“好室多模”(GHMMR)·以人工智能与实验科学驱动住房品质提升
好室多模的技术架构解析
解析团队成果"好室多模"(GHMMR)的技术架构与核心实现,涵盖AI参数化设计、简化CFD环境模拟、多模态感知数据融合,以及面向住房领域的物理世界大模型训练框架。提供完整可运行的Python代码,为建筑科技与AI交叉领域的开发者提供技术参考。
关键词:住房大模型、数字孪生、计算性设计、BIM、物理世界大模型、多模态融合
#好室多模#
"好室多模"是依托2025年中国"好房子"国家战略部署,由浙江省一支长期从事建筑科研的青年团队自主发起的一项融合多模态人工智能技术与建筑调控科学的创新性科研范式。
该范式以"安全、舒适、绿色、智慧"的好房子建设要求为政策基准,通过构建"多模态多模型协同调控+物理验证"的双层架构,对住宅建筑的外观设计、结构体系、室内布局、门窗家具及环境性能进行多类型模型(生成模型、评估模型、模拟模型、感知模型等)联合优化与系统验证,并建立多维度的"好房子"检验标准体系。
远期目标是构建基于真实物理世界的多模态住房大模型(Multi-Modal Housing Large Model, MMHLM),通过浙江探索,为中国住房品质提升提供可量化、可验证、可复制的科学调控范式。
网站链接:https://good-housing-multimodel.netlify.app/
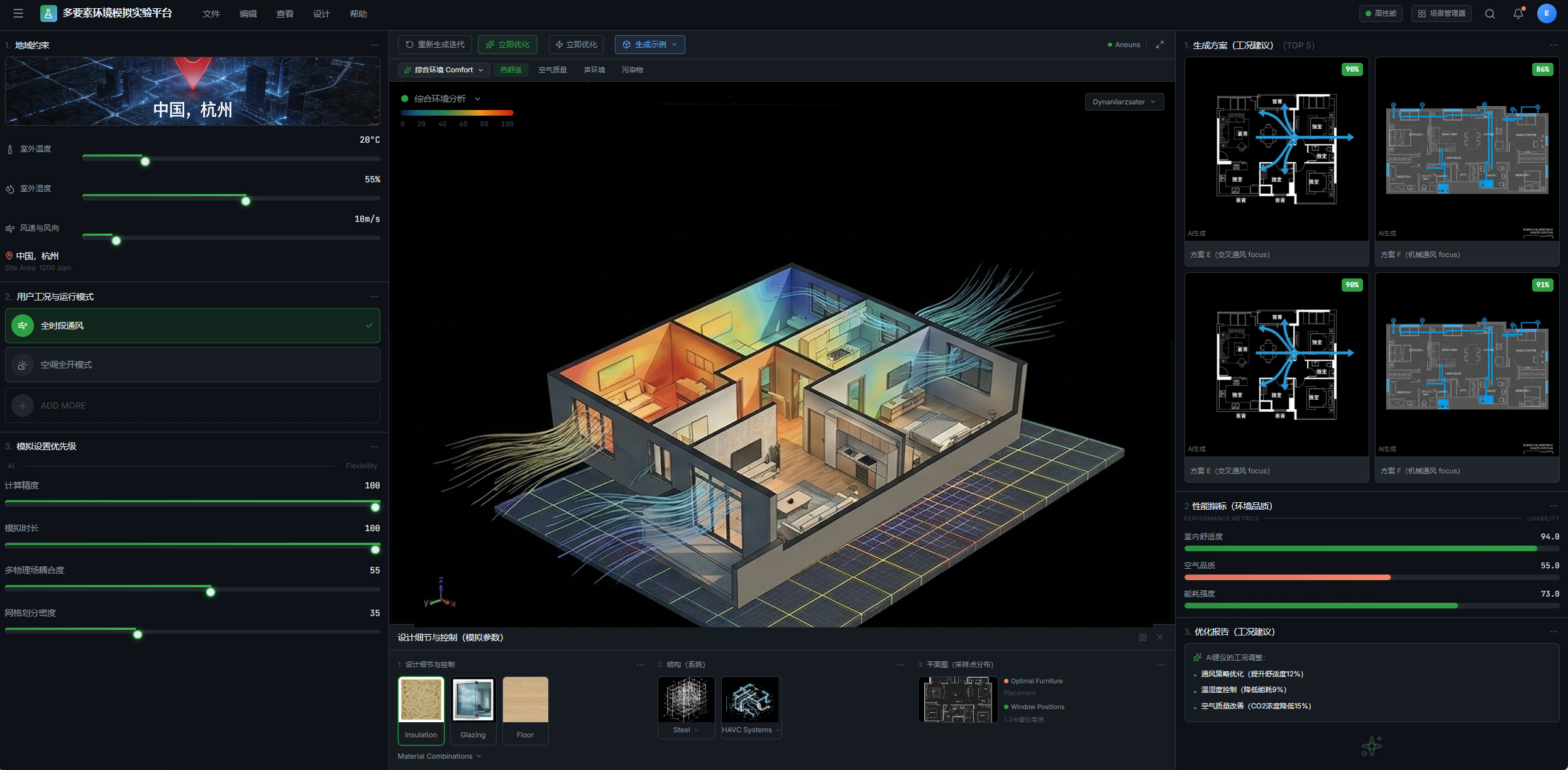
图-“好室多模”·多环境要素实验模拟平台
一、项目背景:从政策语言到技术语言
2025年,"好房子"被首次写入中国政府工作报告,明确住房发展从"有没有"转向"好不好"的战略转型。住房和城乡建设部随后发布《住宅项目规范》(GB 55038-2025),从层高、隔声、采光、适老化等维度提出硬性指标。
从技术视角来看,这意味着住宅设计正在经历从"经验驱动"到"多模型协同驱动"的范式迁移。传统建筑行业长期依赖设计师个人经验与静态规范,缺乏基于真实人居环境多模态数据的动态优化能力。如何将这些政策要求转化为可计算、可验证、可迭代的技术指标,成为摆在建筑科技从业者面前的核心命题。
正是在这一背景下,我们,浙江省一支长期从事建筑科研的青年团队提出了"好室多模"(Multi-Modal Housing Regulation Paradigm, MMHRP)——一项融合多模态人工智能技术与建筑调控科学的系统性科研范式。
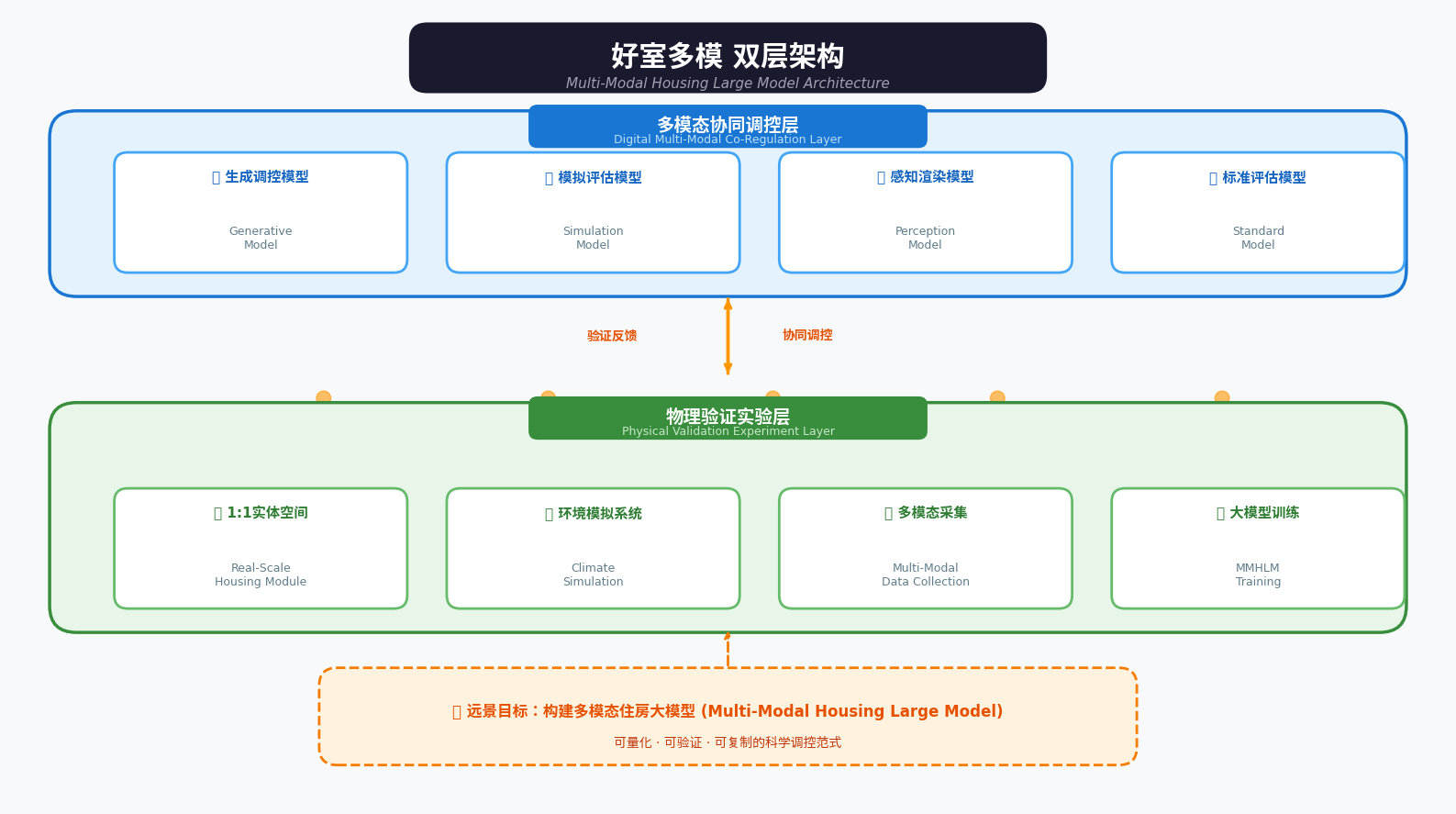
二、核心架构:"四层两域"技术体系
"好室多模"的技术架构可以概括为"双层架构":
表格
| 层级 | 技术定位 | 核心职能 | 核心模型/技术栈 |
|---|---|---|---|
| 多模态协同调控层 | 数字域 | 多模型协同方案生成、性能模拟、高保真渲染、标准评估 | PyTorch, VAE, Rhino/Grasshopper, OpenFOAM |
| 物理验证实验层 | 物理域 | 1:1实体空间、气候/声光环境复现、多模态人体感知数据采集 | OpenFOAM, BACnet, IoT, MQTT, InfluxDB |
