锐评一下2026年市场上的倾斜摄影、激光点云、3D高斯、4D高斯、BIM这5大建模方式

在数字孪生、三维重建、工程可视化等领域,建模技术层出不穷。倾斜摄影、激光点云、3D高斯(3D Gaussian Splatting)、4D高斯(动态高斯泼溅)以及BIM(建筑信息模型)各有拥趸,也各有争议。
本文不吹不黑,从技术特色、优劣势、适用场景与不适用场景四个维度,对这五种建模方式进行一次硬核锐评。

倾斜摄影
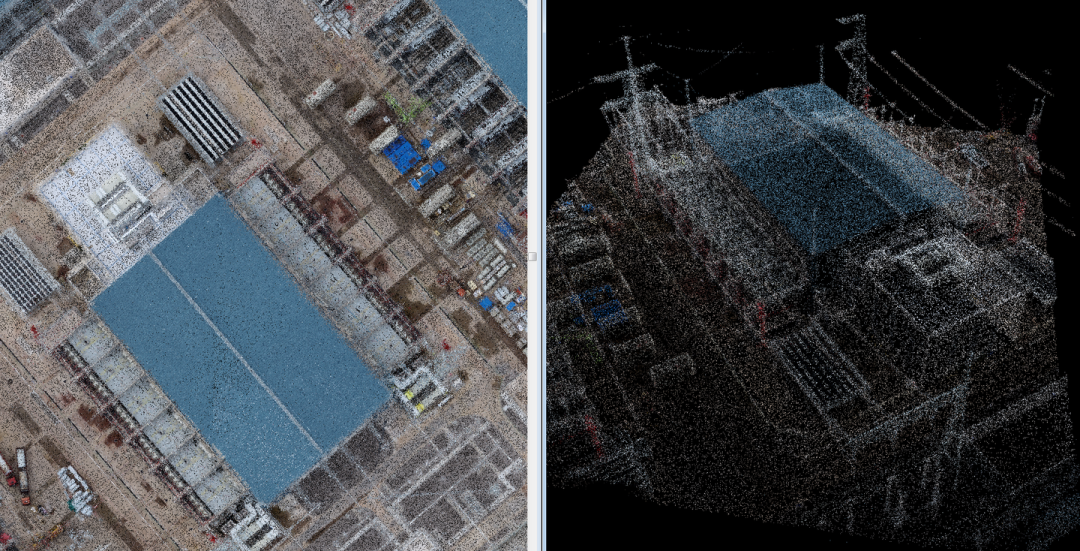
倾斜摄影是通过在同一飞行平台上搭载多台传感器(通常五镜头),同时从垂直、前视、后视、左视、右视五个角度采集影像,结合空中三角测量和密集匹配算法,生成具有真实纹理的三维网格模型。其核心是“以二维影像反推三维结构”。

优势
真实纹理还原:模型表面直接映射航拍影像,视觉真实感强,尤其适合大范围城市级展示。
自动化程度高:从影像采集到模型生成,流程标准化,人工干预少,适合大面积快速建模。
相对成本适中:相比激光雷达,硬件成本较低,且数据采集效率高(单架次可覆盖数十平方公里)。
劣势
几何精度有限:依赖影像特征匹配,在弱纹理区域(水面、雪地、沙地)或重复纹理区域(大面积屋顶、玻璃幕墙)容易出现破洞、拉花或扭曲。
数据量巨大:原始影像及生成的三角网模型体量庞大,轻量化处理困难,对存储和渲染性能要求高。
无法穿透植被:树冠下的地形、建筑立面被遮挡部分无法重建,导致模型空洞或悬空。
缺乏语义信息:模型仅为几何+纹理,不含构件属性、层级结构等业务信息。
适用场景

城市级实景三维(数字城市、智慧城市底板),大规模地形测绘、地质灾害调查,文旅景区的宏观展示(如古建筑群、自然风光)。
不适用场景
精细化设施管理(需要厘米级精度的工业设备、管线),植被密集区域的地下或地面细节重建,需要构件级属性查询和业务逻辑绑定的BIM应用。

