【IEEE复现】基于超局部扩展状态观测器的永磁同步电机无模型预测电流控制(Simulink仿真实现)
💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
🎁完整资源、论文复现、期刊合作、论文辅导及科研仿真定制事宜点击:
👉👉👉本文完整资源下载
⛳️座右铭:行百里者,半于九十。
⛳️赠与读者
👨💻做科研,涉及到一个深在的思想系统,需要科研者逻辑缜密,踏实认真,但是不能只是努力,很多时候借力比努力更重要,然后还要有仰望星空的创新点和启发点。建议读者按目录次序逐一浏览,免得骤然跌入幽暗的迷宫找不到来时的路,它不足为你揭示全部问题的答案,但若能解答你胸中升起的一朵朵疑云,也未尝不会酿成晚霞斑斓的别一番景致,万一它给你带来了一场精神世界的苦雨,那就借机洗刷一下原来存放在那儿的“躺平”上的尘埃吧。
或许,雨过云收,神驰的天地更清朗.......🔎🔎🔎
💥第一部分——内容介绍
基于超局部扩展状态观测器的永磁同步电机无模型预测电流控制研究
摘要:传统模型预测电流控制(MPCC)凭借动态响应快、结构简洁、适配性强等优势,广泛应用于永磁同步电机(PMSM)调速控制系统中。但该策略高度依赖电机精准参数,当电机电感、电阻等参数发生摄动或出现参数失配问题时,系统稳态精度与动态性能会显著劣化,抗扰动鲁棒性不足。针对该痛点,本文提出一种基于超局部模型与扩展状态观测器(ESO)的无模型预测电流控制(MFPCC)策略。该控制方案摒弃了传统控制算法对电机本体参数的依赖,仅利用系统输入输出信号构建超局部模型,通过扩展状态观测器实时观测系统未知扰动与模型不确定性,实现动态补偿。