两层之间通过双向数据闭环实现"多模态协同调控—物理验证—数据反馈":多模态协同调控层输出的候选方案在物理空间验证,物理实验采集的真实多模态感知数据反哺模型优化。

三、生成调控模型:参数化住宅生成
3.1 技术方案
这是整个范式的"设计引擎"。系统基于变分自编码器(VAE)+ 约束条件嵌入,构建了一套面向住宅建筑的全流程参数化设计管线:
技术亮点:将建筑规范(如《住宅项目规范》GB 55038-2025中的隔声、采光、层高等硬性指标)编码为可微分的约束函数,嵌入生成模型的优化目标中,实现"合规性内嵌"的设计生成。
3.2 核心代码
"""
GHREF-AI 智能调控设计系统 v0.1
基于约束条件的住宅平面参数化生成
"""
import torch
import torch.nn as nn
import numpy as np
from dataclasses import dataclass
from typing import List, Dict
@dataclass
class DesignConstraint:
"""好房子设计约束条件"""
area: float # 建筑面积 (m²)
orientation: float # 朝向角度 (0-360)
climate_zone: str # 气候区
household_type: str # 户型
floor_height: float = 3.0 # 层高, GB 55038-2025要求≥3.0m
class HousingLayoutGenerator(nn.Module):
"""
住宅平面布局生成器
基于VAE + 约束条件嵌入的生成模型
"""
def __init__(self, latent_dim: int = 128, constraint_dim: int = 32):
super().__init__()
self.latent_dim = latent_dim
# 约束条件编码器
self.constraint_encoder = nn.Sequential(
nn.Linear(5, 64),
nn.ReLU(),
nn.Linear(64, constraint_dim)
)
# 解码器: 从隐空间 + 约束条件生成平面布局参数
self.decoder = nn.Sequential(
nn.Linear(latent_dim + constraint_dim, 256),
nn.ReLU(),
nn.Linear(256, 512),
nn.ReLU(),
nn.Linear(512, 128), # 房间边界框参数
)
self.room_types = ['living', 'bedroom', 'kitchen', 'bathroom', 'balcony']
self.room_embed = nn.Embedding(len(self.room_types), 8)
def encode_constraint(self, constraint: DesignConstraint) -> torch.Tensor:
"""将设计约束编码为特征向量"""
