底盘适用于环境适应力强、对绝对精度要求适中的场景;而四轮四转则通过物理结构规避了原理性误差,是实现长距离、高频转向下厘米级定位闭环的最优方案。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 6
6 0
0- 0



 已为社区贡献4条内容
已为社区贡献4条内容

所有评论(0)