仿真工况设置1s加载、2s减载、3s加速、4s减速的多工况测试,结果表明,所提策略可有效适配电机变速、变负载运行场景,在参数失配条件下仍可保持优异的控制稳定性,显著降低电流跟踪误差与动态超调量,相较于传统MPCC策略具备更强的鲁棒性与工况适配能力。
关键词:电流控制;扩展状态观测器;预测控制;鲁棒性;超局部模型;无模型预测
1 引言
永磁同步电机凭借高效率、高功率密度、低运行损耗等优势,在工业调速、新能源驱动、精密伺服控制等领域得到大规模应用,其高性能电流控制策略是保障电机稳定、精准运行的核心关键[1]。模型预测电流控制作为一种先进的电机控制策略,依托有限控制集优化特性,可实现多约束条件下的实时最优控制,具备动态响应迅速、控制逻辑直观、无需复杂调制模块等突出优点,成为当下PMSM高精度控制的研究热点[2]。
传统MPCC算法的控制性能完全依托精准的电机数学模型,控制器运行过程中需要实时调用电机电阻、电感、永磁体磁链等固有参数[3]。但电机实际运行过程中,受温度温升、磁路饱和、负载波动、老化损耗等因素影响,电机参数会持续发生偏移,导致控制器理论模型与实际运行模型严重失配,最终引发电流跟踪滞后、稳态误差增大、动态超调超标等问题,大幅降低控制系统的鲁棒性与可靠性,限制了传统MPCC在复杂工况下的工程应用[4]。
为解决参数失配带来的控制性能劣化问题,无模型控制技术逐步应用于电机预测控制领域。基于超局部模型的控制策略无需依赖被控对象精准数学模型,通过系统实时输入输出数据构建局部动态模型,可有效规避电机参数摄动带来的负面影响,为参数敏感型控制问题提供了全新解决思路[5]。