【目标检测系列·第 03 篇】YOLO 系列:从“你只看一次“到实时检测之王——速度与精度的十年博弈
【目标检测系列·第 03 篇】YOLO 系列:从"你只看一次"到实时检测之王——速度与精度的十年博弈
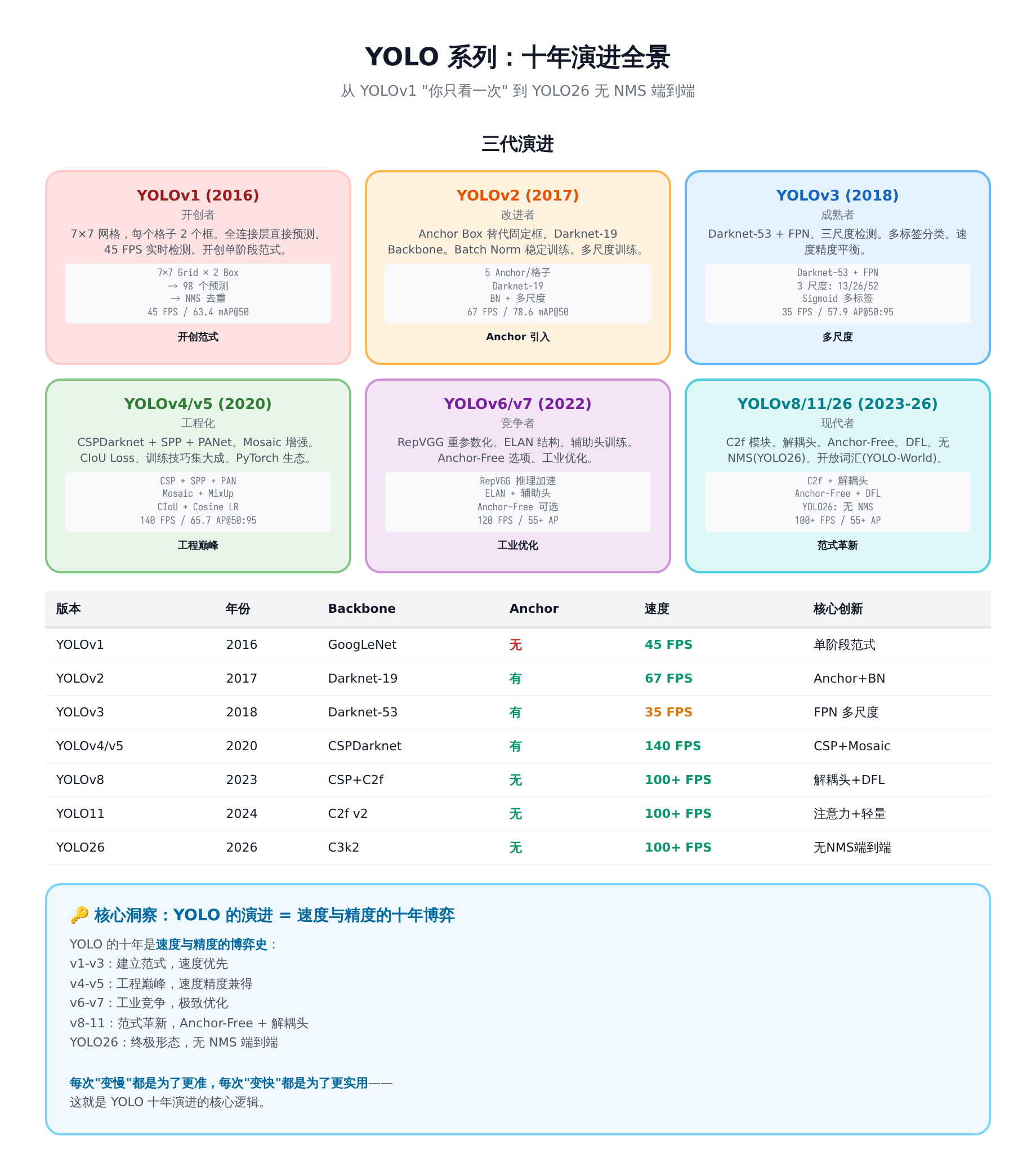
系列回顾:第 01 篇我们绘制了目标检测的全景图,第 02 篇我们拆解了两阶段检测器的精度之路。本篇进入目标检测最成功的家族:YOLO。2016 年,Redmon 等人提出 YOLO(You Only Look Once)——“你只看一次”,用单阶段检测彻底颠覆了两阶段范式。十年间,YOLO 从 v1 演进到 YOLO26,从 45 FPS 到 120+ FPS,从 Anchor-Based 到 Anchor-Free,从需要 NMS 到无 NMS 端到端——YOLO 始终是实时检测的代名词。YOLOv8 用 C2f+解耦头+DFL 成为生态之王,YOLOv9 用 PGI+GELAN 突破精度天花板,YOLO26 用完全无 NMS 实现终极形态,YOLO-World 用 CLIP 实现开放词汇检测。今天,我们从 YOLO 的十年演进、核心架构到现代 YOLO 全家桶选型,彻底拆解实时检测之王。
📑 文章目录
🚀 一、十年演进:从 YOLOv1 到 YOLO26
1.1 开创者:YOLOv1(2016)——“你只看一次”
YOLOv1 的核心思想极其大胆:将目标检测视为回归问题——输入图像,直接输出所有边界框和类别概率。没有区域提议,没有候选区域,没有两阶段——“你只看一次”。
工作方式:将图像划分为 S×S 网格(7×7),每个网格预测 B 个边界框(2个)和 C 个类别概率(20类)。每个边界框预测 5 个值(x, y, w, h, confidence)。最终输出 7×7×(2×5+20) = 1470 维张量。
三大贡献:开创了单阶段检测范式(速度从 0.3s/图提升到 45 FPS)、将检测视为端到端回归问题(极简架构)、证明了"快"和"准"不必矛盾。
致命缺陷:每个网格只预测 2 个框——密集目标场景严重漏检;对宽高比变化敏感(只学了 1 种先验);定位精度不如两阶段(mAP 63.4% vs Faster R-CNN 73.2% on VOC07)。
1.2 锚点革命:YOLOv2/YOLO9000(2017)
YOLOv2 的核心改进:引入 Anchor 机制。从 YOLOv1 的"直接预测绝对位置"变为"预测相对 Anchor 的偏移量"——这是 Faster R-CNN 的核心思想,YOLOv2 将其引入单阶段检测。
关键改进:Batch Normalization(所有卷积层加 BN,mAP +2%)、高分辨率分类器(先 448×448 微调分类,再检测,mAP +4%)、Anchor(k-means 聚类出 5 种先验框,召回率 +7%)、多尺度训练(每 10 批随机切换 320-608 分辨率)、Darknet-19 骨干(19 层,比 VGG 快 3x)。
YOLO9000 进一步提出联合训练:用检测数据(COCO 80 类)+ 分类数据(ImageNet 9000 类)同时训练,实现 9418 类检测——这是"开放世界检测"的早期尝试。
