OpenCode/Hermes画工业机器人CAD(含安装和演示):用 text-to-cad 把自然语言变成工程图纸
项目速览
earthtojake/text-to-cad 是一个开源的 AI Agent 技能集合,专注于将自然语言转化为工程级 CAD 模型与机器人设计文件,而非仅生成视觉 3D 预览。
GitHub 数据(截至 2026-05-28):约 5k Star、584 Fork,MIT 协议,JavaScript 主语言。
定位:为 Codex、Claude Code、Gemini CLI、OpenClaw 等编码 Agent 提供硬件工程技能包。
官网 / 演示:文档 cadskills.xyz;在线演示 demo.cadskills.xyz。Skills CLI 工具详情见 skills.sh。
核心能力
1. 文本生成工程化 CAD
输入自然语言(如 "100×60×20mm 矩形块,四角 M6 通孔,顶部倒角 2mm"),AI 生成可执行的 build123d Python 代码,而非网格模型。
-
代码驱动设计:可回溯、可编辑、可参数化调整,符合工业设计流程。
2. 多格式工业导出
支持 STEP / STL / 3MF / DXF / GLB / URDF / SRDF / SDF 等,直接用于 3D 打印、仿真、机器人开发。
3. CAD Explorer(可视化浏览器)
-
预览模型、检查几何 / 拓扑、测量尺寸、查看装配关系。
-
支持
@cad[...]几何引用,便于 Agent 精准迭代修改。
4. 标准件库集成
可从 step.parts catalog 直接调用现成标准件(螺栓、轴承、电子元件等),避免重复建模。
5. 本地化运行
无后端依赖,本地执行、数据安全,支持离线工作流。
技术原理
核心架构:LLM → build123d 代码 → OpenCASCADE 内核 → 工程文件。
|
层级 |
组件 |
说明 |
|---|---|---|
|
LLM 层 |
Claude / Gemini / Codex |
理解文本并生成参数化 CAD 代码 |
|
建模层 |
build123d(Python) |
基于 OpenCASCADE 构建参数化、可编辑的 B-Rep 模型 |
|
导出层 |
统一输出 |
保留完整设计意图与参数,输出 STEP 等工业格式 |
核心优势:生成的是设计程序而非图像,支持版本控制、参数迭代、工程验证。
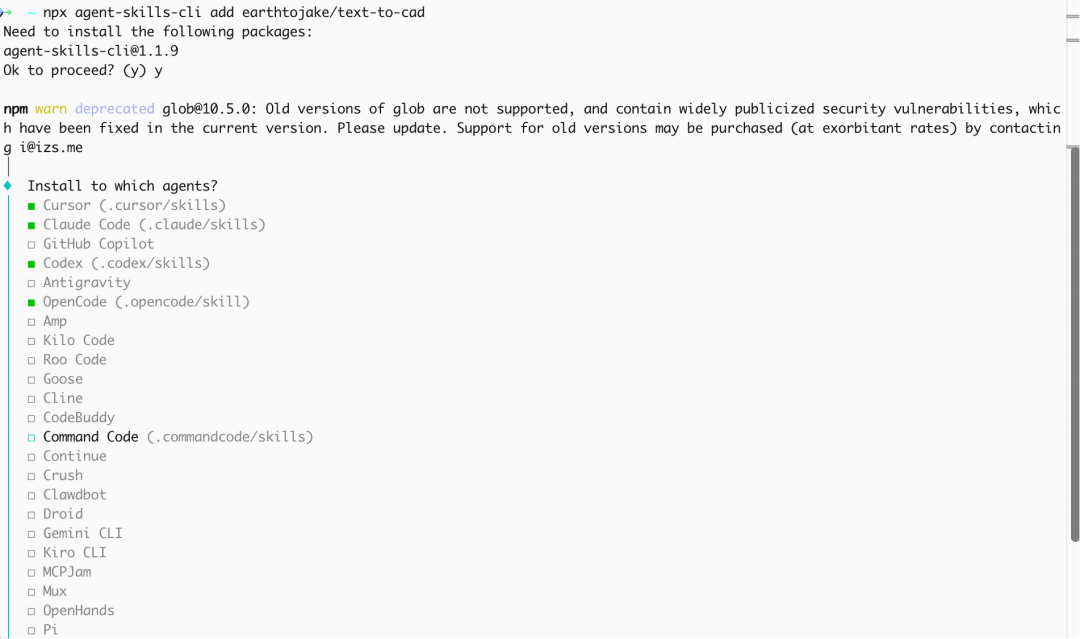
安装text-to-cad(Codex/OpenCode等)
