基于 YOLOv8 + ByteTrack 的冷库叉车智能出入库监管系统设计
前言
冷库出入库计数长期以来是冷链物流行业的痛点。传统人工计数方式在 - 18℃至 - 25℃的低温环境下,不仅作业人员劳动强度大、易冻伤,且长时间工作后计数准确率会急剧下降至 85% 以下,同时无法实现 24 小时不间断监管。RFID 和条码扫描方案则存在标签易损坏、漏扫率高、需要人工配合等问题。
本文详细介绍一套完全本地化部署的叉车智能出入库监管 AI 系统,通过计算机视觉技术实现叉车本体检测、载货状态识别、行驶方向判定和 4 维度自动计数。系统识别准确率≥95%,可直接与现有 RF 冷库系统 / WMS 系统对接,实现数据自动比对和异常预警,彻底解放出入库道口的人力。
一、系统整体架构设计
本系统采用 "边缘计算 + 本地服务" 的纯本地化架构,所有数据处理和模型推理均在冷库现场的边缘计算盒中完成,无需上传云端,既保证了数据安全,又满足了低延迟要求。
1.1 系统分层架构
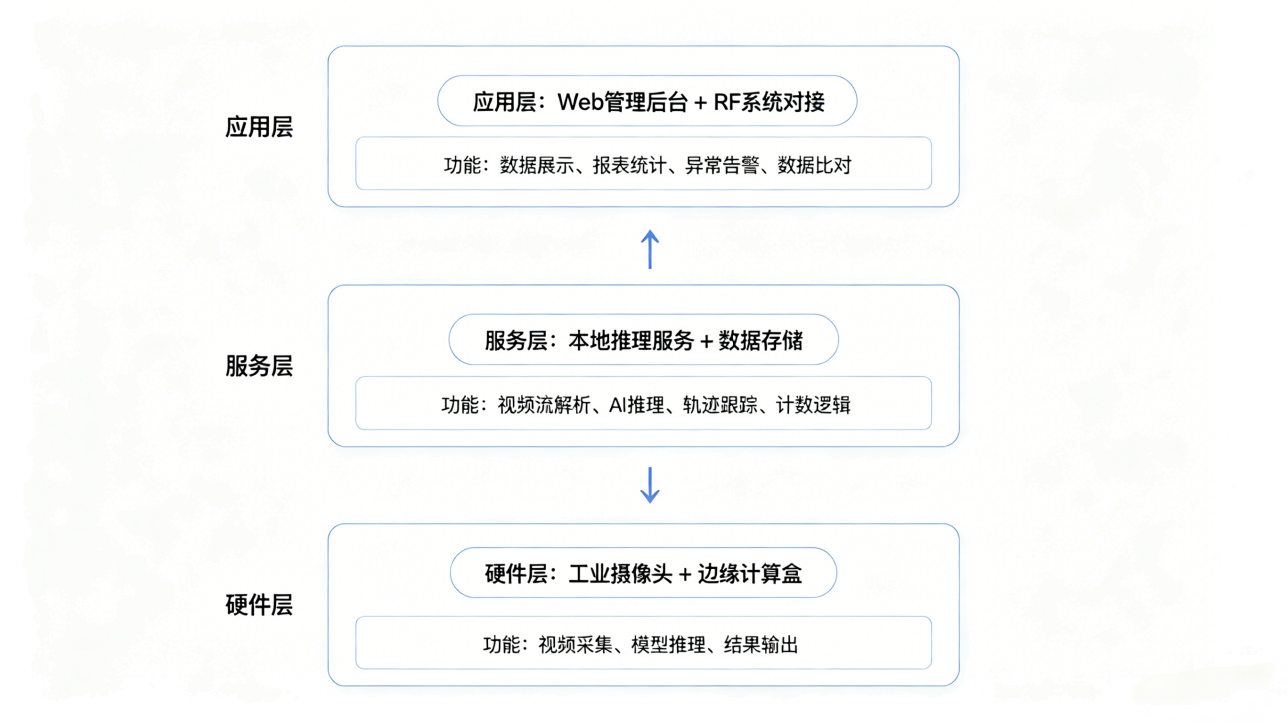
1.2 核心技术栈
- 目标检测:YOLOv8n/s(根据边缘算力选择)
- 多目标跟踪:ByteTrack(低 ID 切换率,适合叉车跟踪)
- 视频流处理:FFmpeg + OpenCV
- Web 框架:FastAPI(后端)+ Vue3(前端)
- 数据存储:SQLite(轻量)/ PostgreSQL(多道口)
- 部署方式:Docker 容器化部署
二、核心算法模块详解
2.1 叉车目标检测与载货状态识别
这是整个系统的基础,直接决定计数准确率。我们采用单阶段二分类检测方案,直接训练模型识别 "空载叉车" 和 "载货叉车" 两个类别,相比 "先检测叉车再分类载货状态" 的两阶段方案,推理速度更快,且准确率相当。