与此同时,扩展状态观测器可将系统内部参数不确定性、外部负载扰动等复合扰动统一观测估计,并通过前馈补偿方式抵消扰动影响,具备优异的抗扰动能力,可进一步优化无模型控制系统的稳态与动态性能[6]。
目前现有多数无模型预测控制研究仅实现了参数无关控制,但在多工况切换、动态扰动抑制方面的性能仍有提升空间,针对变速、变负载复合工况的适配性不足[7]。基于此,本文融合超局部模型与扩展状态观测器技术,构建高性能无模型预测电流控制策略。该策略完全脱离电机本体参数依赖,通过ESO实时观测系统未知动态与扰动,实现精准动态补偿。通过设置加载、减载、加速、减速全工况仿真测试,验证所提策略在参数失配、工况切换场景下的控制精度、动态响应速度与运行稳定性,为永磁同步电机无参数高精度控制提供技术参考。
2 传统模型预测电流控制特性与缺陷分析
2.1 传统MPCC控制优势
传统有限控制集模型预测电流控制依托逆变器有限开关状态特性,结合电机离散数学模型,对未来时刻电流状态进行预测,通过代价函数筛选最优电压矢量,实现电机电流的闭环最优控制。该控制策略核心优势显著,其一,控制结构简洁直观,无需PI调节器参数整定,规避了传统线性控制参数调试繁琐、适配性差的问题;其二,动态响应速度极快,可在单个控制周期内完成状态预测与最优控制量输出,能够快速响应指令变化与工况波动;其三,约束适配能力强,可灵活融入电流、电压等多重约束条件,适配电机高精度控制需求[8]。凭借上述优势,传统MPCC在常规额定工况、参数匹配精准的场景中可实现优良的控制效果。