激光点云
激光点云是通过激光雷达(LiDAR)主动发射激光束,测量回波时间或相位差,直接获取物体表面高精度三维坐标(X,Y,Z),并可附加回波强度或RGB颜色。点云数据本质是离散点的集合,不包含拓扑连接关系。
优势
几何精度极高:绝对精度可达厘米级甚至毫米级(地面/车载LiDAR),不受光照和纹理影响。
穿透性强:多回波技术可穿透植被冠层,获取地表真实高程(如树下的地面、林下地形)。
直接获取结构信息:无遮挡情况下,可精确捕捉物体边缘、棱角、细小构件(如管线支架、桥梁伸缩缝)。
支持逆向建模:点云可拟合出CAD/BIM模型,用于工程验收、改扩建测量。
劣势
缺乏纹理:原始点云仅含几何信息,颜色信息需额外配准影像,视觉真实感差。
数据稀疏且噪点多:远距离扫描点云密度下降,且易受镜面反射、多路径效应影响产生噪点。
处理流程复杂:去噪、分类、分割、建模等环节依赖专业软件和人工干预。
成本较高:高精度机载/车载LiDAR设备昂贵,数据采集和处理周期较长。
适用场景

高精度地形测绘、地质灾害监测,电力巡线、铁路/公路断面的精细测量,古建筑、工业设施的逆向建模与变形监测,植被覆盖区域的数字高程模型(DEM)生产。
不适用场景
需要逼真实时渲染的文旅展示(除非额外贴图),大面积城市级快速建模(效率低于倾斜摄影),需要语义和业务属性的全生命周期管理。

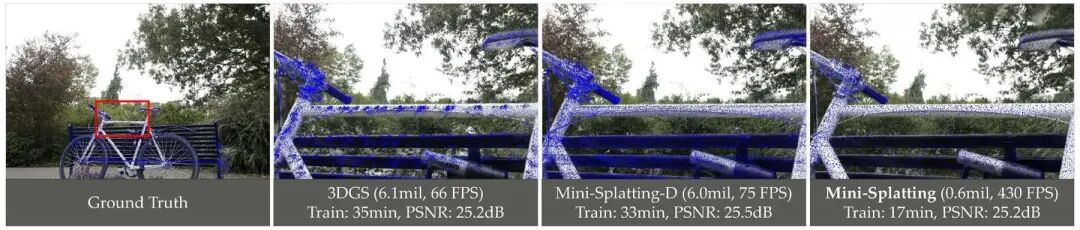
3D高斯(3D Gaussian Splatting)
3D高斯是一种新兴的三维场景表示与实时渲染技术。它将场景表示为大量三维高斯椭球体的集合,每个高斯体携带位置、颜色、透明度、旋转和缩放等属性。通过差分渲染优化,从稀疏影像集中快速重建,并支持实时渲染。
优势
极高渲染效率:中端GPU(RTX 3060)可达到38-60 FPS,远超NeRF和倾斜摄影。
视觉真实感强:能捕捉亚毫米级细节和复杂光学效应(如镜面反射、半透明材质、体积光)。
重建速度快:百平米场景仅需15-30分钟,适合快速响应。
显式表示,可编辑:高斯体是离散基元,支持裁剪、移动、颜色调整等操作。
劣势
模型体量较大:百万级高斯体场景文件可达数百MB至数GB,传输和加载压力大。
缺乏结构化信息:与点云类似,仅为视觉数据,无几何拓扑和业务属性。
边缘精度有限:在锐利边缘、薄板结构处可能出现雾状或毛边效果。
大场景管理复杂:需配合LOD或分块技术,否则内存占用爆炸。
适用场景
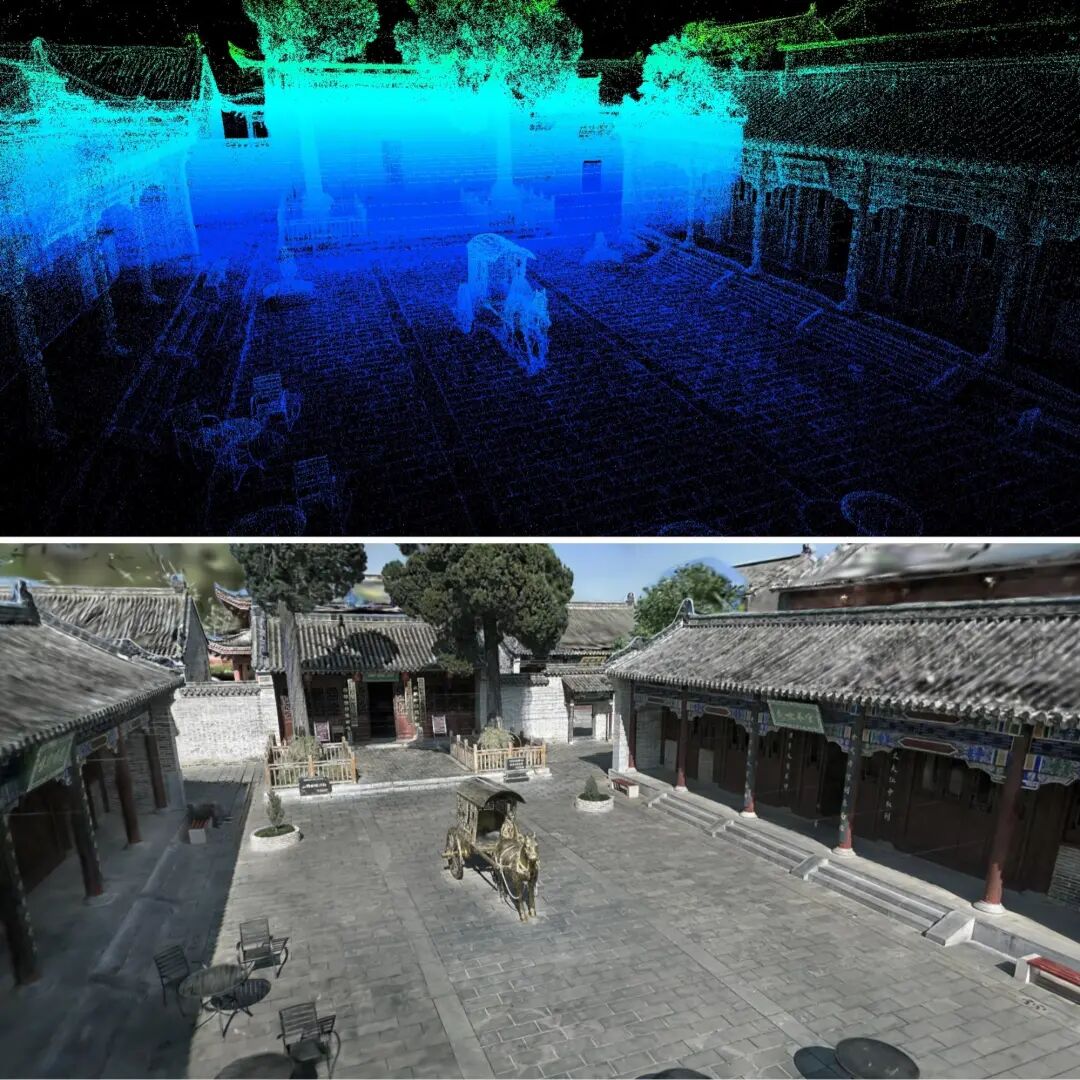
博物馆文物的高保真数字化展示,产品3D交互式说明书、电商虚拟展示,影视级虚拟拍摄的背景资产,快速生成数字孪生场景的“视觉底板”。
不适用场景
需要精确几何测量和工程分析(如结构计算、碰撞检测),需要构件级业务属性绑定的运维管理系统,超大规模城市级实时渲染(目前仍需优化)。