执行npx agent-skills-cli add earthtojake/text-to-cad

上下箭头再按空格选择,目前暂时不直接支持Hermes,但可以通过软链接映射给Hermes
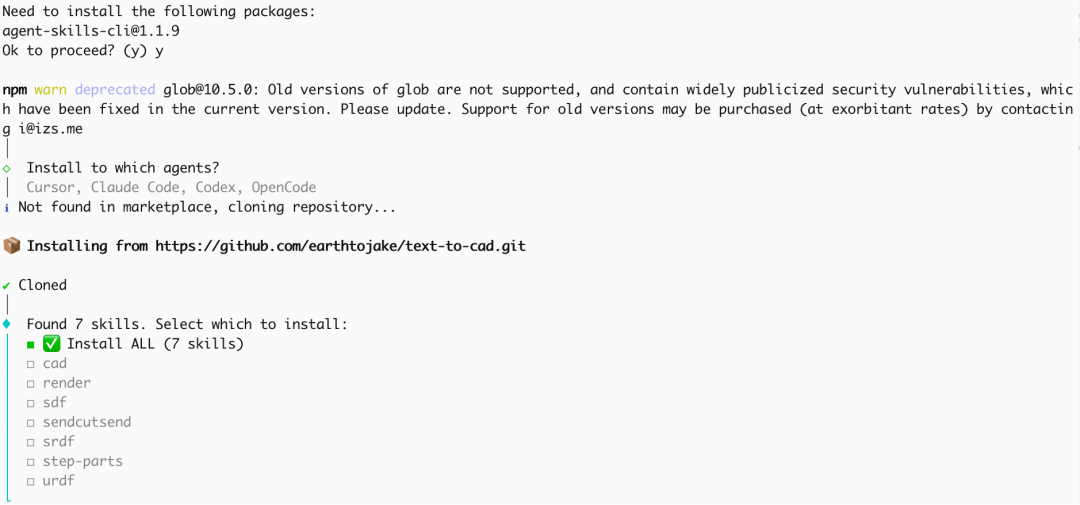
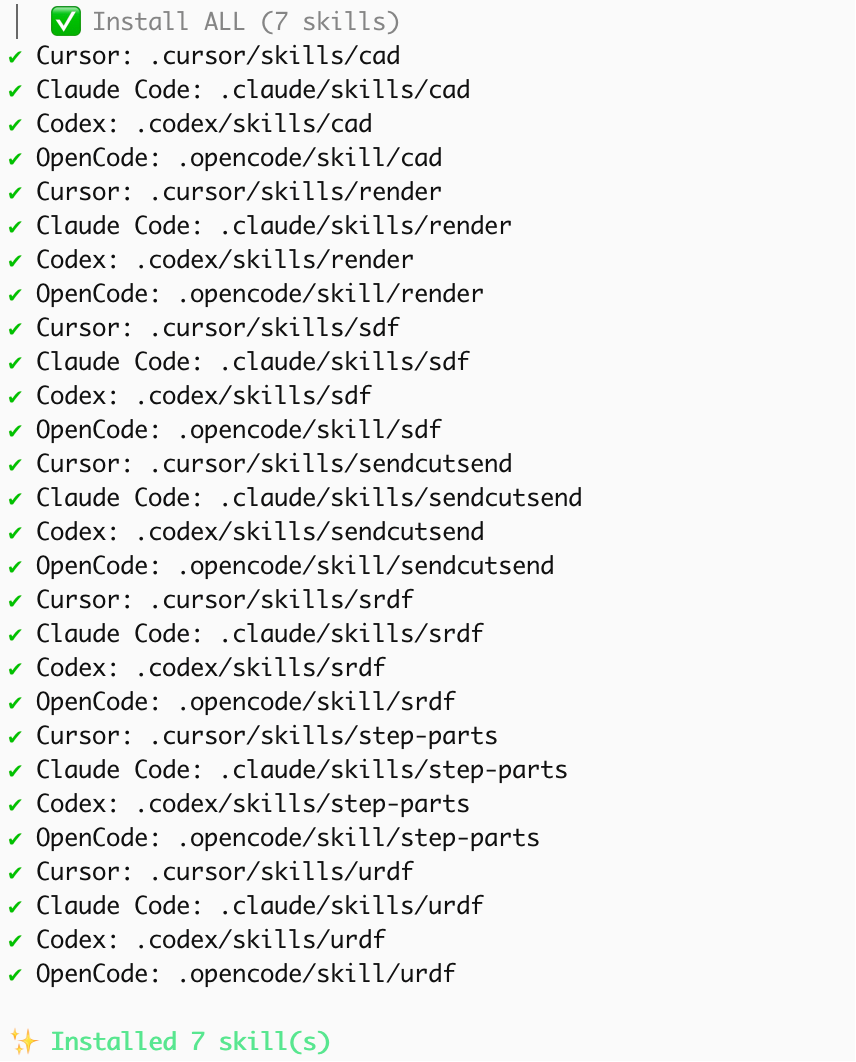
接下来会自动克隆项目,然后选择skills安装,同样上下箭头配合空格键进行选择,默认直接回车选全部
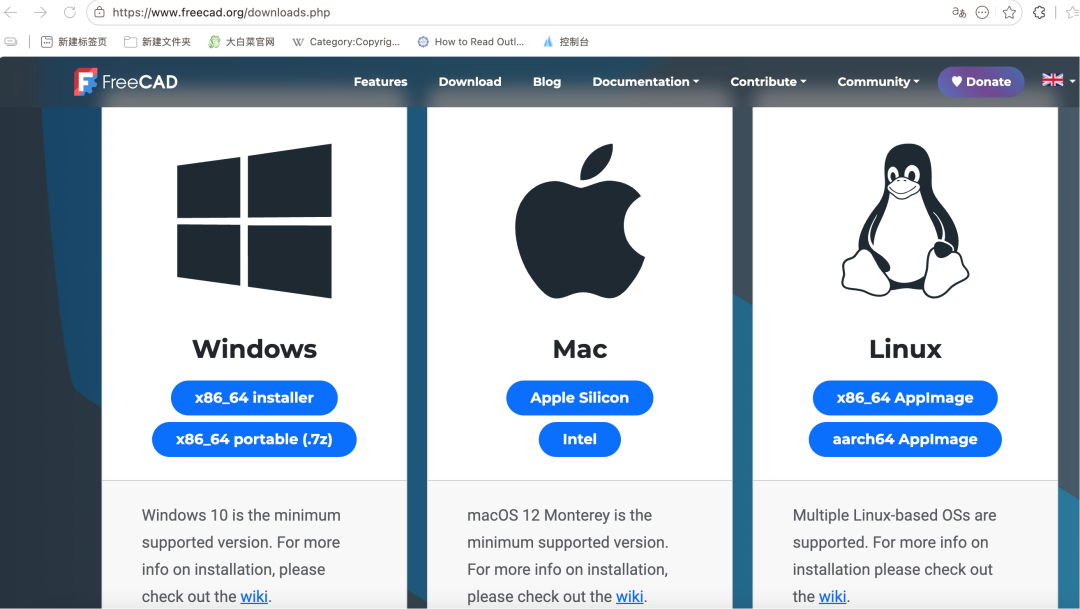
安装FreeCAD
打开https://www.freecad.org/downloads.php,根据系统选择对应版本下载
下载后进行安装并打开,language可以设置为中文
Opencode画CAD
用opencode测试画cad图,可以看到ai在读cad的skill文件
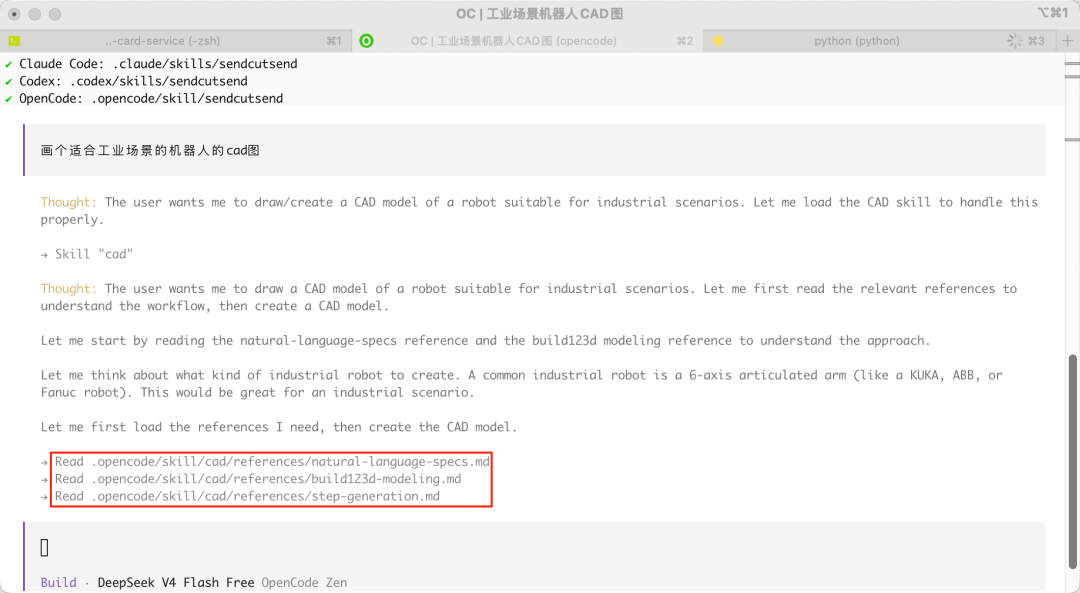
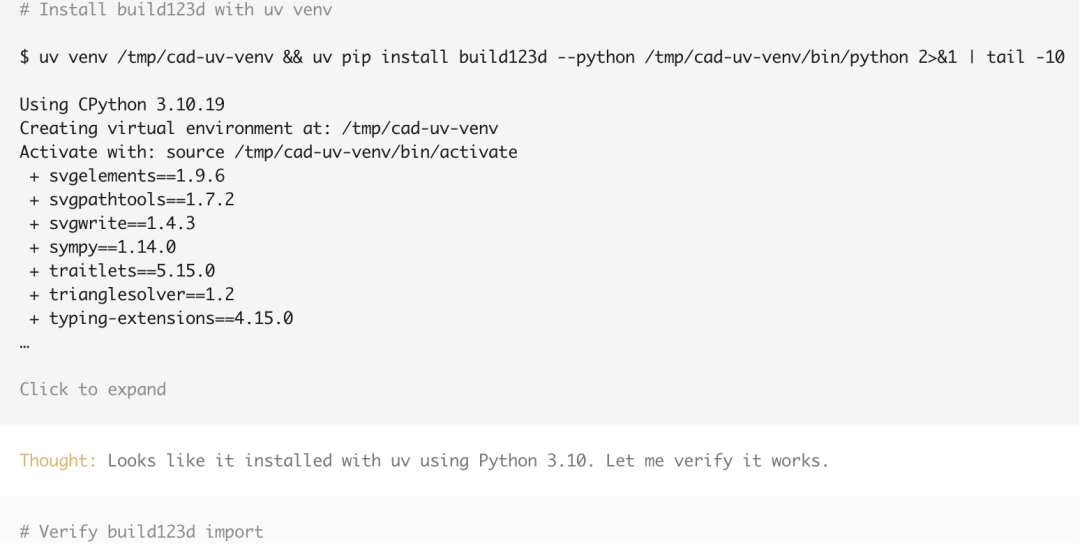
ai自动创建虚拟环境和安装cad的python框架build123d
AI编写六轴机械臂的代码

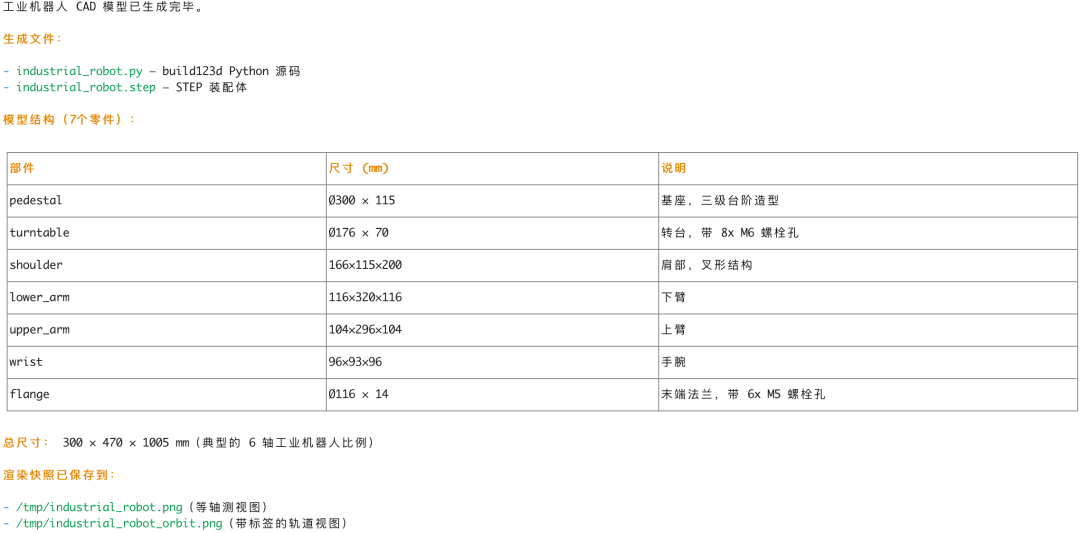
生成cad文件并验证