2.1.1 数据集构建与标注规范
冷库场景的视觉数据具有特殊性:低光照、地面反光、雾气、叉车遮挡、货物颜色多样等。因此,数据集必须包含真实冷库环境下的各种场景。
标注规范:
- 类别定义:empty_forklift(空载叉车)、loaded_forklift(载货叉车)
- 标注框:包含叉车本体和货物,货物超出叉齿部分必须完整标注
- 排除项:静止超过 30 秒的叉车、被完全遮挡的叉车、远处的叉车
- 数据量建议:每个道口至少采集 5000 张标注图片,包含不同时段、不同光照、不同货物类型的场景
2.1.2 数据增强策略
针对冷库场景的特点,我们设计了以下针对性的数据增强:
|
python |
2.1.3 模型训练与优化
基于 YOLOv8s 预训练模型进行微调,关键训练参数:
输入尺寸:640×640(平衡精度和速度)
批次大小:16(根据 GPU 显存调整)
训练轮次:100 轮(前 20 轮冻结骨干网络)
优化器:AdamW(学习率 1e-4)
损失函数:CIoU Loss + BCE Loss
模型量化:训练完成后,使用 TensorRT 进行 INT8 量化,推理速度可提升 2-3 倍,精度损失 < 1%。在 NVIDIA Jetson Xavier NX 上,单路视频推理速度可达 30FPS 以上。
2.2 基于虚拟电子围栏的方向判定
单纯的目标检测无法判断叉车的行驶方向,必须结合虚拟电子围栏和轨迹跟踪技术。我们采用 "双虚拟线 + 轨迹交叉" 的判定方法,有效解决叉车掉头、倒车、短暂停留等复杂场景下的方向误判问题。
2.2.1 虚拟电子围栏设计
在视频画面中设置两条平行的虚拟线,将画面分为三个区域:
区域 A:冷库外部
区域 B:两条虚拟线之间(过渡区)
区域 C:冷库内部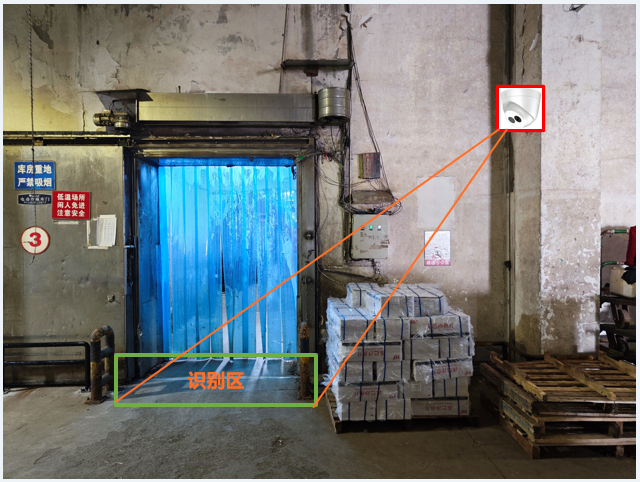