climate_map = {'严寒':0, '寒冷':1, '夏热冬冷':2,
'夏热冬暖':3, '温和':4}
climate_idx = climate_map.get(constraint.climate_zone, 2)
climate_onehot = torch.zeros(5)
climate_onehot[climate_idx] = 1.0
features = torch.tensor([
constraint.area / 150.0,
constraint.orientation / 360.0,
constraint.floor_height / 3.0,
])
constraint_vec = torch.cat([features, climate_onehot[:2]])
return self.constraint_encoder(constraint_vec.unsqueeze(0))
def generate(self, constraint: DesignConstraint,
num_samples: int = 5) -> List[Dict]:
"""生成符合约束的住宅平面方案"""
self.eval()
with torch.no_grad():
c = self.encode_constraint(constraint)
layouts = []
for _ in range(num_samples):
z = torch.randn(1, self.latent_dim)
zc = torch.cat([z, c], dim=-1)
params = self.decoder(zc).squeeze()
rooms = []
for i in range(0, 128, 5):
chunk = params[i:i+5]
if i // 5 >= 8:
break
room_type_idx = torch.argmax(chunk[4:]).item()
rooms.append({
'center': (chunk[0].item(), chunk[1].item()),
'size': (abs(chunk[2].item()) * 50,
abs(chunk[3].item()) * 50),
'type': self.room_types[min(room_type_idx, 4)]
})
layouts.append(rooms)
return layouts
def compliance_loss(self, layout: torch.Tensor,
constraint: DesignConstraint) -> torch.Tensor:
"""
好房子规范合规性损失函数
将GB 55038-2025硬性指标编码为可微分约束
"""
loss = torch.tensor(0.0)
# 约束1: 卧室使用面积不应小于9m² (GB 55038-2025 4.1.2)
for room in layout:
if room['type'] == 'bedroom':
area = room['size'][0] * room['size'][1]