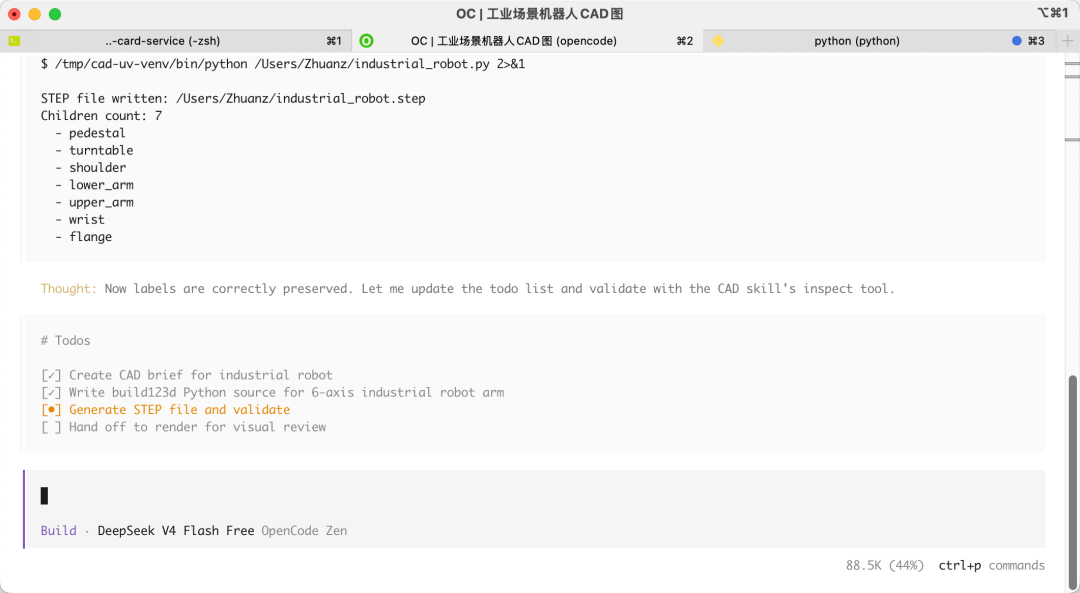
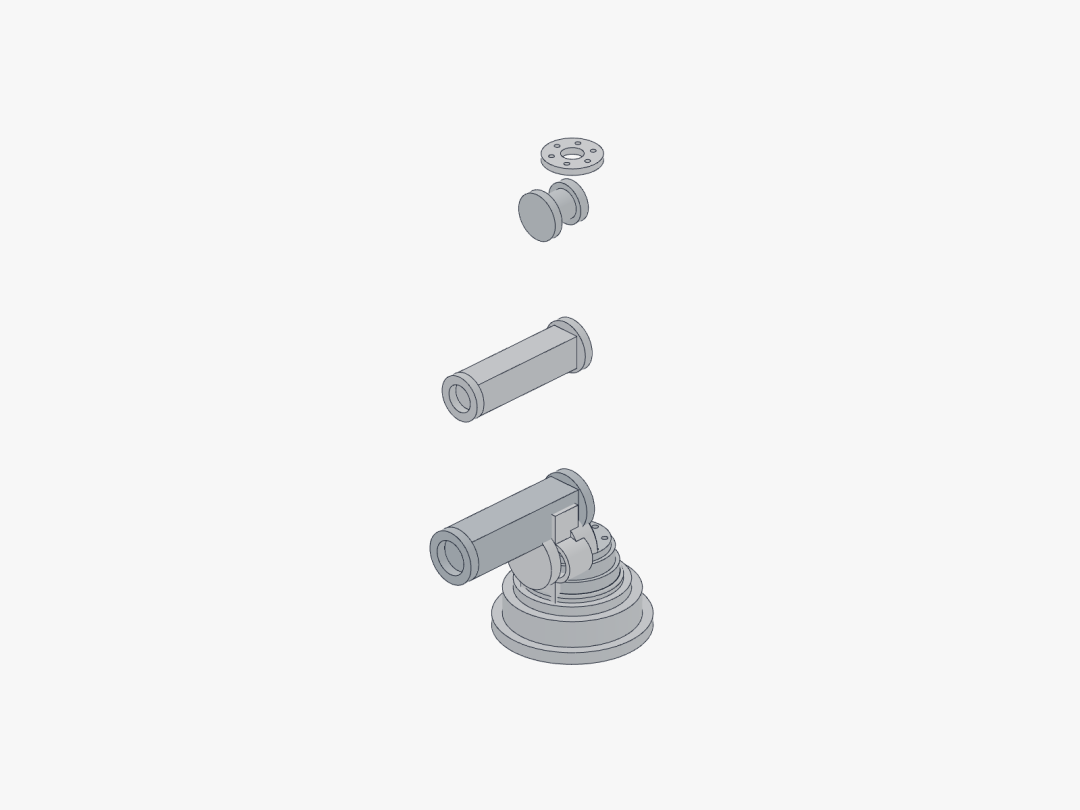
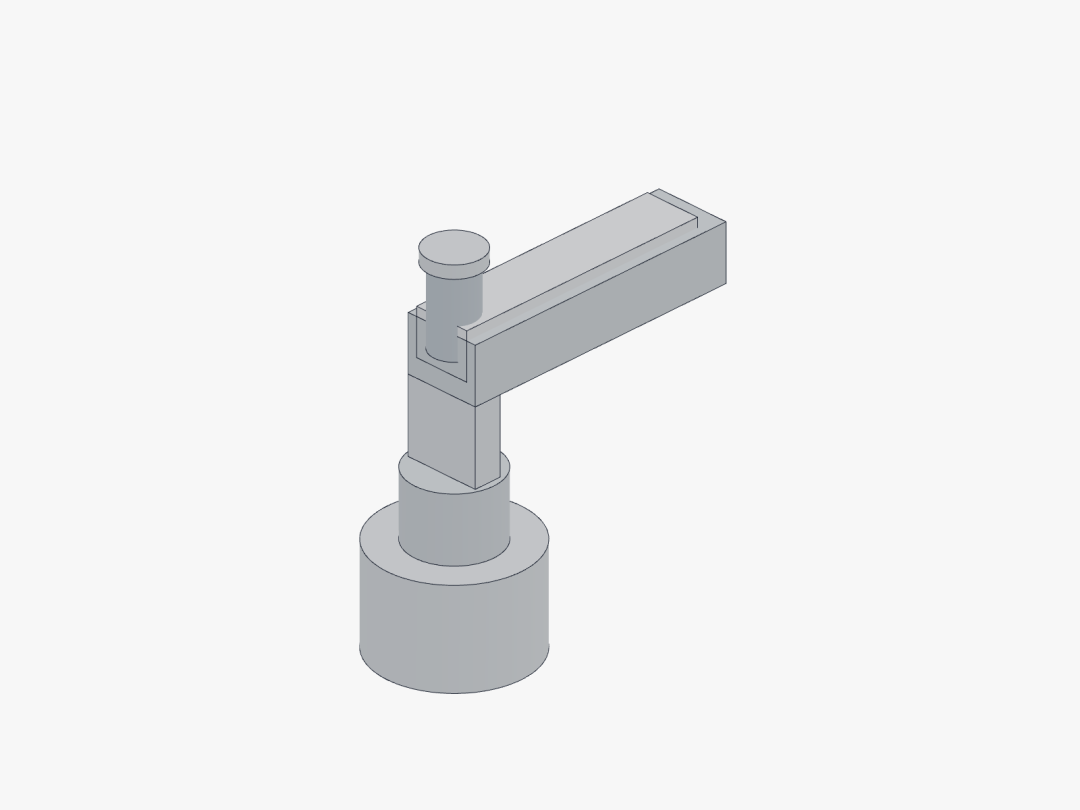
生成图像
等轴测视图来看并没有画出机器人,至少需要连接机械臂
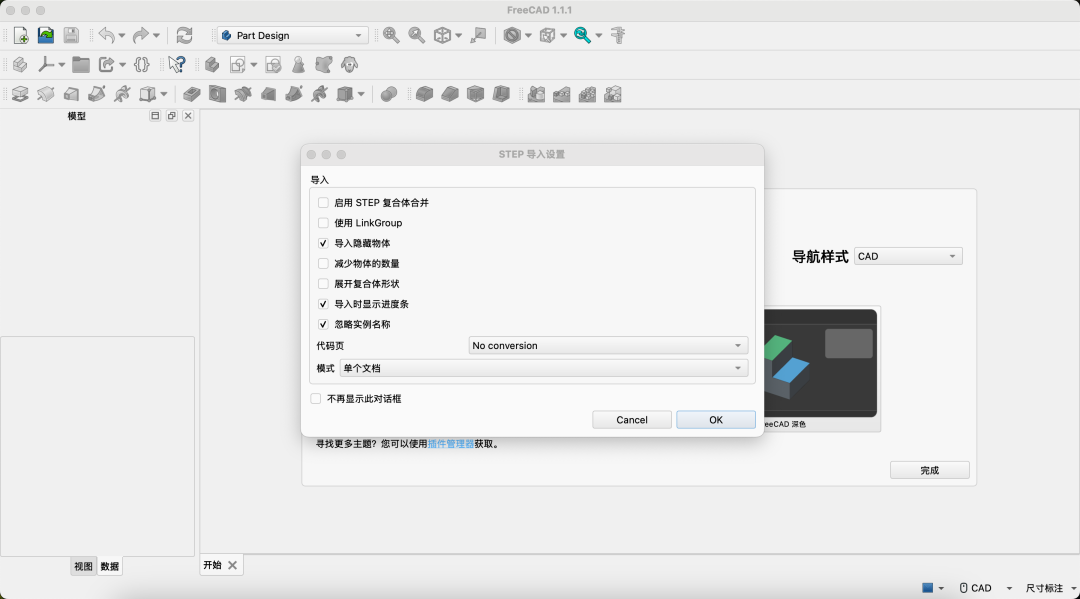
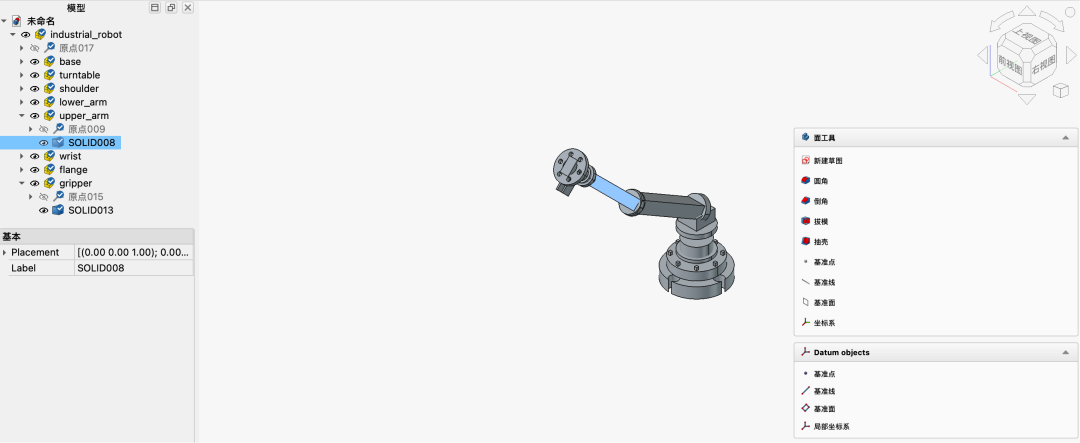
在freeCAD点击左上角第二个图标,选择cad文件,点击open打开
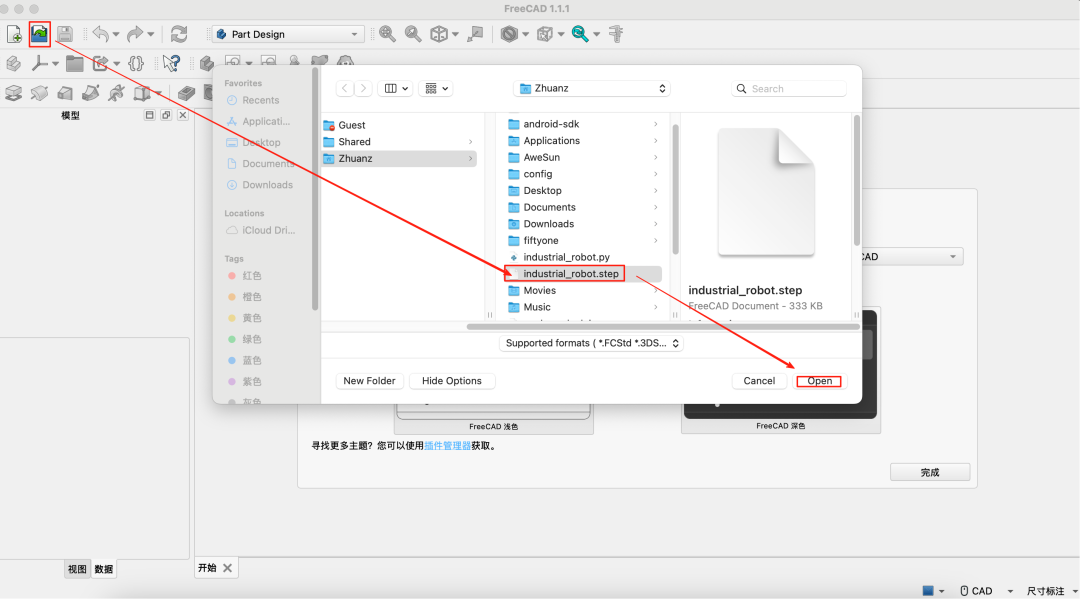
默认方式导入,点击ok
查看,默认是看上视图,点击组件会显示名称和坐标信息,点击上视图四个箭头可以看其他视图
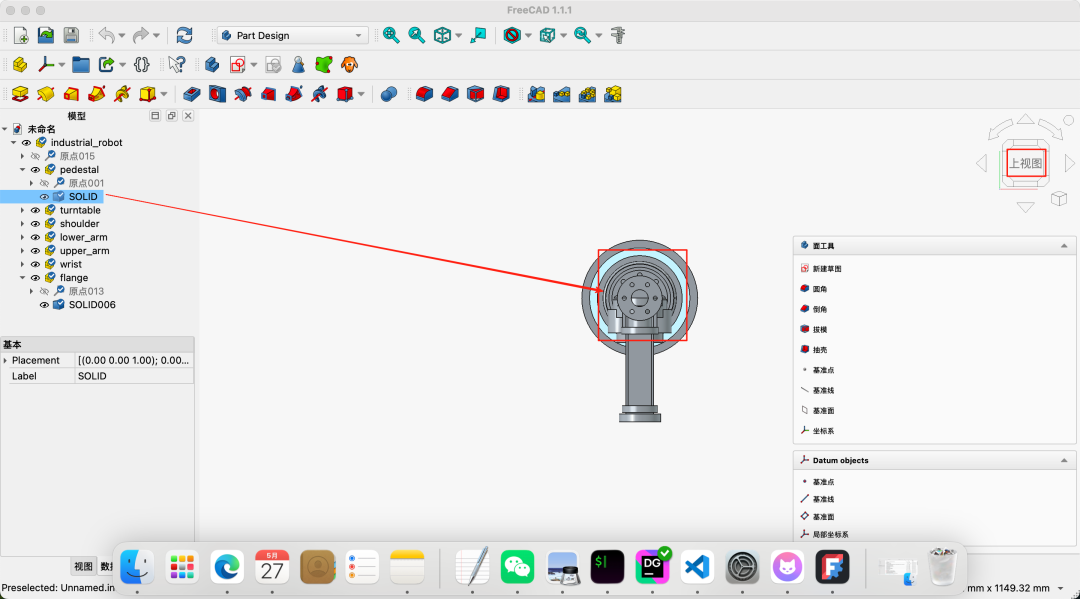
整体来看离预期有较大差别,更换为具有视觉能力的多模态模型修改,比如Kimi-K2.6和MiMo-V2.5等

MiMO-V2.5修改了一会的结果
看起来与预期仍有较大差距
调整提示词,继续要求修改,中间改了好几次,还得提醒检查坐标计算,而不是盲目大幅度修改
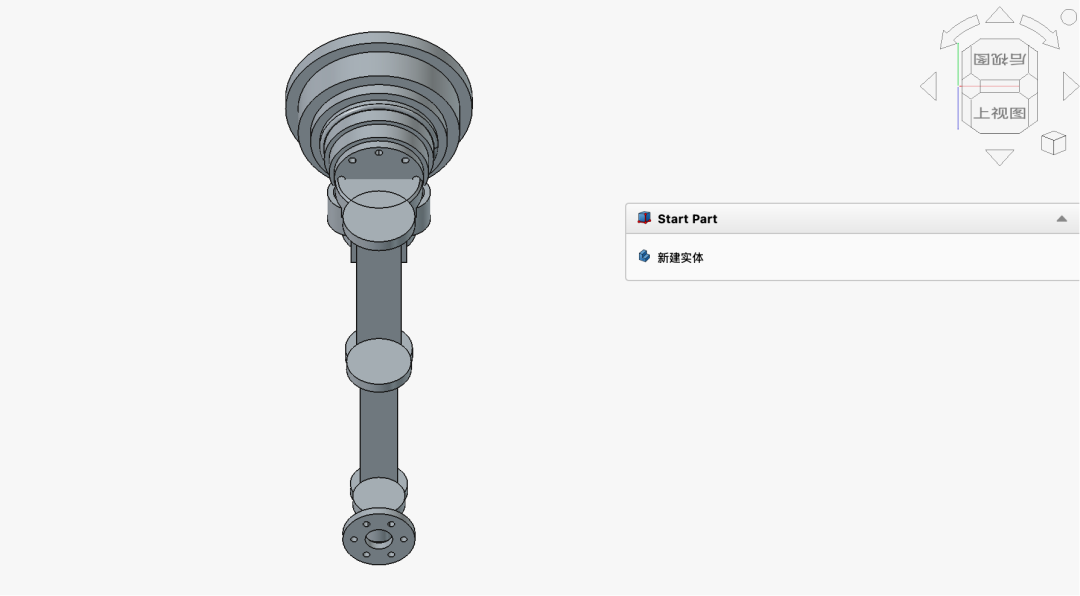