1.3 多尺度突破:YOLOv3(2018)
YOLOv3 的核心改进:FPN 多尺度检测。在三个不同尺度的特征图上分别检测——13×13(大目标)、26×26(中目标)、52×52(小目标)。每个位置预测 3 个 Anchor,共 9 种先验框。
Darknet-53 骨干:53 层残差网络,引入残差连接,比 Darknet-19 更深更强。在 ImageNet 上与 ResNet-101 精度相当,但速度快 1.5x。
多标签分类:用独立逻辑分类器替代 Softmax——一个目标可以属于多个类别(如"女人"和"人")。这在多标签场景中更合理。
YOLOv3 在 COCO 上达到 33.0 mAP@50:95——首次在精度上接近两阶段检测器,同时保持 35 FPS 的实时速度。
1.4 工程巅峰:YOLOv4/v5(2020)
YOLOv4 和 YOLOv5 几乎同时发布,代表了 YOLO 工程化的巅峰。
YOLOv4(Bochkovskiy):CSPDarknet53 骨干(跨阶段部分连接,减少计算量)、SPP 模块(空间金字塔池化,增大感受野)、PANet 颈部(路径聚合网络,比 FPN 更好的多尺度融合)、Mosaic 数据增强(4 张图拼接,丰富背景+小目标)、CIoU Loss(考虑中心距离+宽高比+重叠度)、CBAM 注意力(可选)。
YOLOv5(Ultralytics/Jocher):与 YOLOv4 架构几乎相同,但工程实现远超 v4——PyTorch 原生(v4 用 Darknet)、一键导出 ONNX/TensorRT/CoreML、自动锚框计算、超参数进化、丰富的数据增强管道。YOLOv5 成为工业部署的事实标准。
YOLOv4/v5 在 COCO 上达到 43-45 mAP@50:95,速度 140+ FPS——速度精度兼得。
1.5 工业竞争:YOLOX/v6/v7(2021-2022)
这段时期出现了多个团队竞争 YOLO 命名:
YOLOX(Megvii/旷视):首个 Anchor-Free YOLO。解耦检测头(分类和回归分开)、SimOTA 标签分配(动态匹配)、强数据增强(Mosaic+MixUp)。YOLOX 证明了 Anchor-Free 在 YOLO 上可行。
YOLOv6(Meituan/美团):RepVGG 骨干(训练时多分支+推理时单分支)、解耦头、SIoU Loss。面向工业部署优化。
YOLOv7(WongKinYiu):E-ELAN 高效层聚合、模型重参数化、辅助头训练。在 5-160 FPS 范围内精度速度最优。
1.6 范式革新:YOLOv8/9/10/11(2023-2024)
YOLOv8(Ultralytics):C2f 模块(CSP 改进版,更高效的特征融合)、解耦 Anchor-Free 头(分类和回归完全分离)、DFL 分布焦点损失(边界框回归建模为概率分布)、Mosaic+CloseMosaic 训练策略。YOLOv8 成为生态最完善的现代 YOLO——支持检测/分割/姿态估计/跟踪/分类五大任务。
YOLOv9:PGI 可编程梯度信息(解决深层网络信息丢失问题)、GELAN 广义高效层聚合(比 ELAN 更灵活)。YOLOv9 在 COCO 上达到 55.6 mAP——单阶段检测器的精度新高。