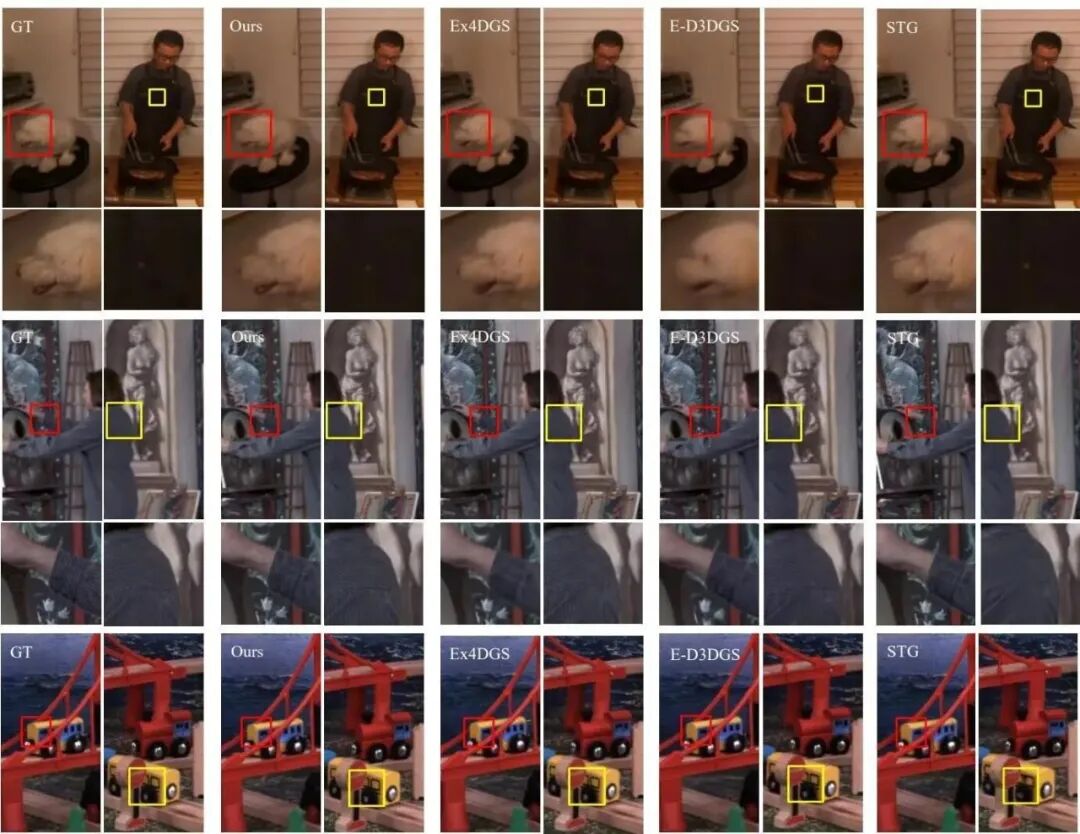
4D高斯(动态高斯泼溅)
4D高斯是在3DGS基础上引入时间维度,用于表示动态场景。通常通过多视角视频序列训练,学习高斯体随时间的形变、位移或属性变化,从而重建并实时渲染动态物体或环境(如飘动的旗帜、行走的人群、流动的水体)。
优势
动态真实性:能够还原时空连续的动态变化,而非逐帧静态模型。
支持时间轴交互:用户可暂停、快进、回溯动态过程,用于事件复盘或模拟推演。
数据驱动:从真实视频中学习,无需手动动画制作。
劣势
技术极不成熟:算法仍在快速迭代,稳定性和泛化性差,训练时间长。
数据采集要求高:需要同步、标定的多视角视频,且场景覆盖区域有限。
资源消耗巨大:4D高斯体数量远超静态3DGS,内存和计算负担成倍增加。
商业应用极少:目前主要停留在学术论文和Demo阶段,工业化落地案例罕见。
适用场景
体育赛事、演出活动的动态数字孪生,军事仿真中的爆炸、烟雾动态特效,科研机构的行为分析与运动捕捉。
不适用场景
任何对精度和稳定性有刚性要求的工程应用,需要长期运维和二次开发的数字孪生项目,预算有限的商业项目。