这是修改过程中比较接近的机械臂
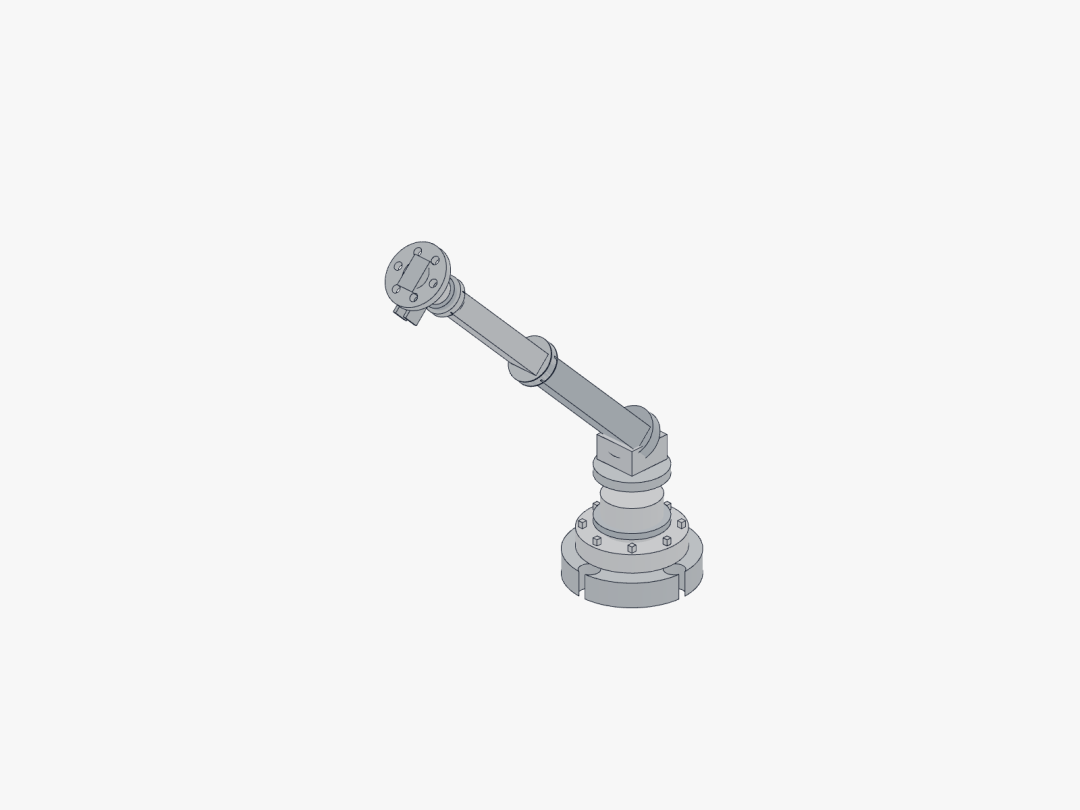
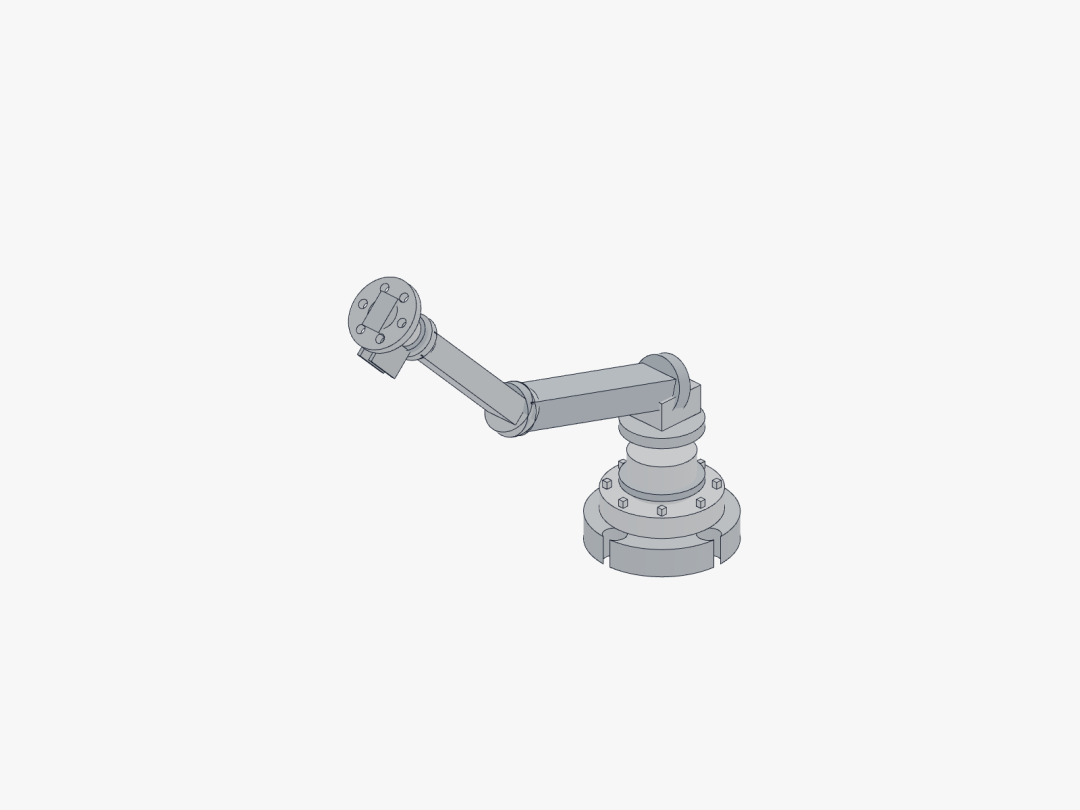
下面是改了几个小时最终结果,看起来终于令人满意,但仍有不足,比如转其他方向看可以发现仍有本应该连接的地方存在缝隙
安装text-to-cad(Hermes)
如果要给Hermes,可以复制到刚才安装cad相关的skills复制到Hermes的skills文件夹。但为了方便管理skills,节省空间,采用软链接的方法,把~/.opencode/skills的移动到~/.agents/skills
再把~/.codex/skills和~/.opencode/skills关于关于cad的skills删除
执行以下命令进行软链接映射(Mac和linux适用)
skills=("cad" "render" "sdf" "sendcutsend" "srdf" "step-parts" "urdf")
for skill in "${skills[@]}"; do
ln -s ~/.agents/skills/"$skill" ~/.hermes/skills/"$skill"
ln -s ~/.agents/skills/"$skill" ~/.codex/skills/"$skill"