loss += torch.relu(9.0 - area) ** 2
# 约束2: 采光系数、隔声性能、热工性能...
return loss3.3 使用示例
# 定义设计任务: 夏热冬冷地区, 三居室, 南向
task = DesignConstraint(
area=120.0,
orientation=180.0, # 正南
climate_zone="夏热冬冷",
household_type="三居",
floor_height=3.0
)
generator = HousingLayoutGenerator()
candidates = generator.generate(task, num_samples=5)
for idx, layout in enumerate(candidates):
print(f"\n方案 {idx+1}:")
for room in layout:
area = room['size'][0] * room['size'][1]
print(f" - {room['type']}: {area:.1f}m²")四、模拟评估模型:简化CFD与采光分析
4.1 技术方案
在多模态协同调控层,系统调用物理场仿真引擎对调控方案进行多维性能预演。考虑到传统CFD(OpenFOAM)单次仿真耗时数小时,"好室多模"采用"简化CFD + ML代理模型"的双轨策略:
| 模拟维度 | 快速评估方法 | 高精度方法 | 输出指标 |
|---|---|---|---|
| 通风性能 | 简化NS方程 + 代理模型 | OpenFOAM CFD | 风速、换气次数 |
| 光环境 | Daylight Factor经验公式 | Radiance/DIALux | 采光系数、照度 |
| 热环境 | EnergyPlus简化模型 | EnergyPlus详细模型 | 冷热负荷 |
| 声环境 | 统计能量分析(SEA) | COMSOL声学 | 隔声量、背景噪声 |
代理模型基于高保真CFD仿真结果训练,可在毫秒级给出性能预测,仅在关键方案上调用完整CFD验证。
4.2 核心代码
"""
GHREF-Env 多要素环境模拟引擎 v0.1
基于简化CFD的住宅风环境/采光快速评估
"""
import numpy as np
import torch
import torch.nn as nn
from typing import Dict, Tuple, Optional
class MicroClimateSimulator:
"""住宅微气候快速模拟器"""
def __init__(self, grid_size: Tuple[int, int, int] = (64, 64, 16)):
self.nx, self.ny, self.nz = grid_size
self.dx = 0.5 # 网格分辨率 0.5m
# 物理场初始化
self.velocity = np.zeros((3, self.nx, self.ny, self.nz))
self.temperature = np.ones((self.nx, self.ny, self.nz)) * 20.0
self.pressure = np.zeros((self.nx, self.ny, self.nz))
def set_boundary_conditions(self,
wind_speed: float = 3.0,
wind_dir: float = 0.0,
temp_outdoor: float = 35.0,
building_mask: Optional[np.ndarray] = None):
"""设置计算域边界条件"""
self.building_mask = building_mask if building_mask is not None \
else np.zeros((self.nx, self.ny, self.nz))
# 对数风剖面 U(z) = (u*/k) * ln(z/z0)
kappa = 0.41
z0 = 0.5
u_star = wind_speed * kappa / np.log(10 / z0)
for z in range(self.nz):
height = z * self.dx + 0.5
if height > z0:
u_profile = (u_star / kappa) * np.log(height / z0)
self.velocity[0, 0, :, z] = u_profile * np.cos(np.radians(wind_dir))
self.velocity[1, 0, :, z] = u_profile * np.sin(np.radians(wind_dir))
self.temp_outdoor = temp_outdoor
def solve_navier_stokes_simplified(self, iterations: int = 100):
"""
求解简化Navier-Stokes方程 (稳态不可压缩)
连续性方程: ∇·u = 0
动量方程: (u·∇)u = -(1/ρ)∇p + ν∇²u
"""
nu = 1.5e-5 # 运动粘度
rho = 1.225 # 密度
u, v, w = self.velocity[0], self.velocity[1], self.velocity[2]
p = self.pressure
mask = self.building_mask
for _ in range(iterations):
u_old, v_old = u.copy(), v.copy()
for i in range(1, self.nx-1):
for j in range(1, self.ny-1):
for k in range(1, self.nz-1):
if mask[i, j, k]:
continue
# 对流项 (迎风格式)
conv_u = (u_old[i,j,k] * (u_old[i,j,k] - u_old[i-1,j,k])
+ v_old[i,j,k] * (u_old[i,j,k] - u_old[i,j-1,k])) / self.dx
# 扩散项 (中心差分)
diff_u = nu * (
(u_old[i+1,j,k] - 2*u_old[i,j,k] + u_old[i-1,j,k])
+ (u_old[i,j+1,k] - 2*u_old[i,j,k] + u_old[i,j-1,k])
) / self.dx**2
# 压力梯度
grad_p = (p[i+1,j,k] - p[i-1,j,k]) / (2 * self.dx * rho)
u[i,j,k] = u_old[i,j,k] + (-conv_u + diff_u - grad_p) * 0.01
# 压力修正
div_u = np.zeros_like(p)
for i in range(1, self.nx-1):
for j in range(1, self.ny-1):
for k in range(1, self.nz-1):
if mask[i,j,k]:
continue
div_u[i,j,k] = ((u[i+1,j,k] - u[i-1,j,k])