2.2 传统MPCC核心缺陷
传统MPCC的固有短板在于参数强依赖性,其预测模型、代价函数运算均依托精准的电机电阻、直交轴电感等参数。电机实际运行过程中,各类工况变化都会引发参数偏移:长期运行温升会导致定子电阻增大,高负载工况下磁路饱和会造成电感参数衰减,永磁体老化会引发磁链偏移[9]。上述参数变化会直接导致预测模型失效,控制器预测值与电机实际运行状态偏差持续增大。
在参数失配状态下,传统MPCC会出现明显的性能劣化,主要表现为稳态电流脉动加剧、电流跟踪误差增大,在负载突变、转速切换等动态工况下,会出现严重的动态超调、响应滞后,甚至引发系统震荡,严重威胁电机控制系统的运行稳定性,无法满足复杂多变工业工况下的高精度、高鲁棒性控制需求[10]。因此,摆脱电机参数依赖、提升系统抗参数扰动与外部扰动能力,是优化MPCC控制性能的核心突破口。
3 基于超局部ESO的无模型预测电流控制策略设计
3.1 超局部模型构建原理
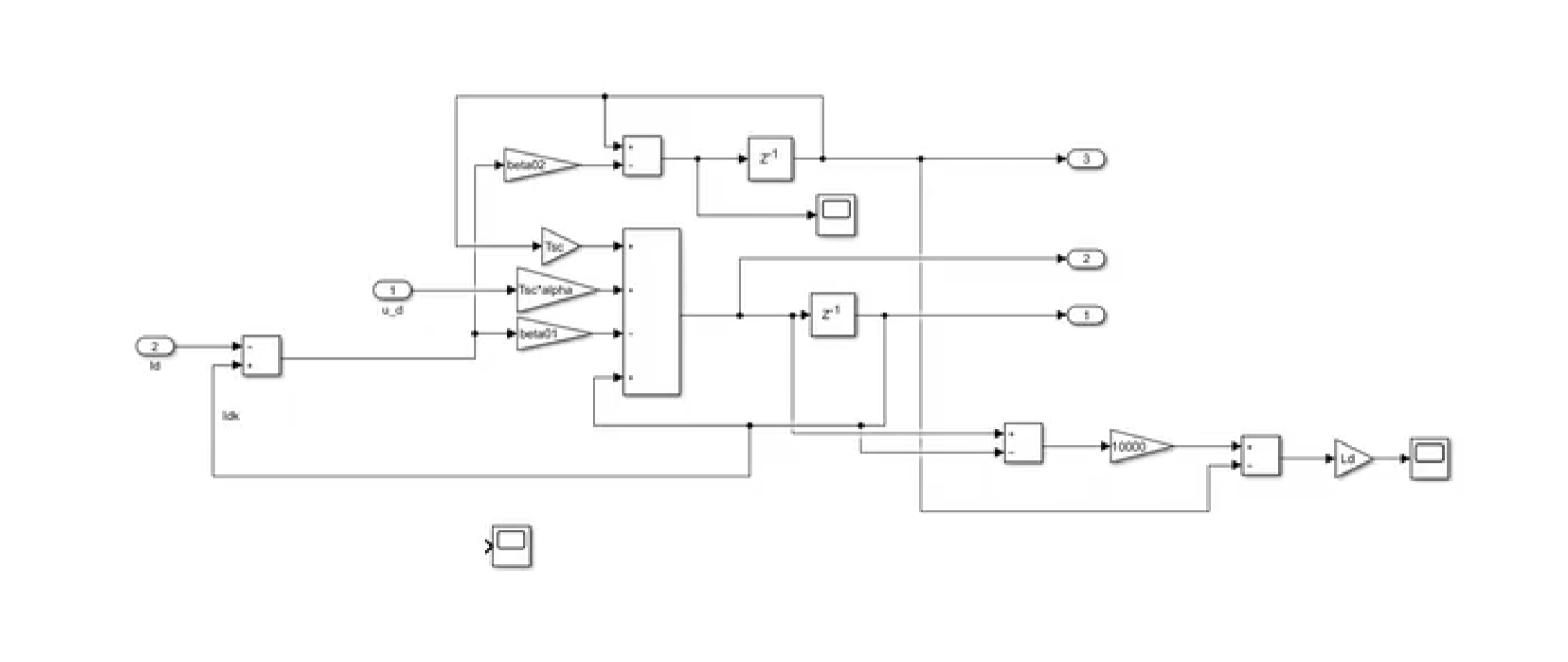
为彻底规避电机参数失配问题,本文引入超局部模型替代传统PMSM精准数学模型。超局部模型是一种无模型动态建模方法,摒弃对被控对象物理参数与固有模型的依赖,仅通过控制系统实时输入、输出信号描述系统动态特性,适用于各类非线性、参数时变、模型不确定系统[11]。该模型将电机控制系统的复杂动态、参数不确定性、外部负载扰动等全部未知量统一归为系统综合未知动态,通过实时数据迭代更新模型状态,无需辨识电机电阻、电感、磁链等固有参数,从根源上消除了参数摄动对控制性能的影响。
