【跟练版】零基础也能做:孪生体机械臂数字孪生实时控制从0到1,一文搞定!

在数字孪生系统开发中,孪生体参数化调整是实现“数据驱动”的核心环节。它让静态的三维模型变成一个能够响应实时数据的“活”的孪生体。
本文将基于实际开发流程,手把手教你如何使用孪生体编辑器,完成从孪生体导入到参数绑定、实时驱动的完整操作。跟着做,你也能快速实现机械臂等设备的数字孪生控制。
认识孪生体编辑器
孪生体编辑器是数字孪生开发平台中的核心工具,它允许开发者将三维模型与实时数据流进行可视化绑定。简单来说,它解决了“如何让模型动起来”的问题——通过图形化界面,将传感器数据或模拟数据直接映射到模型的关节运动、颜色变化、显隐切换等属性上,无需编写复杂的通信代码。
01
打开孪生体独立工程包
第一步
操作步骤
首先,我们需要找到并打开包含孪生体配置的独立工程包。假设你的工程包路径名为孪生体_3198,具体操作如下:
1
打开CIMPro孪大师
在项目文件导航中找到孪生体_3198文件夹。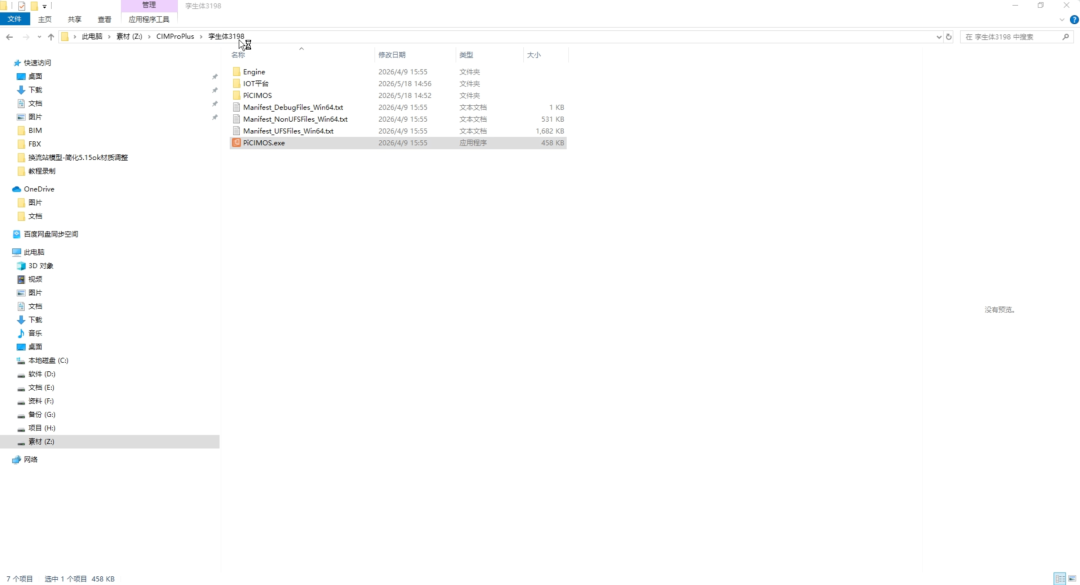
2
定位到孪生体
登录进入平台后,建议先忽略其他默认项目,直接定位到“孪生体”模块。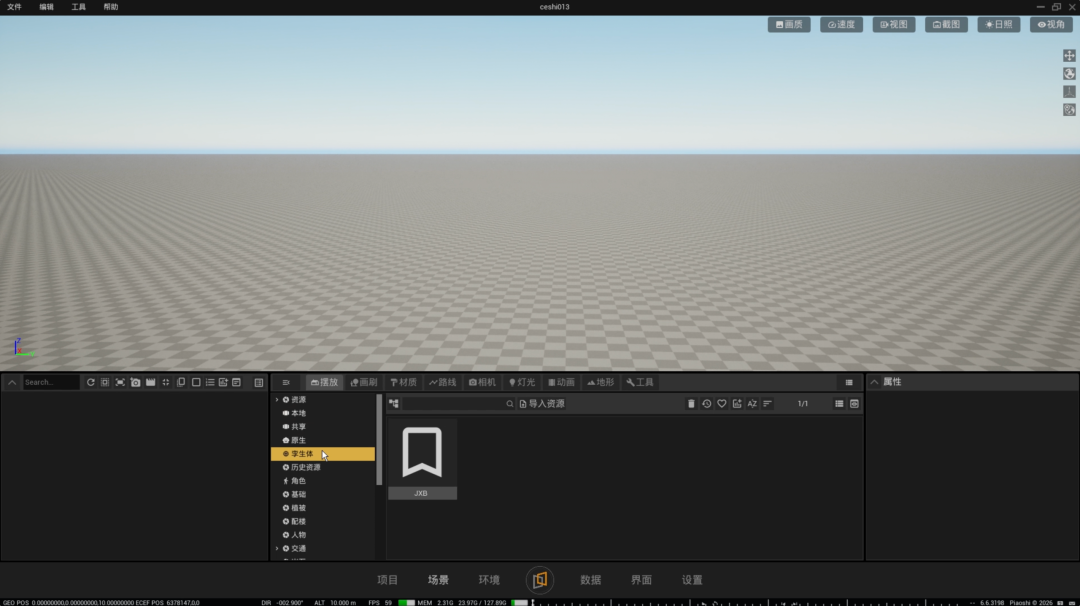
3
查看孪生体示例
此时,你应该能看到已经注册好的孪生体实例。以本文的演示为例,列表中已包含示例:
孪生体_机械臂
一个多关节机械臂模型,包含底座、底盘、各关节等可动部件: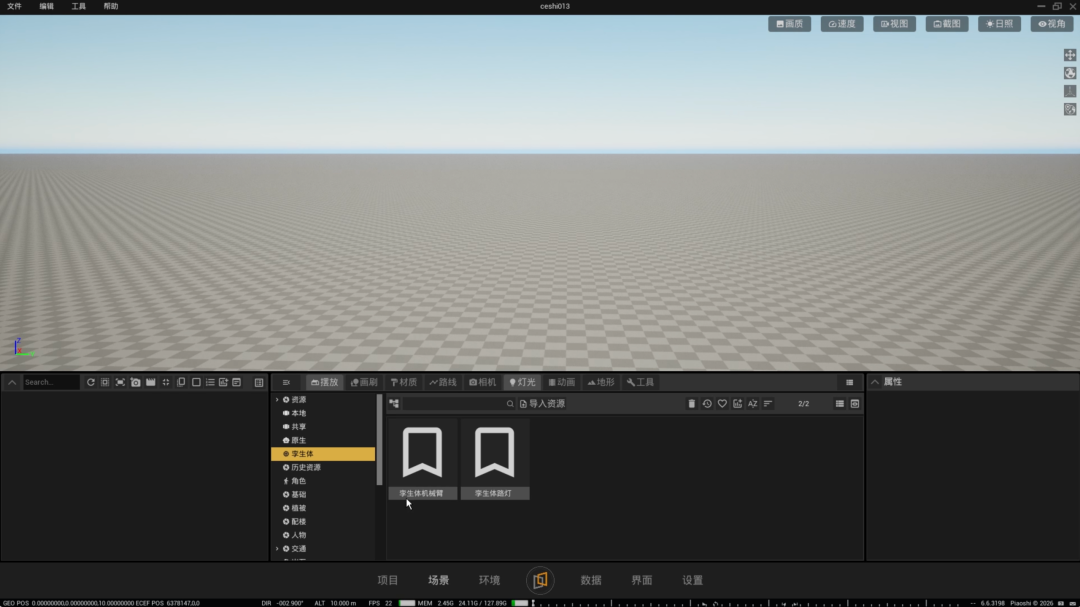