+ (v[i,j+1,k] - v[i,j-1,k])) / (2 * self.dx)
p -= div_u * 0.5 * rho
self.velocity = np.stack([u, v, w])
self.pressure = p
def daylighting_analysis(self, room_centers: list,
room_areas: list,
sky_condition: str = "overcast") -> Dict:
"""
采光系数快速计算 (Daylight Factor方法)
DF = (Ein / Eout) × 100%
GB 55038-2025 要求: 卧室/起居室采光系数≥1%
"""
results = {}
L_z = 8000 if sky_condition == "overcast" else 12000
for idx, (center, area) in enumerate(zip(room_centers, room_areas)):
cx, cy, cz = [int(c/self.dx) for c in center]
cx = np.clip(cx, 1, self.nx-2)
cy = np.clip(cy, 1, self.ny-2)
cz = np.clip(cz, 1, self.nz-2)
# 寻找最近外部流体单元
min_dist = float('inf')
for di in range(-10, 11):
for dj in range(-10, 11):
ni, nj = cx+di, cy+dj
if 0 <= ni < self.nx and 0 <= nj < self.ny:
if not self.building_mask[ni, nj, cz]:
dist = np.sqrt(di**2 + dj**2) * self.dx
min_dist = min(min_dist, dist)
# 简化采光模型
df = min(10.0, 0.1 * (1.0 / (1 + min_dist**2 * 0.1)) * 0.5 * 0.2 * 100)
results[f"room_{idx}"] = {
"daylight_factor_%": round(df, 2),
"compliance": df >= 1.0, # GB 55038-2025
"illuminance_lux": round(df / 100 * L_z * 0.5, 1)
}
return results
class MLProxyModel(nn.Module):
"""
环境性能代理模型 (Surrogate Model)
替代耗时CFD计算, 实现毫秒级性能预测
"""
def __init__(self, input_dim: int = 20, output_dim: int = 5):
super().__init__()
self.mlp = nn.Sequential(
nn.Linear(input_dim, 128), nn.ReLU(), nn.BatchNorm1d(128),
nn.Linear(128, 256), nn.ReLU(), nn.Dropout(0.1),
nn.Linear(256, 128), nn.ReLU(),
nn.Linear(128, output_dim) # [通风, 采光, 能耗, 热舒适, 声环境]
)
def forward(self, design_params: torch.Tensor) -> torch.Tensor:
return self.mlp(design_params)五、物理验证实验层:多模态感知采集与融合
5.1 技术方案
实验人员进入1:1物理空间时,携带多模态感应设备,采集四类数据:
| 模态 | 设备 | 采集频率 | 核心指标 |
|---|---|---|---|
| 环境参数 | 环境传感器 | 1Hz | 温湿度、PM2.5、CO2、照度 |
| 生理信号 | 生理监测手环 | 250Hz | 心率、皮电、血氧 |
| 行为轨迹 | 眼动仪 | 120Hz | 注视点、瞳孔直径、固视时长 |
| 热舒适 | 热舒适传感衣 | 10Hz | 8点皮温、热流密度 |
| 主观感受 | 移动端量表 | 事件触发 | 热投票、舒适度、空气质量 |
技术核心在于多模态时序对齐与融合推理。不同传感器的采样率差异巨大(1Hz vs 250Hz),需要统一的时间戳同步机制与重采样策略。
5.2 核心代码
"""
GHREF-Data 多模态感知数据采集与融合系统 v0.1
"""
import torch
import torch.nn as nn
import numpy as np
from dataclasses import dataclass
from typing import Dict, List, Tuple
from collections import deque
@dataclass
class SensorReading:
timestamp: float
sensor_id: str
modality: str
data: np.ndarray
position: Tuple[float, float, float]
class MultiModalDataCollector:
"""多模态传感器数据统一采集器"""
MODALITY_CONFIG = {
"env_sensor": {"sample_rate": 1,
"channels": ["temp", "humidity", "pm25", "co2", "illumination"]},
"eye_tracker": {"sample_rate": 120,
"channels": ["gaze_x", "gaze_y", "pupil_diameter", "fixation"]},
"physiological": {"sample_rate": 250,
"channels": ["hr", "eda", "temp_skin", "spo2"]},
"thermal_clothing": {"sample_rate": 10,
"channels": ["t_skin_8points", "heat_flux"]},
}
def __init__(self, buffer_size: int = 10000):
self.buffer = deque(maxlen=buffer_size)
self.active_sensors = set()
self.sync_offset = {}
def register_sensor(self, sensor_id: str, modality: str,
sync_timestamp: float):
"""注册传感器并校准时间同步"""
self.active_sensors.add(sensor_id)
self.sync_offset[sensor_id] = sync_timestamp
def ingest(self, sensor_id: str, modality: str,
raw_data: np.ndarray, position: Tuple[float, float, float]):