相较于传统基于精准模型的控制策略,超局部模型仅聚焦系统输入输出动态关系,模型结构简单、实时性强,可自适应适配电机不同运行状态。无论是稳态恒速运行,还是负载突变、转速动态切换工况,超局部模型均可通过实时数据更新精准刻画系统当前动态特性,为预测控制提供可靠的模型支撑,大幅提升控制系统的工况适配性与参数鲁棒性[12]。
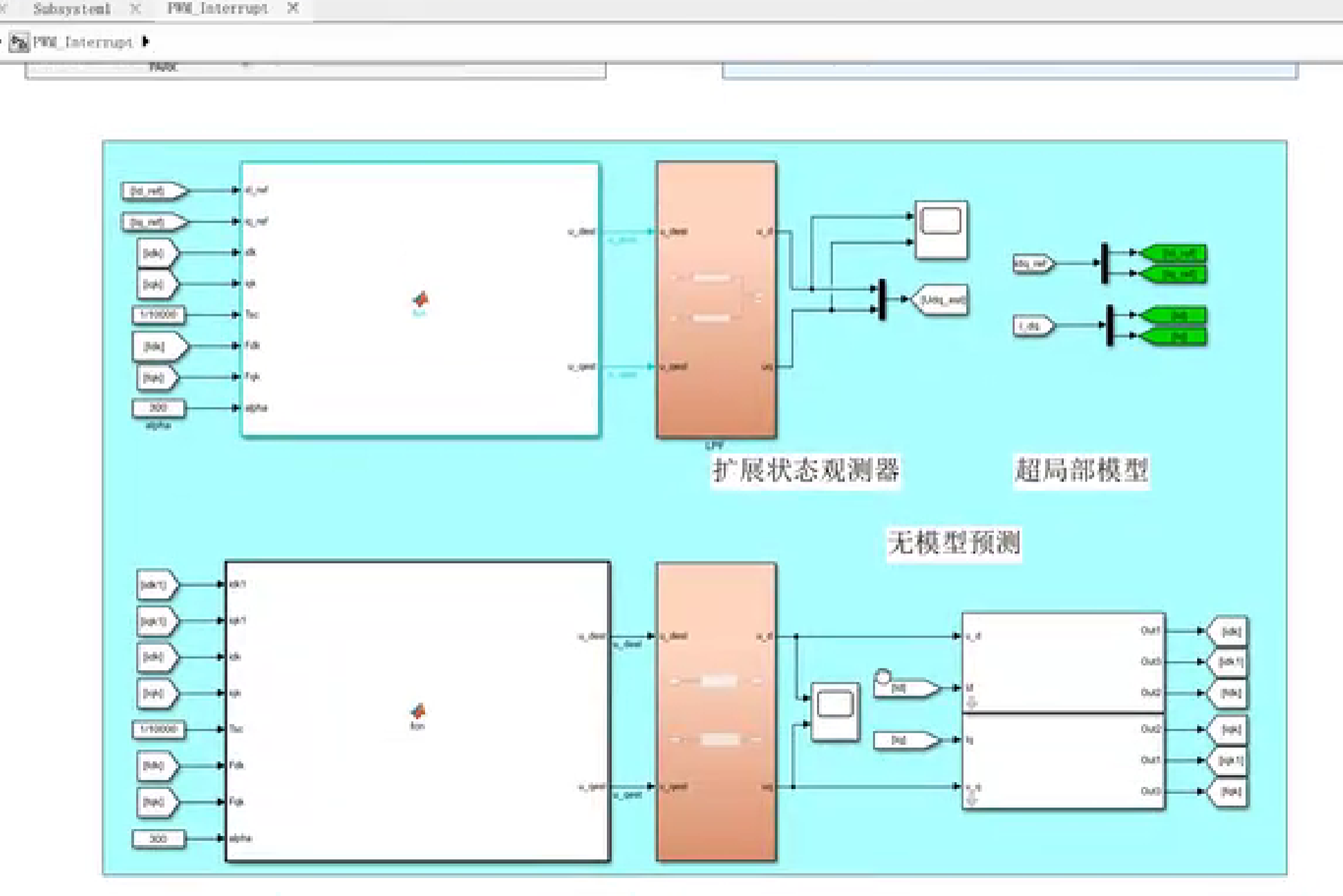
3.2 扩展状态观测器扰动观测机制
为进一步抑制系统未知扰动、提升无模型控制的稳态精度,本文引入扩展状态观测器对超局部模型中的未知综合扰动进行实时观测与补偿。ESO的核心优势是无需扰动精准模型,可将系统内部参数偏移、未建模动态、外部负载扰动等所有不确定因素扩张为新的系统状态,实现全方位观测[13]。
在本文控制架构中,ESO实时采集电机电流反馈信号与控制输入信号,动态观测系统未知动态扰动,并将观测得到的扰动值实时反馈至预测控制环节,通过前馈补偿方式抵消扰动对电流控制精度的影响。同时,ESO具备优异的动态响应能力,可快速跟踪工况突变引发的扰动变化,有效解决超局部模型在动态切换过程中存在的观测滞后问题,抑制动态超调与跟踪误差,保障系统在变速、变负载工况下的平稳运行[14]。
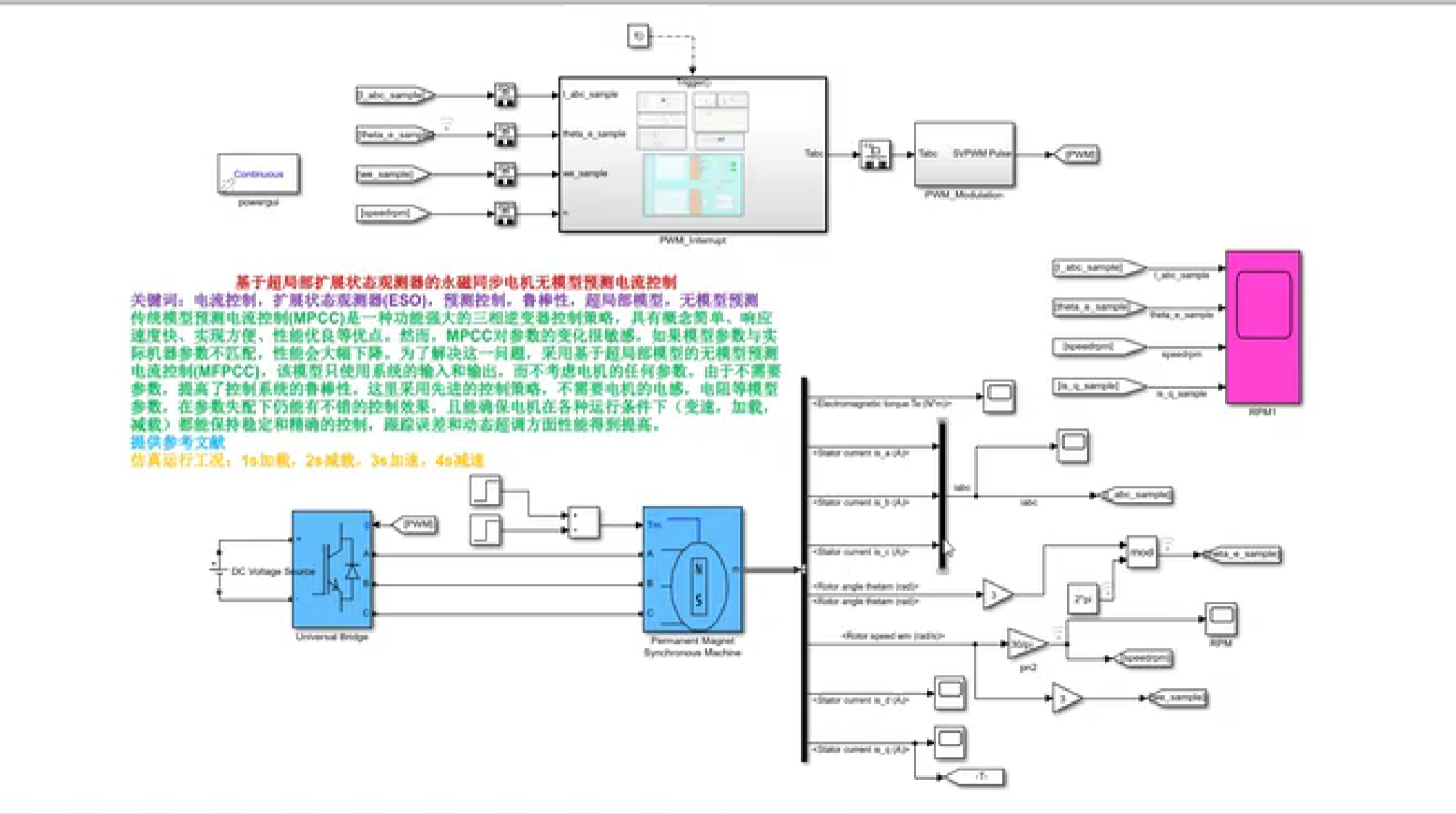
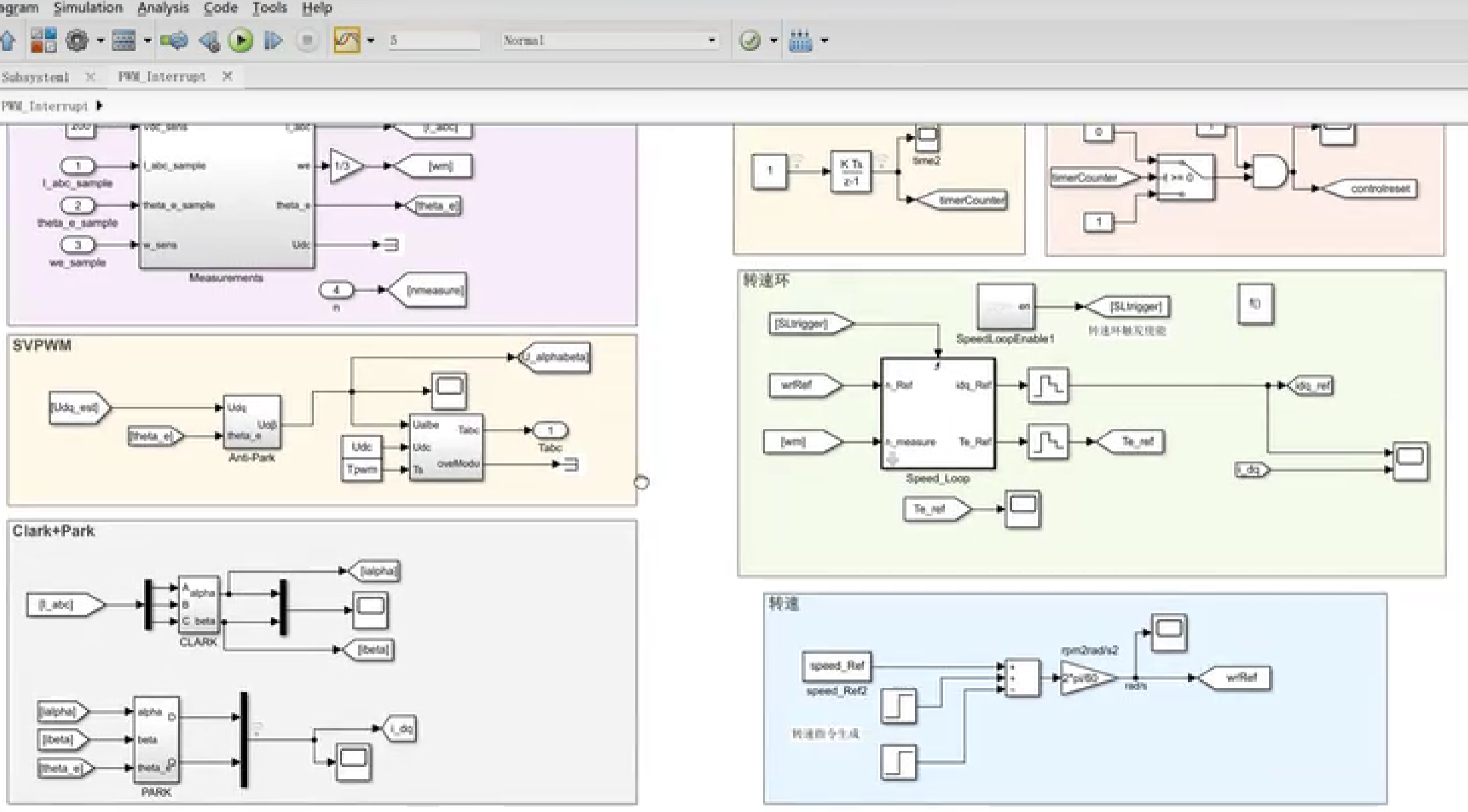
3.3 无模型预测电流控制整体架构