YOLOv10:一致双重分配 NMS-Free。训练时用一对多分配(丰富监督信号),推理时用一对一分配(无需 NMS)。YOLOv10 是首个无 NMS 的 YOLO——端到端部署。
YOLO11(Ultralytics):C2f v2(更高效的梯度流)、PSA 部分自注意力(选择性加入注意力机制)、C3k2 模块(更轻量的跨阶段连接)。YOLO11 是 Ultralytics 的最新旗舰。
1.7 终极形态:YOLO26(2026)
YOLO26 是 Ultralytics 的终极形态:完全无 NMS 端到端检测。C3k2 新型骨干网络,INT8 量化优化边缘部署,120+ FPS 实时推理。YOLO26 代表了 YOLO 的终极目标——快、准、简。
🔧 二、核心架构与创新:Backbone·Neck·Head + 六大创新

2.1 三段式架构:Backbone → Neck → Head
现代 YOLO 的架构是清晰的三段式:
Backbone(骨干网络):提取多尺度特征。从 Darknet-19 → Darknet-53 → CSPDarknet → C2f → C3k2,骨干网络的演进方向是"更高效的特征提取"。CSP(Cross Stage Partial)的核心思想:将特征图分为两部分,一部分正常计算,一部分跨阶段连接——减少计算量的同时保持梯度流。
Neck(颈部网络):融合多尺度特征。FPN(自顶向下)+ PAN(自底向上)是现代 YOLO 的标配。FPN 将高层语义信息传递到低层,PAN 将低层细节信息传递到高层——双向融合确保每个尺度都有丰富的语义和细节信息。
Head(检测头):输出检测结果。从耦合头(分类+回归共享参数)到解耦头(分类+回归独立参数),从 Anchor-Based(预测偏移量)到 Anchor-Free(直接预测位置),从需要 NMS 到无 NMS——检测头的演进方向是"更简洁的范式"。
2.2 六大核心创新
Anchor-Free(v8+)。YOLOv8 彻底去掉了 Anchor——不再需要预设参考框,直接预测中心点和宽高。好处:简化设计(无需调 Anchor)、泛化更好(不同数据集无需重新聚类)、训练更稳定。实现方式:每个网格点直接预测 4 个值(x_offset, y_offset, w, h),用 DFL 建模边界框分布。
解耦头(v8+)。传统 YOLO 的分类和回归共享卷积层——但分类关注"是什么"(语义特征),回归关注"在哪"(空间特征),两者需要不同的特征。解耦头将分类和回归分开:分类分支用 3×3 卷积 + 1×1 卷积,回归分支用 3×3 卷积 + 1×1 卷积 + DFL。解耦头带来 1-2 mAP 的提升。
Mosaic 数据增强(v4+)。随机选取 4 张图拼接成 1 张——丰富背景(4 倍背景多样性)、增加小目标(4 张图中的小目标被保留)、减少 Batch Size 需求(1 张图 = 4 张图的信息)。Mosaic 是 YOLO 训练中最有效的数据增强策略,带来 2-3 mAP 的提升。
DFL 分布焦点损失(v8+)。传统边界框回归直接预测偏移量——但模糊边界的定位不确定。DFL 将边界框回归建模为离散概率分布:预测每个位置的概率分布,取期望作为最终预测。DFL 让模型对模糊边界更鲁棒,带来 0.5-1 mAP 的提升。