BIM(建筑信息模型)
BIM不是一种单纯的建模技术,而是一种贯穿建筑物全生命期的信息管理方法论。其“模型”是由参数化构件(墙、梁、板、柱、管道、设备等)组成的结构化数据库,每个构件携带几何尺寸、材质、型号、成本、性能参数、维护周期等丰富语义。

优势
语义与几何并重:BIM模型“知其然也知其所以然”,支持工程量统计、碰撞检查、性能分析(能耗、采光、疏散)等。
全生命周期一致性:设计、施工、运维阶段使用同一模型,避免信息断裂。
行业标准成熟:IFC、Revit系列等格式和交换标准已被广泛接受。
支持参数化驱动:修改设计参数,模型自动联动更新,效率极高。
劣势
建模成本高、周期长:需要专业工程师手工搭建,大型项目耗时数月。
真实纹理匮乏:BIM模型多为材质贴图,缺乏实景照片级真实感。
与GIS融合困难:坐标体系、语义粒度差异大,需大量人工对齐。
动态环境适应性差:无法直接表示植被、地形、老旧建筑等无BIM模型的现实物体。
适用场景
新建建筑/基础设施的设计、施工模拟、造价估算,设施运维管理(设备定位、维护记录、空间管理),需要合规审查、消防模拟、疏散演练的项目。
不适用场景
已建成且无BIM图纸的历史建筑、老旧厂区,需要高逼真视觉效果的非结构场景(自然景观、城市街景),快速响应需求(数天交付)的项目。
没有最好,只有最合适
要做城市级宏观展示,选倾斜摄影;
要精确测量和地形穿透,激光点云不可替代;
要快速生成高保真视觉模型且能实时交互,3D高斯是当前最具潜力的选择,但别指望用它做工程算量‘
4D高斯目前更适合学术研究和特定动态预览,慎用于生产项目。
BIM是工程管理的基石,但别指望它能给你“好看”的实景效果。
在实际数字孪生项目中,以上技术往往需要混合使用:BIM提供骨架与语义,激光点云或倾斜摄影提供现状底板,3D高斯补全高逼真细节。
选型前先问自己:我要解决的是“视觉”、“几何”还是“信息”问题? 答案不同,路径迥异。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐



 6
6 0
0- 0



 已为社区贡献15条内容
已为社区贡献15条内容

所有评论(0)