done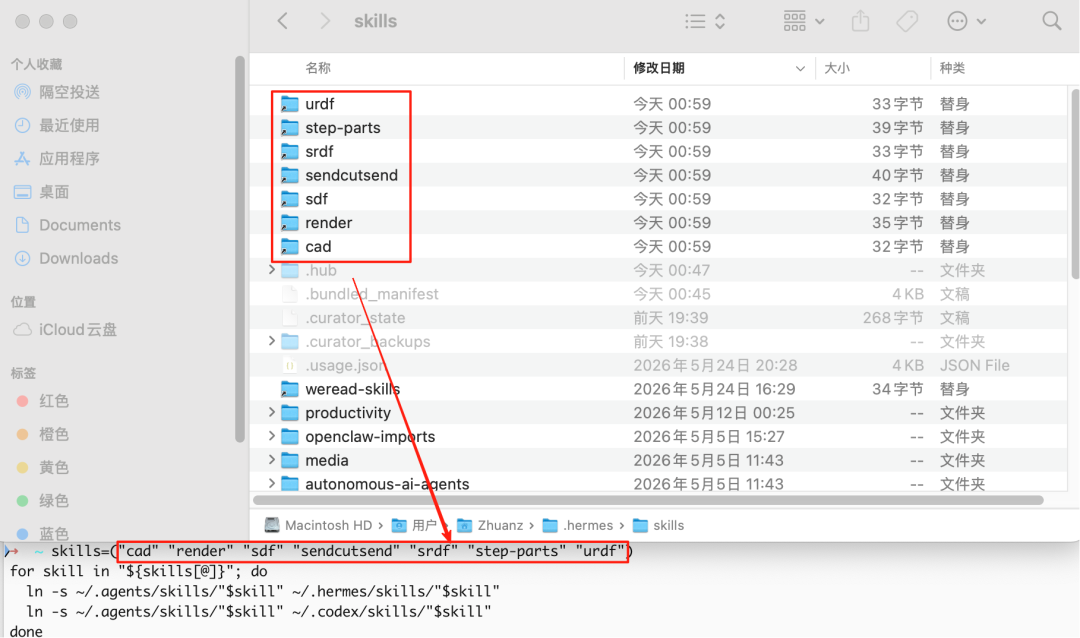
windows参考用命令
for %i in (cad render sdf sendcutsend srdf step-parts urdf) do (
mklink /D "%USERPROFILE%\.hermes\skills\%i" "%USERPROFILE%\.agents\skills\%i"
mklink /D "%USERPROFILE%\.codex\skills\%i" "%USERPROFILE%\.agents\skills\%i"
)Hermes画CAD
启动Hermes,提问ai能不能看到cad相关的skill,ai找到了
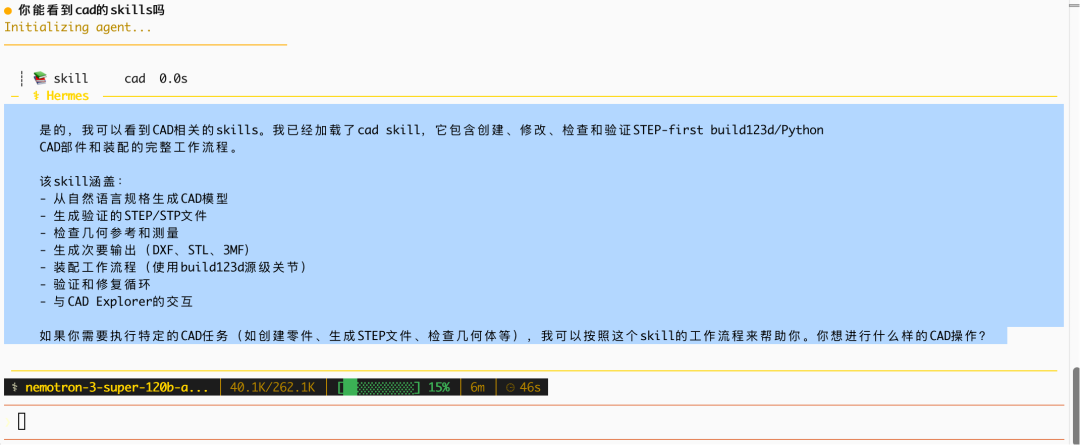
要求ai画工业机器人的cad
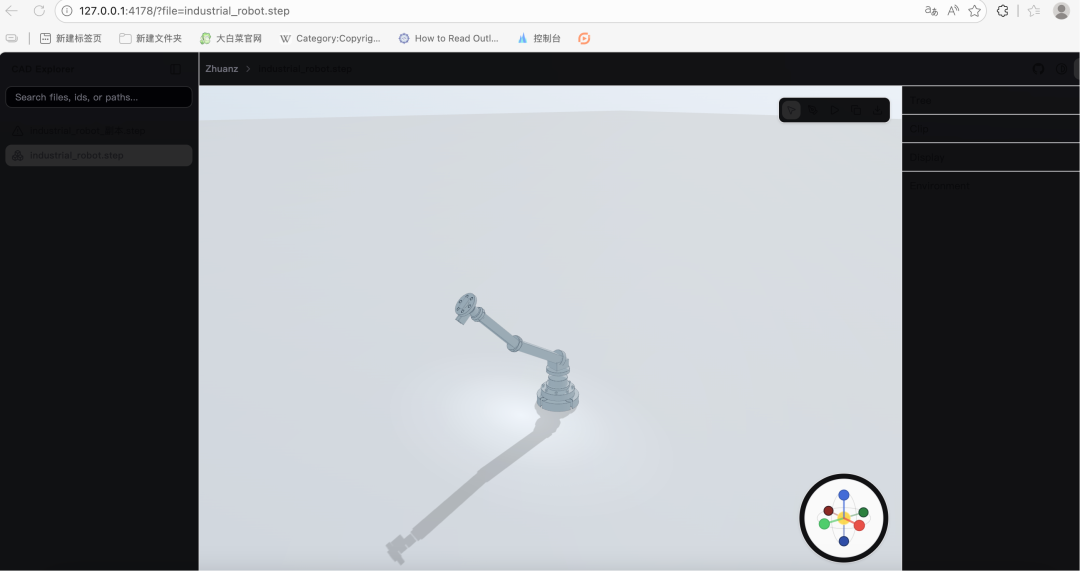
ai参考openclaw的cad代码,生成成功,AI采用resend的skill通过CAD Explorer启动网页