本文所提MFPCC策略以超局部模型为预测基础,以ESO为扰动观测补偿核心,整体控制流程无需任何电机本体参数参与。控制系统通过实时采集电机实际运行电流、转速信号,依托超局部模型完成系统动态建模,结合电流指令值完成未来时刻电流状态预测;同时通过扩展状态观测器实时修正预测模型误差、补偿综合扰动;最终通过代价函数优化筛选最优控制输出,实现电机电流的高精度闭环控制。
该控制架构完全摆脱了传统MPCC对电机参数的依赖,仅依靠系统输入输出数据实现全工况自适应控制,既保留了传统预测控制动态响应快、控制精度高的优势,又彻底解决了参数失配导致的性能劣化问题,同时通过ESO的扰动补偿能力,大幅提升了系统在复杂动态工况下的鲁棒性与稳定性。
4 仿真工况与性能分析
4.1 仿真工况设置
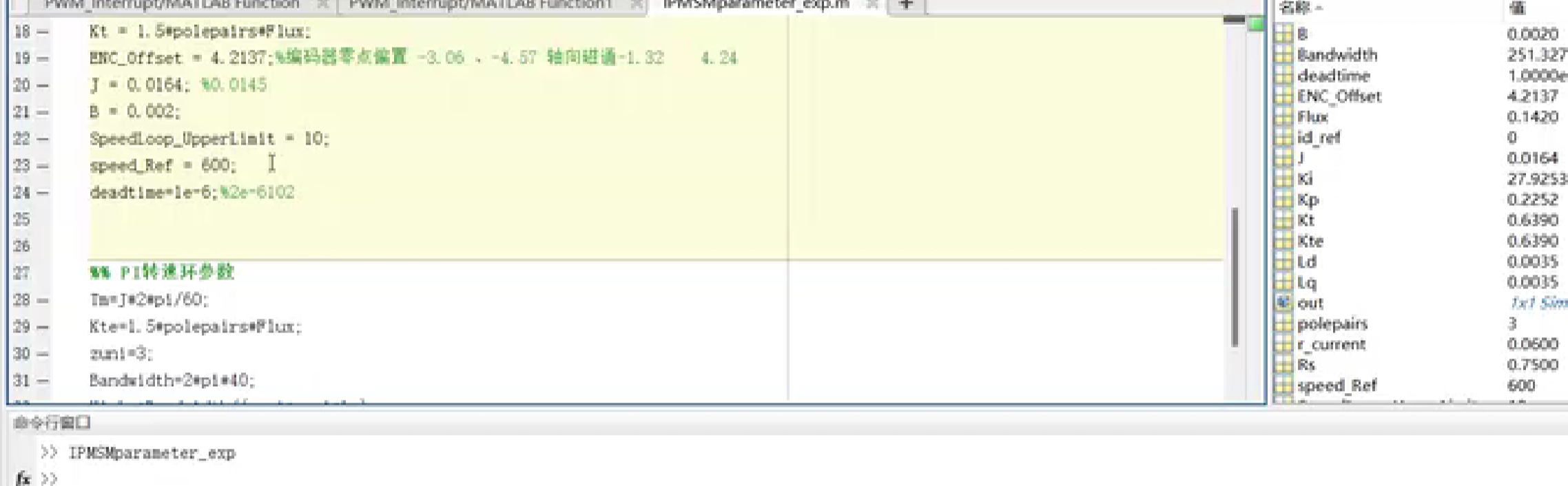
为全面验证所提策略在动态工况切换、负载扰动、参数失配条件下的控制性能,本文设置多阶段复合仿真工况,完整覆盖电机变负载、变速运行场景,具体工况配置如下:系统初始状态为空载额定转速运行;1s时刻施加额定负载加载扰动;2s时刻完成减载操作,恢复空载状态;3s时刻执行加速指令,提升电机运行转速;4s时刻执行减速指令,回落至初始转速。仿真全过程引入电机参数失配条件,模拟实际工程中参数偏移、温升扰动等工况,对比分析传统MPCC与本文所提MFPCC策略的控制性能差异。
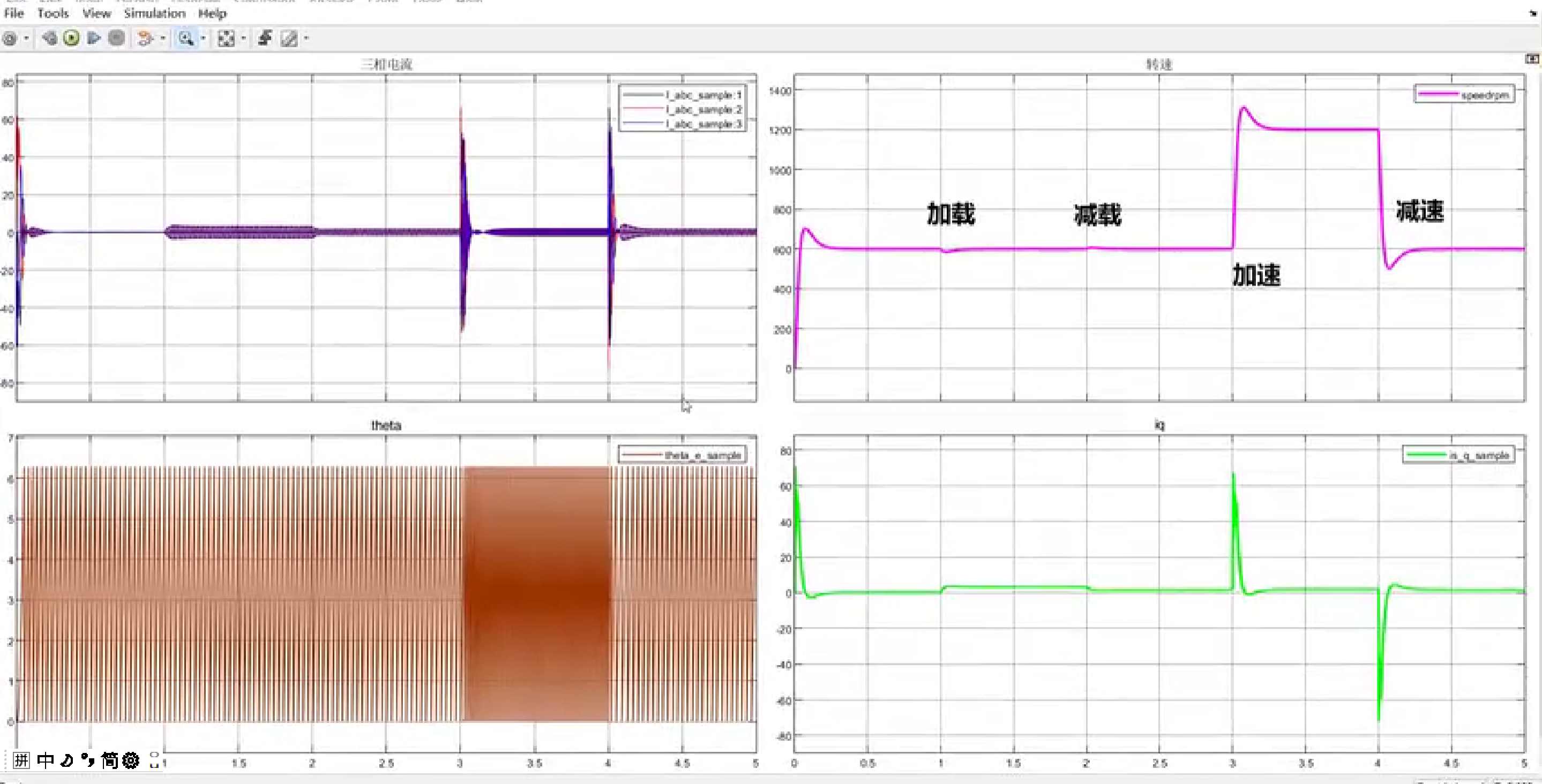
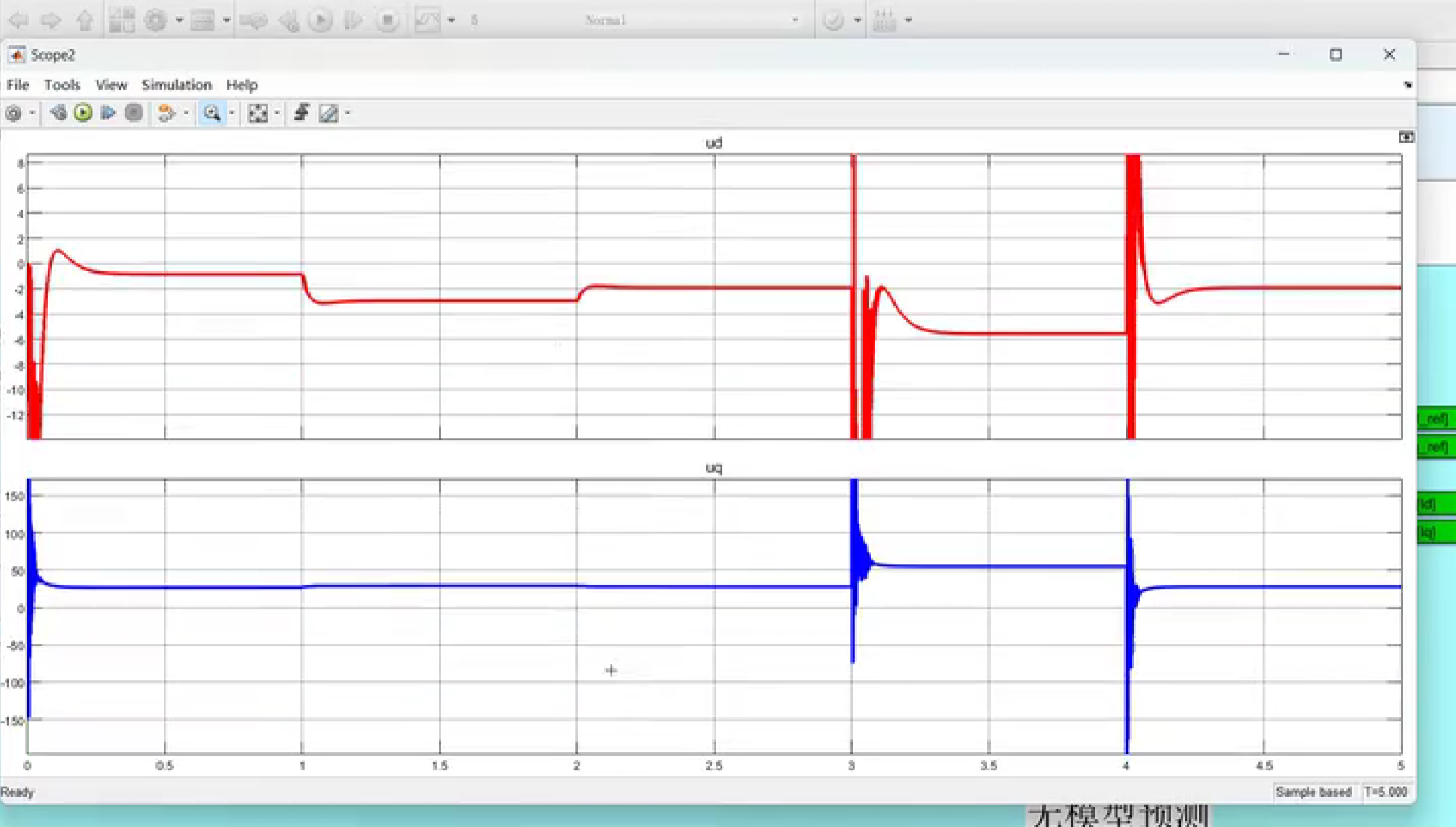
4.2 稳态性能分析