02
导入孪生体并验证参数
第二步
操作步骤
接下来,我们将演示用的机械臂孪生体拖入场景中:
1
拖入三维场景中
从孪生体列表中,将孪生体_机械臂拖拽到当前的三维场景编辑区。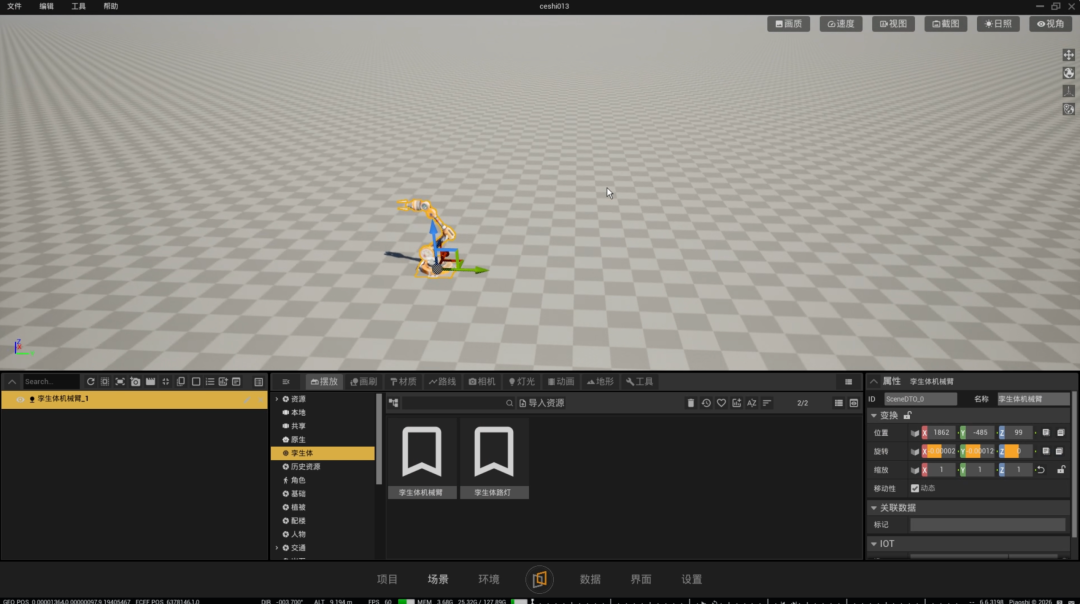
2
参数化属性面板
观察模型结构,你会看到机械臂的底座、底盘以及各个关节都已经预先定义了相应的参数化属性。这些属性就是后续与数据绑定的“接口”。**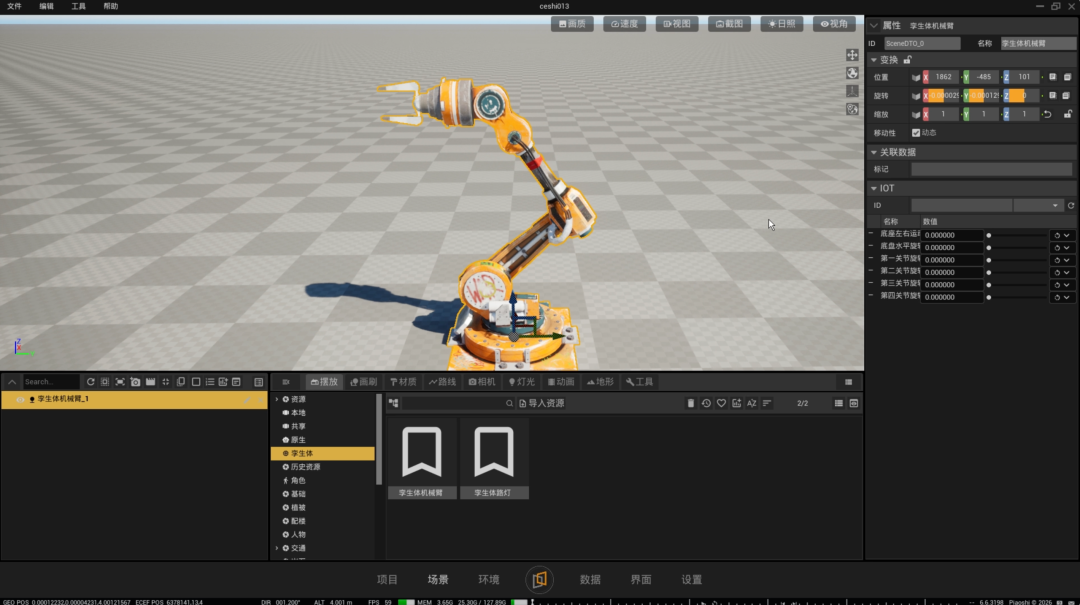
**
3
可参数化调整的部件
在右侧的属性面板中,你可以查看每个部件的可调参数,例如:
底座的“左右运动”范围
底盘的“水平旋转”角度
各关节的“俯仰”、“偏转”等运动参数
03
运行IOT平台脚本
第三步
操作步骤
要实现数据驱动,孪生体需要能够接收外部数据。为此,我们需要启动配套的数据服务:
1
找到IOT平台文件
在孪生体_3198文件夹中,找到名为IOT平台的子文件夹。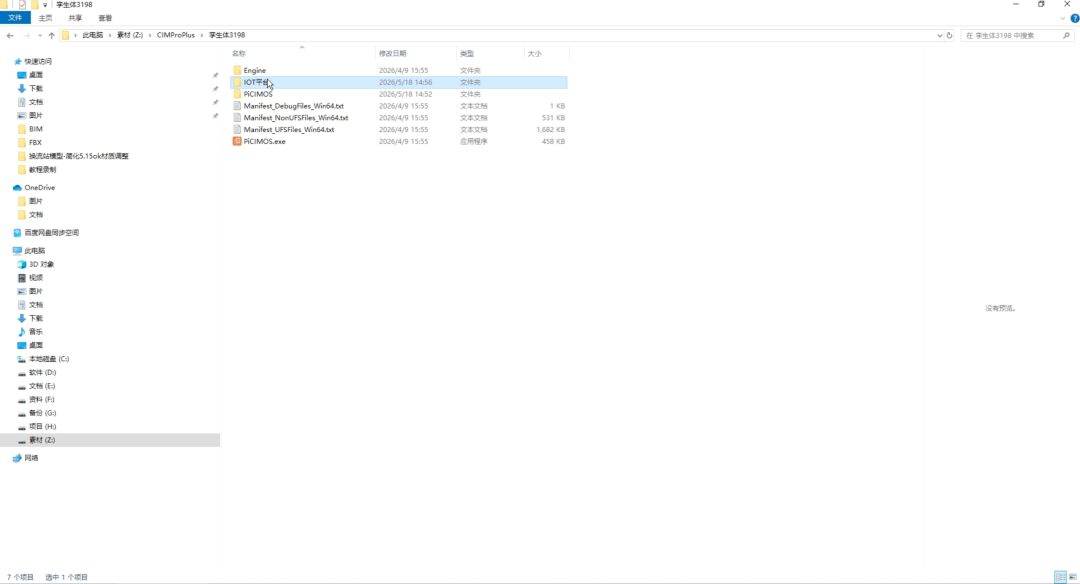
2
运行路径映射脚本
首先运行一个路径映射脚本,它的作用是将当前工作目录正确映射到脚本执行路径下,确保后续操作能正确找到所有依赖文件。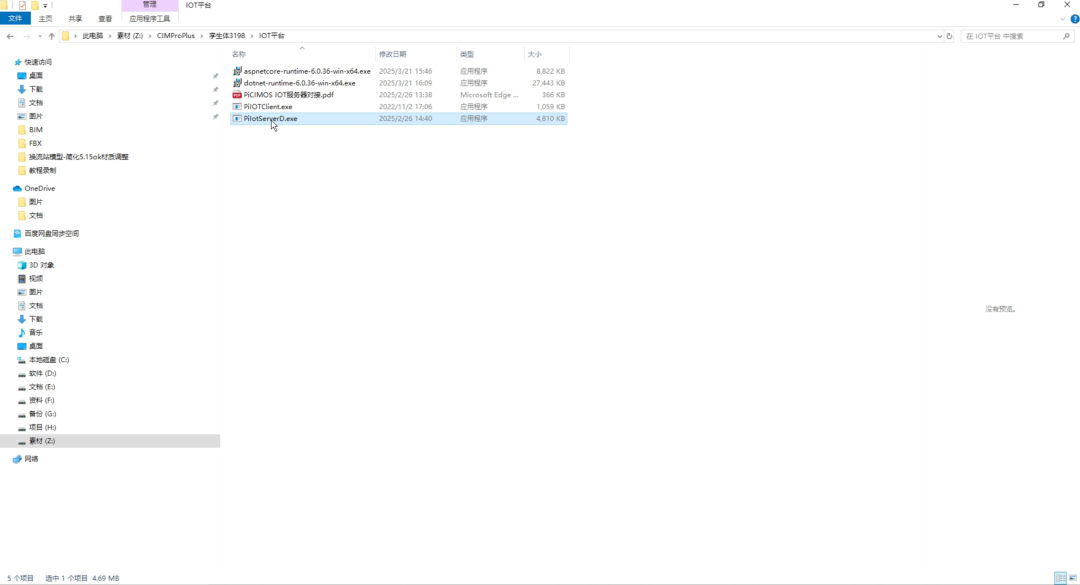
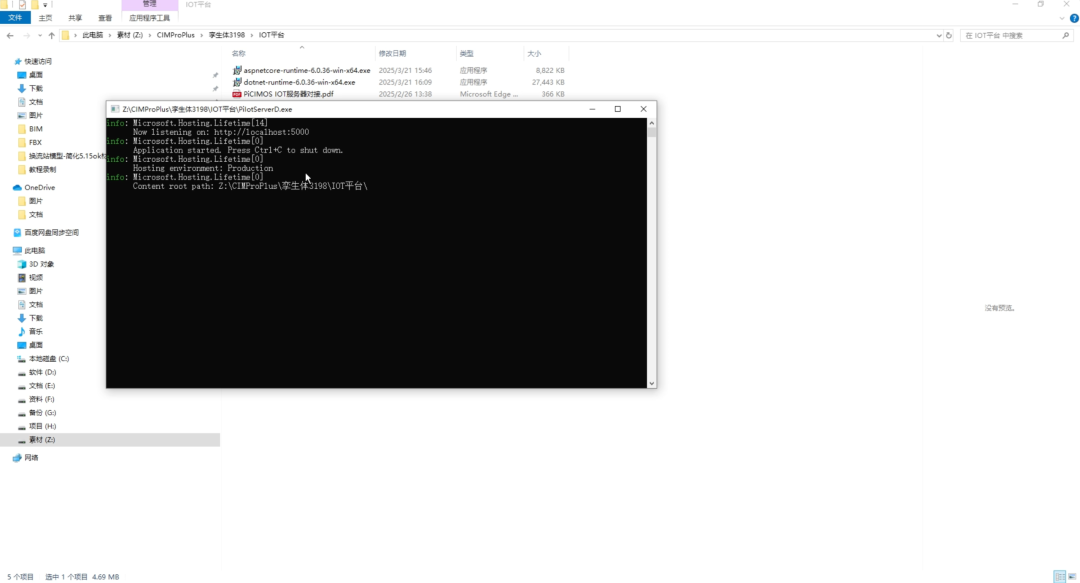