"""摄入单帧传感器数据"""
corrected_time = np.datetime64('now').astype(float) - \
self.sync_offset.get(sensor_id, 0)
reading = SensorReading(
timestamp=corrected_time,
sensor_id=sensor_id,
modality=modality,
data=raw_data,
position=position
)
self.buffer.append(reading)
return reading
class MultiModalFusionNet(nn.Module):
"""
多模态融合网络
将环境参数、生理信号、行为数据融合为统一的居住体验表征
参考: Multi-Transformer Encoders + Cross-Attention Fusion
"""
def __init__(self,
env_dim: int = 5,
physio_dim: int = 4,
eye_dim: int = 4,
thermal_dim: int = 9,
embed_dim: int = 64,
num_heads: int = 4):
super().__init__()
# 各模态独立编码器
self.env_encoder = nn.Sequential(
nn.Linear(env_dim, 32), nn.ReLU(), nn.Linear(32, embed_dim)
)
self.physio_encoder = nn.Sequential(
nn.Linear(physio_dim, 32), nn.ReLU(), nn.Linear(32, embed_dim)
)
self.eye_encoder = nn.Sequential(
nn.Linear(eye_dim, 32), nn.ReLU(), nn.Linear(32, embed_dim)
)
self.thermal_encoder = nn.Sequential(
nn.Linear(thermal_dim, 32), nn.ReLU(), nn.Linear(32, embed_dim)
)
# 跨模态注意力融合
self.cross_attention = nn.MultiheadAttention(
embed_dim=embed_dim, num_heads=num_heads, batch_first=True
)
# 输出头: [热舒适, 空气质量感受, 整体满意度]
self.comfort_predictor = nn.Sequential(
nn.Linear(embed_dim * 4, 128), nn.ReLU(), nn.Dropout(0.2),
nn.Linear(128, 3)
)
def forward(self, env_seq: torch.Tensor, physio_seq: torch.Tensor,
eye_seq: torch.Tensor, thermal_seq: torch.Tensor) -> torch.Tensor:
"""
Args:
env_seq: [B, T, 5] 环境时序
physio_seq: [B, T, 4] 生理时序
eye_seq: [B, T, 4] 眼动时序
thermal_seq: [B, T, 9] 热舒适时序
Returns:
[B, 3] 三维舒适度预测
"""
# 时序编码: 取时间维度均值
env_e = self.env_encoder(env_seq).mean(dim=1)
physio_e = self.physio_encoder(physio_seq).mean(dim=1)
eye_e = self.eye_encoder(eye_seq).mean(dim=1)
thermal_e = self.thermal_encoder(thermal_seq).mean(dim=1)
# 拼接融合
fused = torch.cat([env_e, physio_e, eye_e, thermal_e], dim=-1)
comfort = self.comfort_predictor(fused)
return comfort六、多模态住房大模型:MMHLM 训练框架
6.1 技术方案
这是"好室多模"最具技术野心的部分。MMHLM(Multi-Modal Housing Large Model)需要具备以下技术特征:
与通用LLM不同,MMHLM在标准Transformer层中嵌入了物理知识适配器(Physical Knowledge Adapter, PKA),将建筑科学先验(如Fourier热传导定律、Archimedes浮力驱动的通风效应等)编码为可学习的规则嵌入,同时融合多模态感知数据(环境、生理、视觉、语义)进行统一表征学习。
6.2 核心代码
"""
GHREF-LLM 住房大模型训练框架 v0.1
Real-World Housing Large Model (RWH-LM)
"""
import torch
import torch.nn as nn
import torch.nn.functional as F
from typing import Dict, Optional
class HousingConfig:
"""住房大模型配置"""
vocab_size = 32000
hidden_size = 1024
num_layers = 24
num_heads = 16
intermediate_size = 4096
max_position_embeddings = 8192
env_input_dim = 5
layout_input_dim = 128
dropout = 0.1
class PhysicalKnowledgeAdapter(nn.Module):
"""
物理知识适配器 (PKA)
将建筑物理规律编码为模型可理解的先验知识
"""
def __init__(self, hidden_size: int, num_physics_rules: int = 10):
super().__init__()
self.physics_embeds = nn.Embedding(num_physics_rules, hidden_size)
self.rule_attention = nn.Sequential(
nn.Linear(hidden_size, num_physics_rules), nn.Softmax(dim=-1)
)
# 物理规则库
self.rule_descriptions = {
0: "heat_conduction", # Q = -k·A·dT/dx
1: "natural_ventilation", # stack effect & wind pressure
2: "daylighting", # DF = (Ein/Eout) × 100%
3: "sound_isolation", # TL = 20·log(m·f) - 47.2
4: "energy_balance", # Q_gain - Q_loss = mcΔT