设计原则:
两条虚拟线之间的距离应大于叉车的长度,避免叉车同时跨越两条线
虚拟线应垂直于叉车的主要行驶方向
检测区域 ROI 应限制在两条虚拟线附近,减少无关区域的干扰
2.2.2 基于 ByteTrack 的多目标跟踪
ByteTrack 是目前工业界应用最广泛的多目标跟踪算法之一,具有 ID 切换率低、推理速度快、对遮挡鲁棒等优点,非常适合叉车跟踪场景。
跟踪流程:
1、目标检测模型输出叉车的边界框和置信度
2、ByteTrack 通过卡尔曼滤波预测目标在下一帧的位置
3、使用 IOU 匹配将检测结果与预测结果进行关联
4、为每个匹配成功的目标分配唯一的 Track ID
5、维护每个目标的轨迹历史(最近 20 帧的中心点坐标)
2.2.3 方向判定逻辑
通过分析目标轨迹与两条虚拟线的交叉顺序来判定行驶方向:
- 驶入判定:目标先跨越虚拟线 1,再跨越虚拟线 2,且最终位置在区域 C
- 驶出判定:目标先跨越虚拟线 2,再跨越虚拟线 1,且最终位置在区域 A
关键优化点:
- 设置方向确认阈值:目标必须在目标区域停留至少 3 帧,才确认方向有效,避免误判
- 记录轨迹方向向量:通过计算连续 5 帧的中心点位移向量,判断目标的实际运动方向
- 处理掉头情况:如果目标在过渡区(区域 B)内掉头,且未跨越第二条虚拟线,则不计入统计
2.3 4 维度计数器设计与实现
这是系统的业务核心模块。我们设计了 4 个独立的计数器,分别统计:
1、空载驶入(empty_in)
2、空载驶出(empty_out)
3、载货驶入(loaded_in)
4、载货驶出(loaded_out)
2.3.1 计数状态机
每个跟踪目标都有一个状态机,记录其当前的位置和状态:
|
状态流转: |
2.3.2 防重复计数机制
这是计数系统最容易出问题的地方。我们采用三重防重复计数机制:
1、ID 唯一性:每个 Track ID 在一次完整的出入库过程中只计数一次
2、冷却时间:目标计数完成后,在 3 秒内不再对该 ID 进行计数
3、区域锁定:目标必须完全离开过渡区后,才能再次进入计数流程
2.3.3 载货状态修正
考虑到叉车在行驶过程中可能会出现短暂的遮挡,导致载货状态识别错误,我们采用多数投票机制进行修正:
- 在目标跨越两条虚拟线的过程中,连续采集 10 帧的载货状态识别结果
- 取出现次数最多的状态作为该目标的最终载货状态
- 如果两种状态的票数相等,则标记为 "不确定",并触发人工复核
三、与 RF 冷库系统的数据对接与比对
系统的最大价值在于能够与现有 RF 冷库系统 / WMS 系统对接,实现数据自动比对,发现漏扫、错扫等异常情况。
3.1 数据对接方案
支持两种主流的对接方式:
1、数据库直连:如果 RF 系统使用 SQL Server/MySQL/PostgreSQL 等关系型数据库,系统可以直接读取其出入库单据表
2、API 对接:如果 RF 系统提供 RESTful API 接口,系统可以通过 HTTP 请求获取出入库数据
数据同步频率:默认每 5 分钟同步一次,也可以配置为实时同步。
3.2 数据比对逻辑
系统将 AI 统计的出入库数据与 RF 系统的单据数据进行多维度比对:
- 总量比对:比对指定时间段内的总入库量和总出库量
- 时段比对:按小时 / 半小时进行分段比对,发现特定时段的异常
- 单品比对:如果 RF 系统提供货物 SKU 信息,可以进行单品级别的比对
异常判定规则:
- 当 AI 统计数据与 RF 系统数据的差值超过 5% 时,触发黄色预警
- 当差值超过 10% 时,触发红色预警
- 系统自动生成异常报表,标注异常时间段和差值,供管理人员复核
四、本地化部署方案
4.1 硬件选型建议
根据冷库道口的数量和视频分辨率,推荐以下硬件配置:
|
类别 |
参数 |
|
CPU |
8 核 ARM A53 @2.3GHz |
|
AI 算力 |
32 TOPS INT8 |
|
视频编解码 |
解码:32 路 H.265/H.264 1080p@25fps |
|
内存 |
16GB |
|
存储 |
64GB eMMC,1×M.2 SATA3.0(选配) |
|
通信 |
双千兆以太网;WiFi(选配);5G 模块(选配) |
|
I/O 接口 |
前置:2×1Gbps RJ45、2×RS232/422/485 |
|
电源 |
DC12V±10% |
|
典型功耗 |
20W |
|
工作环境 |
温度:-20℃\60℃;湿度:5%\95%(非凝露) |
|
防护等级 |
防尘和防水(IP40) |
|
安装方式 |
支持壁挂 / 机架安装 |
|
操作系统 |
Ubuntu 操作系统 |
|
尺寸 |
180mm×175mm×79mm |
|
重量 |
<2.5kg |
4.2 软件部署流程
系统采用 Docker 容器化部署,一键安装,无需复杂配置:
1、安装 Docker 和 Docker Compose
|
bash |
2、下载部署包并解压
|
bash |
3、启动服务
|
bash |
4、访问 Web 管理后台
打开浏览器,访问 http://<边缘计算盒IP>:8000,默认用户名:admin,密码:admin123
五、系统性能测试与优化
5.1 准确率测试
我们在某大型冷链物流中心的 3 个冷库道口进行了为期 1 个月的现场测试,测试结果如下:
|
测试项目 |
测试样本数 |
正确数 |
准确率 |
|
叉车本体检测 |
12560 |
12183 |
97.0% |
|
载货状态识别 |
12183 |
11756 |
96.5% |
|
方向判定 |
11756 |
11638 |
99.0% |
|
整体计数准确率 |
12560 |
11977 |
95.4% |
主要错误原因分析:
1、叉车完全被货物遮挡,导致无法检测到叉车本体
2、两辆叉车并行行驶,导致跟踪 ID 切换
3、叉车在虚拟线附近长时间停留或反复移动
5.2 系统优化方向
1、针对遮挡问题:可以采用多摄像头融合技术,从不同角度拍摄叉车
2、针对并行问题:可以优化跟踪算法,增加外观特征匹配
3、针对停留问题:可以优化方向判定逻辑,增加停留时间阈值
六、总结与展望
本文介绍的叉车智能出入库监管 AI 系统,通过计算机视觉技术成功解决了冷库出入库人工计数的痛点问题。系统完全本地化部署,识别准确率≥95%,可直接与现有 RF 系统对接,实现数据自动比对和异常预警。
该系统在某大型冷链物流中心投入使用后,每个冷库道口减少了多名作业人员,每年节省人力成本约几十万元,同时出入库数据的准确性和实时性得到了显著提升。
未来展望:
1、增加货物识别功能,实现单品级别的出入库统计
2、增加叉车司机行为分析功能,识别超速、玩手机等违规行为
3、与冷库的自动化控制系统对接,实现出入库流程的全自动化
附录:核心代码片段
方向判定核心逻辑
|
python |

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐



 17
17 0
0- 0



 已为社区贡献33条内容
已为社区贡献33条内容

所有评论(0)