C2f 模块(v8+)。C2f 是 CSP 的改进版——更高效的梯度流。CSP 将特征分为两部分,C2f 进一步优化了分流比例和连接方式,在保持精度的同时减少计算量。C2f 是 YOLOv8 速度提升的关键。
无 NMS(v10/YOLO26)。NMS 是 YOLO 部署的痛点——后处理耗时、超参敏感、不可微。YOLOv10 用一致双重分配解决:训练时一对多(丰富监督),推理时一对一(无需 NMS)。YOLO26 进一步优化,实现完全无 NMS 端到端检测。
📊 三、现代 YOLO 全家桶与选型指南

3.1 六大现代 YOLO 对比
YOLOv8(2023):生态之王。C2f + 解耦头 + Anchor-Free + DFL。最广泛使用的现代 YOLO,Ultralytics 生态最完善,支持检测/分割/姿态/跟踪/分类五大任务。mAP 53.9(X),速度 100+ FPS。
YOLOv9(2024):精度突破。PGI + GELAN。解决深层网络信息丢失,单阶段精度新高。mAP 55.6(X),速度 70 FPS。
YOLOv10(2024):无 NMS。一致双重分配,端到端部署。mAP 54.4(X),速度 100+ FPS。
YOLO11(2024):最新旗舰。C2f v2 + PSA 注意力 + C3k2。速度精度新平衡,多任务统一。mAP 55+,速度 100+ FPS。
YOLO26(2026):终极形态。完全无 NMS,C3k2 骨干,边缘优化。mAP 55+,速度 120+ FPS。
YOLO-World(2024):开放世界。CLIP 文本编码器,任意类别零样本检测。速度+开放的融合。
3.2 选型指南
通用项目首选 YOLOv8:生态最完善,文档最全,社区最大。如果你不确定选哪个,选 v8 不会错。
精度至上选 YOLOv9:mAP 最高,适合对精度要求极高的场景(医疗、遥感)。但速度较慢。
生产部署选 YOLO26:无 NMS 端到端,部署最简单,边缘设备优化。适合工业部署。
任意类别选 YOLO-World:零样本检测,无需重训练。适合类别不固定或频繁变化的场景。
最新最强选 YOLO11:综合最优,速度精度平衡最好。适合追求最新技术的团队。
📊 全文速查表
十年演进
| 版本 | 年份 | Backbone | Anchor | 速度 | 核心创新 |
|---|---|---|---|---|---|
| YOLOv1 | 2016 | GoogLeNet | 无 | 45 FPS | 单阶段范式 |
| YOLOv2 | 2017 | Darknet-19 | 有 | 67 FPS | Anchor+BN |
| YOLOv3 | 2018 | Darknet-53 | 有 | 35 FPS | FPN 多尺度 |
| YOLOv4/v5 | 2020 | CSPDarknet | 有 | 140 FPS | CSP+Mosaic |
| YOLOv8 | 2023 | CSP+C2f | 无 | 100+ FPS | 解耦头+DFL |
| YOLO11 | 2024 | C2f v2 | 无 | 100+ FPS | 注意力+轻量 |