5: "thermal_comfort", # PMV-PPD模型
6: "air_quality", # CADR = 2V·ACH
7: "humidity_control", # 结露点计算
8: "structural_load", # F = k·Δx
9: "fire_dynamics", # t²增长模型
}
def forward(self, hidden_states: torch.Tensor,
env_conditions: torch.Tensor) -> torch.Tensor:
"""注入物理知识到隐状态"""
rule_weights = self.rule_attention(env_conditions)
physics_knowledge = torch.matmul(rule_weights, self.physics_embeds.weight)
physics_knowledge = physics_knowledge.unsqueeze(1).expand(
-1, hidden_states.size(1), -1
)
# 残差注入
enhanced = hidden_states + 0.1 * physics_knowledge
return enhanced
class HousingTransformerLayer(nn.Module):
"""住房专用Transformer层 (含物理知识适配)"""
def __init__(self, config: HousingConfig):
super().__init__()
self.norm1 = nn.LayerNorm(config.hidden_size)
self.attn = nn.MultiheadAttention(config.hidden_size, config.num_heads,
batch_first=True)
self.norm2 = nn.LayerNorm(config.hidden_size)
self.mlp = nn.Sequential(
nn.Linear(config.hidden_size, config.intermediate_size),
nn.GELU(), nn.Linear(config.intermediate_size, config.hidden_size),
nn.Dropout(config.dropout)
)
self.physics_adapter = PhysicalKnowledgeAdapter(config.hidden_size)
def forward(self, x: torch.Tensor, env_conditions: torch.Tensor):
# Self-Attention
x = x + self.attn(self.norm1(x), self.norm1(x), self.norm1(x))[0]
# 物理知识注入
x = self.physics_adapter(x, env_conditions)
# FFN
x = x + self.mlp(self.norm2(x))
return x
class HousingLargeModel(nn.Module):
"""
Real-World Housing Large Model (RWH-LM)
面向住房领域的物理世界大模型
架构特点:
1. 物理知识增强的Transformer
2. 多模态输入: 文本 + 环境参数 + 布局参数
3. 多任务输出: 文本生成 + 舒适度预测 + 能耗预测
4. 物理一致性约束
"""
def __init__(self, config: HousingConfig):
super().__init__()
self.config = config
# 嵌入层
self.token_embed = nn.Embedding(config.vocab_size, config.hidden_size)
self.pos_embed = nn.Embedding(config.max_position_embeddings,
config.hidden_size)
# 多模态适配器
self.env_adapter = nn.Sequential(
nn.Linear(config.env_input_dim, 256), nn.ReLU(),
nn.Linear(256, config.hidden_size)
)
self.layout_adapter = nn.Sequential(
nn.Linear(config.layout_input_dim, 256), nn.ReLU(),
nn.Linear(256, config.hidden_size)
)
# Transformer堆叠
self.layers = nn.ModuleList([
HousingTransformerLayer(config) for _ in range(config.num_layers)
])
self.final_ln = nn.LayerNorm(config.hidden_size)
# 多任务输出头
self.lm_head = nn.Linear(config.hidden_size, config.vocab_size, bias=False)
self.comfort_head = nn.Linear(config.hidden_size, 3)
self.energy_head = nn.Linear(config.hidden_size, 1)
def forward(self, input_ids: torch.Tensor, env_params: torch.Tensor,
layout_params: Optional[torch.Tensor] = None) -> Dict[str, torch.Tensor]:
"""
Args:
input_ids: [B, L] 文本token
env_params: [B, 5] 环境参数 [温度, 湿度, 风速, 照度, CO2]
layout_params: [B, 128] 布局参数 (可选)
Returns:
dict: {logits, comfort_pred, energy_pred, physics_loss}
"""
B, L = input_ids.shape
# 文本嵌入
tok_emb = self.token_embed(input_ids)
pos_ids = torch.arange(L, device=input_ids.device).unsqueeze(0).expand(B, -1)
x = tok_emb + self.pos_embed(pos_ids)
# 多模态条件注入 (前缀token)
env_emb = self.env_adapter(env_params).unsqueeze(1)
prefix = [env_emb]
if layout_params is not None:
prefix.append(self.layout_adapter(layout_params).unsqueeze(1))
x = torch.cat(prefix + [x], dim=1)