cd /Users/Zhuanz/.hermes/skills/render && npm --prefix scripts/viewer run dev:ensure -- --workspace-root /Users/Zhuanz --file industrial_robot.step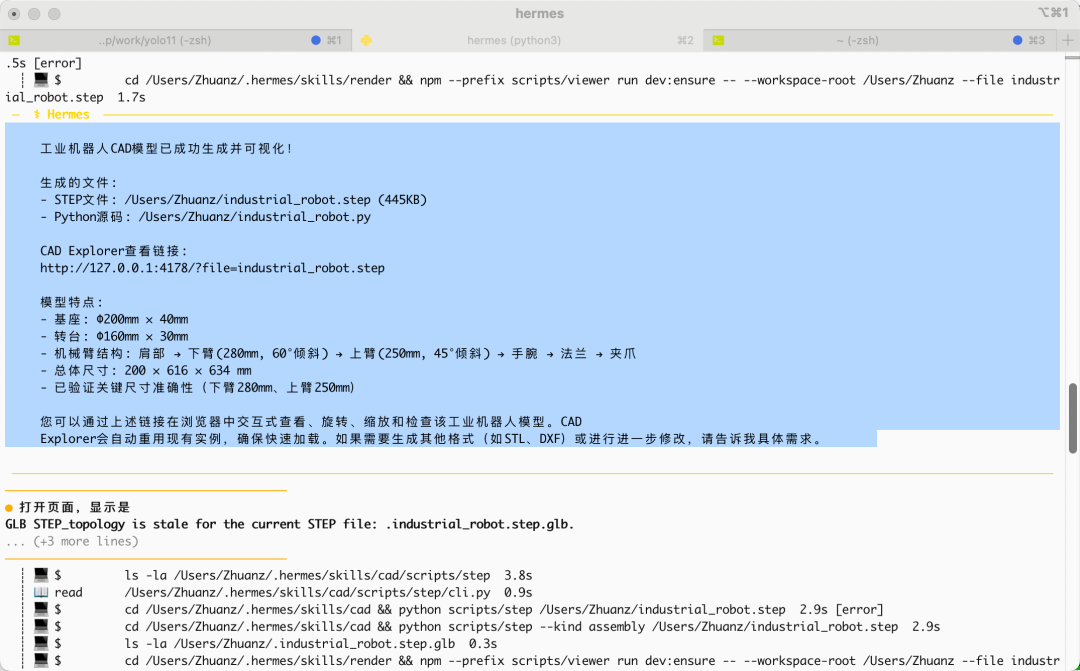
打开http://127.0.0.1:4178/?file=industrial_robot.step,看起来效果还可以
总结与建议
|
维度 |
评价 |
|---|---|
| 易用性 |
安装简单,Agent 直接调用,门槛低于传统 CAD 软件 |
| 精度 |
最终可达工程级,但复杂模型需反复迭代 |
| 迭代效率 |
代码驱动 + |
| 当前局限 |
复杂装配体仍需人工检查坐标、连接缝隙等细节 |
给新手的建议:
-
提示词要具体
不要说“画个机械臂”,要说明:关节数量(如6轴)、各臂长度(如L1=120mm,L2=100mm)、连接方式(如绕Y轴旋转)、安装孔位置等。越接近工程图纸的描述,AI生成的代码越靠谱。 -
善用多模态模型
纯文本模型容易在空间关系上出错,有视觉能力的模型(如 Kimi-K2.6、MiMo-V2.5)能直接“看到”生成的STEP预览,更快发现几何错位、比例失调等问题。 -
CAD专业软件是必备验证工具 + 人工编辑实操
1)移动/旋转零件:用FreeCAD的“Transform”工具手动对齐错位的关节
AI生成的STEP务必导入FreeCAD等专业软件检查(等轴测图看不出的缝隙,换个视角就暴露了)。发现问题后,不必从头重跑AI,可以人工修复:
2)修补缝隙:使用“Part → Create shape from mesh”或“Defeaturing”填补细小间隙
3)调整尺寸:双击AI生成的build123d代码中的参数(如length=120改为125),重新导出即可
4)装配约束:用“A2plus”工作台添加真实约束,替代AI不准确的坐标堆叠
人工编辑+AI迭代混合使用,效率远高于纯靠AI反复抽卡。 -
善用软链接管理 skills
多个Agent共用同一套skills,省空间、易更新(Mac/Linux用ln -s,Windows用mklink /D)。
text-to-cad 不是"一键出图"的魔法,但它确实把 CAD 的设计门槛从"精通软件操作"降到了"会写提示词 + 懂基础几何"。对于机械工程师、机器人开发者、产品设计师来说,这无疑是 AI 时代最值得尝试的工具之一。
创作不易,禁止抄袭,转载请附上原文链接及标题

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 16
16 0
0- 0



 已为社区贡献26条内容
已为社区贡献26条内容

所有评论(0)