| YOLO26 | 2026 | C3k2 | 无 | 120+ FPS | 无NMS端到端 |
六大核心创新
| 创新 | 引入版本 | 解决的问题 | 效果 |
|---|---|---|---|
| Anchor-Free | v8 | Anchor 设计复杂 | 简化+泛化 |
| 解耦头 | v8 | 分类回归互相干扰 | +1-2 mAP |
| Mosaic | v4 | 小目标+背景少 | +2-3 mAP |
| DFL | v8 | 模糊边界定位差 | +0.5-1 mAP |
| C2f | v8 | CSP 计算冗余 | 速度+精度 |
| 无NMS | v10/YOLO26 | NMS 后处理瓶颈 | 端到端 |
一句话总结
YOLO 的十年是速度与精度的博弈史:YOLOv1(2016)开创单阶段范式"你只看一次"45FPS→YOLOv2 引入 Anchor+BN 67FPS→YOLOv3 FPN 多尺度 35FPS→YOLOv4/v5 CSP+Mosaic 工程巅峰 140FPS→YOLOv8 C2f+解耦头+Anchor-Free+DFL 生态之王→YOLOv9 PGI+GELAN 精度突破 55.6mAP→YOLOv10 无NMS 端到端→YOLO11 注意力+轻量最新旗舰→YOLO26 完全无NMS终极形态 120+FPS。核心架构三段式:Backbone(CSPDarknet→C2f→C3k2)+ Neck(FPN+PAN)+ Head(耦合→解耦,Anchor→Anchor-Free,NMS→无NMS)。六大核心创新:Anchor-Free(简化范式)、解耦头(+1-2mAP)、Mosaic(+2-3mAP)、DFL(+0.5-1mAP)、C2f(速度+精度)、无NMS(端到端)。现代 YOLO 三极分化:速度极(YOLO26)、精度极(YOLOv9)、开放极(YOLO-World)。选型指南:通用→v8,精度→v9,部署→YOLO26,开放→YOLO-World,最新→YOLO11。YOLO 的创新 = 简化范式 + 增强训练——范式简化让 YOLO 更通用,训练增强让 YOLO 更精确,两条线并行推进就是 YOLO 持续进化的秘诀。
参考链接:
- YOLOv1 (Redmon et al., 2016)
- YOLOv2 (Redmon & Farhadi, 2017)
- YOLOv3 (Redmon & Farhadi, 2018)
- YOLOv4 (Bochkovskiy et al., 2020)
- YOLOv8 (Ultralytics, 2023)
- YOLOv9 (Wang et al., 2024)
- YOLOv10 (Wang et al., 2024)
系列预告:第 04 篇将深入 Anchor-Free 与 DETR——从 FCOS/CenterNet 的无锚点革命到 DETR 的端到端范式,拆解目标检测的范式革新。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 0
0 0
0- 0



 已为社区贡献246条内容
已为社区贡献246条内容

所有评论(0)