运行完成后,可以关闭此脚本窗口。
3
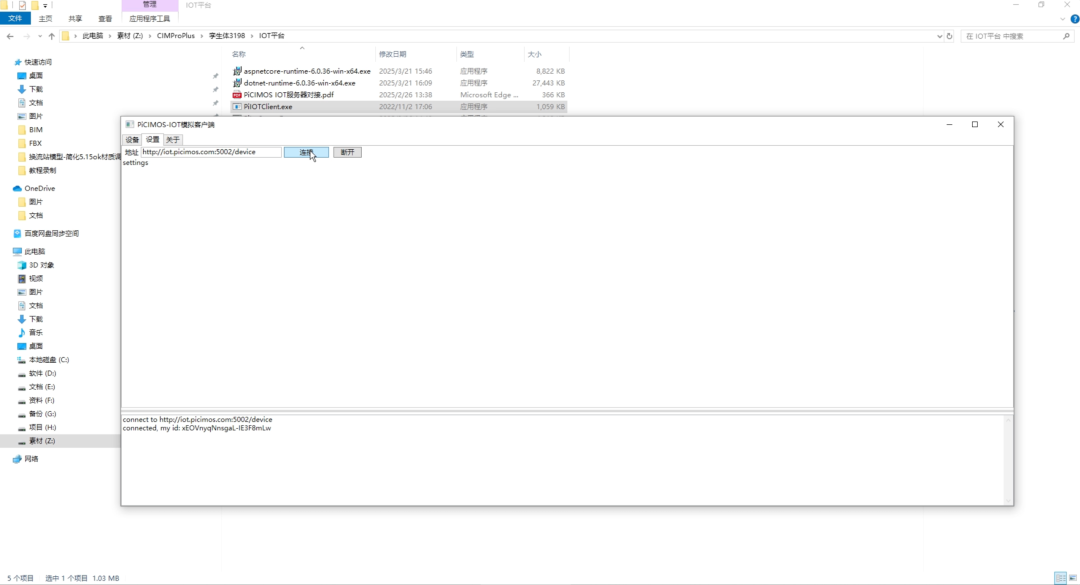
运行客户端平台
接着运行客户端平台程序。启动后,进入“设置”菜单,选择“链接”选项,确保客户端与数据服务建立了连接。
04
数据绑定与实时驱动
第四步
操作步骤
这一步是整个流程的核心——将模拟或真实的IoT数据映射到孪生体的参数上:
1
切换到客户端界面
在客户端中,你会看到一系列已注册的IoT设备ID列表。
2
选择设备
选择一个设备例如选择ID为“3”的设备。这个设备可以是一个真实的传感器,也可以是一个模拟数据源。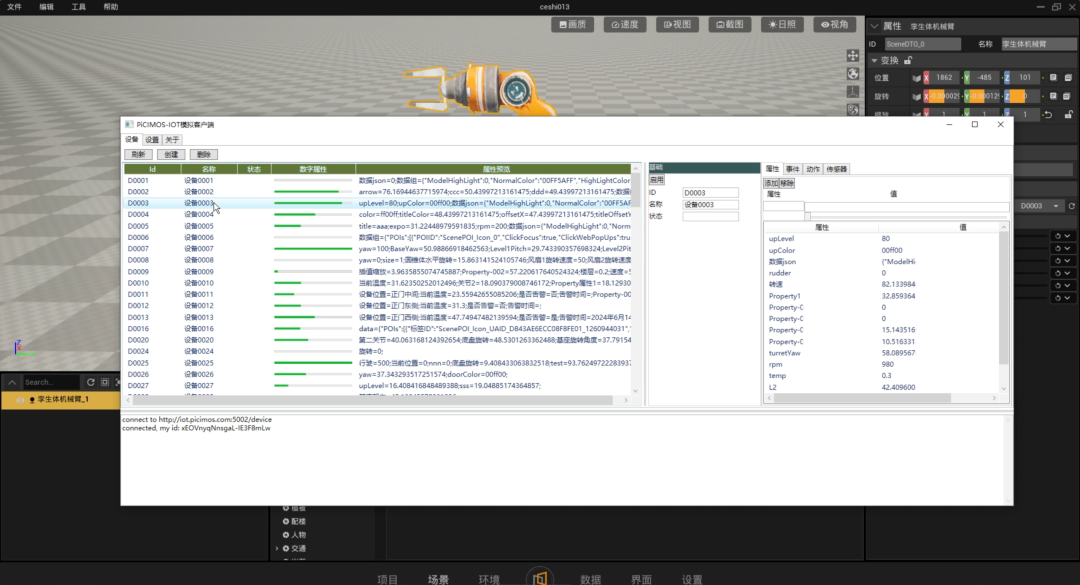
3
添加参数绑定