# Transformer前向
for layer in self.layers:
x = layer(x, env_params)
x = self.final_ln(x)
text_features = x[:, -L:, :]
pooled = x.mean(dim=1)
# 多任务输出
logits = self.lm_head(text_features)
comfort = self.comfort_head(pooled)
energy = self.energy_head(pooled)
# 物理一致性损失
physics_loss = self._physics_loss(env_params, energy)
return {
"logits": logits,
"comfort_pred": comfort,
"energy_pred": energy,
"physics_loss": physics_loss
}
def _physics_loss(self, env_params: torch.Tensor,
energy_pred: torch.Tensor) -> torch.Tensor:
"""物理一致性约束: 温差越大 → 能耗越高"""
indoor_temp = 26.0
outdoor_temp = env_params[:, 0]
temp_diff = torch.abs(indoor_temp - outdoor_temp)
expected_energy = temp_diff * 2.0
return F.mse_loss(energy_pred.squeeze(), expected_energy)
def train_rwh_lm(config: HousingConfig = HousingConfig()):
"""RWH-LM训练入口"""
device = torch.device("cuda" if torch.cuda.is_available() else "cpu")
model = HousingLargeModel(config).to(device)
total_params = sum(p.numel() for p in model.parameters())
print(f"RWH-LM 总参数量: {total_params/1e6:.2f}M")
optimizer = torch.optim.AdamW(model.parameters(), lr=2e-4, weight_decay=0.01)
# 模拟训练batch
batch = {
"input_ids": torch.randint(0, config.vocab_size, (4, 512)).to(device),
"env_params": torch.randn(4, 5).to(device),
}
model.train()
for step in range(100):
optimizer.zero_grad()
outputs = model(**batch)
dummy_labels = torch.randint(0, config.vocab_size, (4, 512)).to(device)
lm_loss = F.cross_entropy(outputs["logits"].view(-1, config.vocab_size),
dummy_labels.view(-1))
total_loss = lm_loss + 0.1 * outputs["physics_loss"]
total_loss.backward()
optimizer.step()
if step % 20 == 0:
print(f"Step {step}: total={total_loss.item():.4f}, "
f"lm={lm_loss.item():.4f}, "
f"physics={outputs['physics_loss'].item():.4f}")6.3 模型规模与训练策略
RWH-LM 规格参数:
├── 总参数量: ~1.2B (24层 × 16头 × 1024维)
├── 物理规则库: 10条核心建筑物理规律
├── 多模态输入: 文本 + 环境5维 + 布局128维
├── 多任务输出: LM + 舒适度回归 + 能耗回归
├── 物理一致性: 温差-能耗约束等可微分物理损失
└── 训练数据: 虚拟CFD数据(大规模) + 物理实验数据(小规模, 高保真)
训练策略:
├── Stage 1: 虚拟实验数据预训练 (自监督)
├── Stage 2: 物理实验数据微调 (监督学习)
├── Stage 3: 人类反馈强化学习 (RLHF, 主观舒适度对齐)
└── Stage 4: 物理一致性校准 (约束优化)七、技术路线图
|
|---|
八、项目信息
| 项目 | 内容 |
|---|---|
| 中文名 | 好室多模 |
| 外文名 | Multi-Modal Housing Regulation Paradigm(MMHRP) |
| 提出时间 | 2026年 |
| 提出地点 | 中国·浙江省 |
| 所属领域 | 建筑科学、多模态人工智能、住房政策、实验建筑 |
| 核心特征 | 多模态多模型协同调控、物理验证、Benchmark标准体系 |
| 发起主体 | 浙江省内一支从事建筑科研的青年团队 |
| 政策依据 | "好房子"建设国家部署等 |
| 技术基础 | 多模态AI、BIM、计算性设计、数字孪生、物理环境模拟 |
| 远期目标 | 构建基于真实物理世界的多模态住房大模型(MMHLM) |
九、结语
"好室多模"本质上是一次用多模态技术语言重新翻译住房需求的尝试。当政策层面的"安全、舒适、绿色、智慧"被转化为可计算的指标、可模拟的性能、可训练的跨模态模型时,住房品质的提升便从模糊的经验判断走向了精确的科学调控。
对技术从业者而言,建筑行业是一个尚待开发的巨大应用场景。从BIM数据治理到物理场仿真,从多模态感知到跨模态领域大模型,"好室多模"所涉及的技术栈几乎涵盖了当前AI与工程交叉领域的前沿方向。期待更多开发者关注并参与到这一领域的建设中来。
相关链接
https://good-housing-multimodel.netlify.app/
参考与延伸阅读
-
"好房子"建设国家部署(2025年政府工作报告)
-
《住宅项目规范》GB 55038-2025
-
Fanger, P.O. Thermal Comfort: Analysis and Applications in Environmental Engineering (1970)
相关概念索引:
-
好房子:2025年政府工作报告提出的住房发展目标,核心特质为安全、舒适、绿色、智慧
-
数字孪生建筑:通过数字化手段对物理建筑进行全生命周期映射的技术体系
-
计算性设计:运用算法与数据驱动建筑设计过程的方法论
-
物理世界大模型:基于真实物理环境数据训练、具备物理规律理解与预测能力的人工智能大模型

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 14
14 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)