在稳态运行阶段,传统MPCC因存在参数失配问题,电流稳态脉动较大,存在明显的静态跟踪误差,且负载变化后稳态误差会进一步扩大。而本文所提MFPCC策略依托超局部模型的无参数建模特性,结合ESO的精准扰动补偿能力,可有效消除参数失配带来的稳态偏差。在加载、减载后的稳态运行阶段,电流波形平滑、脉动极小,电流指令跟踪精度显著提升,稳态控制精度远优于传统MPCC策略,具备优异的稳态控制性能。
4.3 动态工况性能分析
针对1s加载、2s减载的负载突变工况,传统MPCC受参数失配影响,负载切换瞬间会出现显著的电流超调,响应调整时间较长,动态波动剧烈,易引发系统短时震荡。而所提MFPCC策略可快速感知负载扰动变化,ESO实时观测并补偿负载突变带来的动态扰动,有效抑制电流动态超调,缩短系统响应调整时间,负载切换过程平稳无剧烈波动。
针对3s加速、4s减速的转速切换工况,传统MPCC在转速动态调节过程中,参数失配问题会导致预测模型偏差持续累积,出现转速跟踪滞后、电流动态畸变等问题,动态控制性能劣化严重。本文策略无需依赖电机参数,超局部模型可自适应匹配转速动态变化特性,结合ESO的动态扰动修正能力,实现转速快速无差跟踪,电流动态波形平滑,无明显超调与滞后,动态响应性能优异,可完美适配电机变速运行工况。
4.4 鲁棒性分析
仿真全程参数失配条件下的测试结果表明,传统MPCC对电机参数变化高度敏感,参数偏移会全面劣化系统稳态、动态性能,工况适配性极差。而本文所提基于超局部ESO的无模型预测电流控制策略,完全脱离电机本体参数约束,对参数摄动、外部负载扰动、转速工况波动均具备极强的抗干扰能力,在多工况切换过程中始终保持稳定、精准的控制效果,鲁棒性与工程适配性显著优于传统控制策略。