找到“参数添加”或“属性配置”功能区域。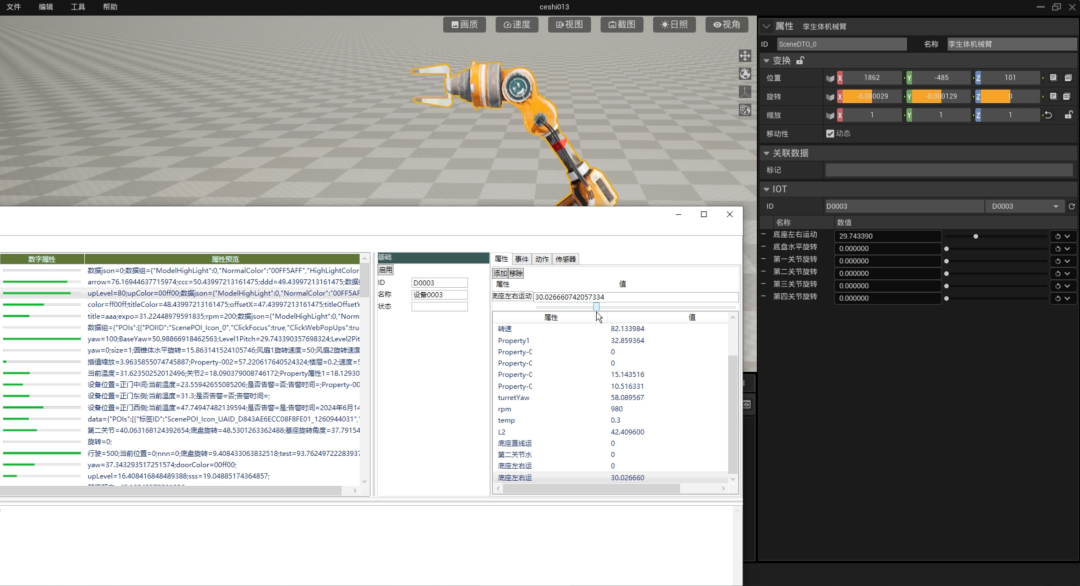
第一个参数:
选择属性“底座左右运动”,将其绑定到3号设备的一个数据字段上。配置完成后,你会立即看到三维场景中机械臂的底座开始按照数据值进行左右移动。
第二个参数:
选择属性“底盘水平旋转”,同样绑定到3号设备的数据字段。绑定后,机械臂底盘立即响应旋转运动。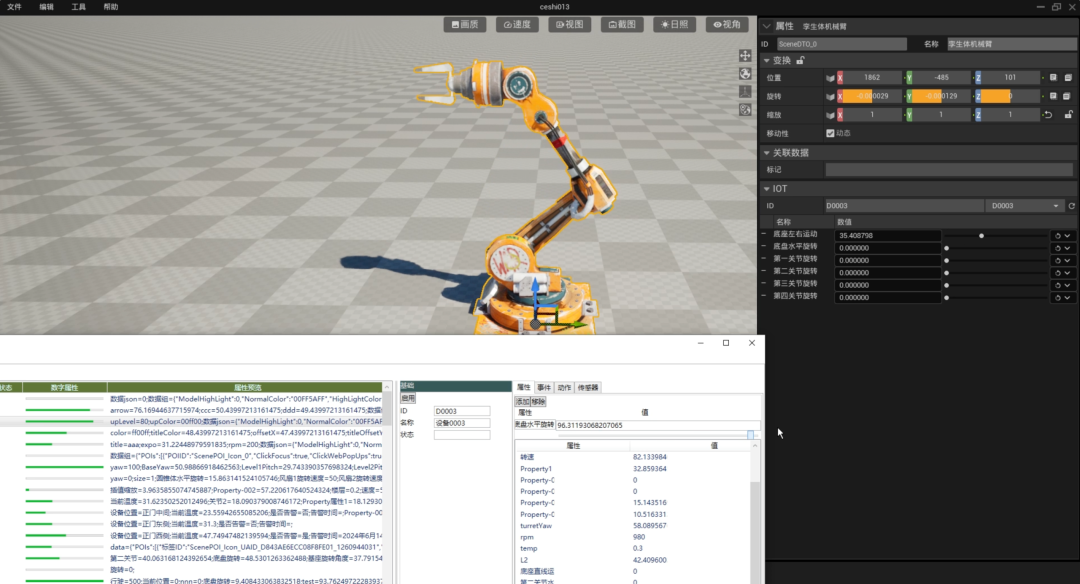
原理说明:这一步的本质是在孪生体编辑器中建立了一个“映射关系”——将IoT数据流中的某个数值范围(如0-100),映射到模型某个关节的旋转角度或位移距离上。当数据发生变化时,模型自动响应,实现“数据驱动”的实时同步。
成果验收
通过上述步骤,你已经完成了一个完整的数据驱动闭环:从孪生体导入、参数验证、数据服务启动,到IoT数据绑定与实时控制。
这套方法论可以广泛应用于工业设备监控、机器人控制、智慧园区等多个场景。

孪生体参数化调整的核心在于“可视化配置”:
无需编写底层代码,通过图形化的绑定操作,就能让静态模型“活”起来,响应真实世界的每一次变化。
这正是数字孪生从“可视化展示”走向“数据驱动决策”的关键能力所在。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐



 3
3 0
0- 0



 已为社区贡献15条内容
已为社区贡献15条内容

所有评论(0)