5 结论
针对传统永磁同步电机模型预测电流控制参数敏感度高、参数失配下性能劣化、复杂工况鲁棒性差的问题,本文提出一种基于超局部扩展状态观测器的无模型预测电流控制策略。该策略依托超局部模型实现无参数建模,彻底摆脱对电机电阻、电感等本体参数的依赖,从根源上解决参数失配引发的控制性能下降问题;同时引入扩展状态观测器实时观测系统综合扰动并完成前馈补偿,有效抑制动态工况下的电流超调与跟踪误差,提升系统动态响应性能与稳态控制精度。
多工况仿真测试结果验证了所提策略的优越性,在1s加载、2s减载、3s加速、4s减速的复合工况下,该策略相较于传统MPCC,具备更小的稳态电流脉动、更低的跟踪误差与更优的动态响应特性,在参数失配条件下仍可保持稳定高精度控制,显著提升了控制系统的鲁棒性与工况适配能力。后续可进一步优化观测器结构与控制算法逻辑,适配高速重载、强扰动等极端工业工况,推动无模型预测控制技术在永磁同步电机高精度伺服控制领域的工程应用。
📚第二部分——运行结果
🎉第三部分——参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。(文章内容仅供参考,具体效果以运行结果为准)
🌈第四部分——本文完整资源下载
资料获取,更多粉丝福利,MATLAB|Simulink|Python|数据|文档等完整资源获取

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 0
0 0
0- 0



 已为社区贡献300条内容
已为社区贡献300条内容

所有评论(0)