【开源】基于STM32的无线姿态检测仪设计
项目说明
使用STM32为主要控制器,通过读取姿态传感器的原始数据,解算出姿态数据,并通过无线通信方式传给其他设备。
功能如下:
1、使用 mpu6050 获得 传感器原始数据。
2、可通过卡尔曼滤波、一阶滤波、Mahony解算3种算法解算出姿态数据。
3、使用 OLED 屏幕显示解算数据。
4、使用 ESP8266 连接 WIFI 通过 MQTT 实时上报检测数据。
5、可使用 MQTT 软件检测上报数据。
项目开源链接
本项目资料完全开源。资料包获取方式:
github : https://github.com/snqx-lqh/ProjectReleasePage
gitee(国内镜像) :https://gitee.com/snqx-lqh/ProjectOpenSourceReleasePage
项目属于 32 的编号 B006 ,在发布页中,找到对应项目获取方式。
硬件设计
硬件设计如图所示。
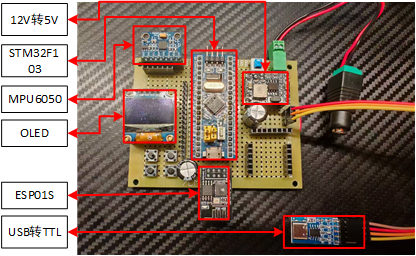
实际接线如下:
MPU6050:
- SCL->PB6
- SDA->PB7
- INT->PB5
- VCC->3V3
- GND->GND
OLED:
- SCK->PB8
- SDA->PB9
- VCC->3V3
- GND->GND
ESP8266:
- 3V3->3V3
- GND->GND
- TX->PB11
- RX->PB10
USB转TTL:
- TX->PA10
- RX->PA9
- GND->GND
软件设计
软件设计包含驱动设计和具体功能设计。
驱动设计
MPU6050驱动
关于 MPU6050 ,初始化的时候,配置10ms数据采样,然后把中断信号打开。这样mpu6050的INT引脚就会每隔10ms产生一次引脚下降沿,我们可以用这个来判断陀螺仪数据是否准备好了。
mpu6050_set_rate(100); //10ms 1000/100 = 10MS
mpu6050_write_one_byte(MPU6050_ADDR,MPU_INT_EN_REG,0X01); //打开中断信号
mpu6050_write_one_byte(MPU6050_ADDR,MPU_USER_CTRL_REG,0X00);
mpu6050_write_one_byte(MPU6050_ADDR,MPU_FIFO_EN_REG,0X00);
mpu6050_write_one_byte(MPU6050_ADDR,MPU_INTBP_CFG_REG,0X9C); //中断信号配置
mpu6050_read_one_byte (MPU6050_ADDR,MPU_DEVICE_ID_REG,&res);
一般的数据读取都是直接读取原始值,但是我在读取原始值的基础上加了个陀螺仪初始化校准。校准函数在最开始mpu6050_init函数中调用,获得初始时刻的偏移。
void mpu_calibration()
{
int32_t sum_gx = 0, sum_gy = 0, sum_gz = 0;
int16_t gx, gy, gz;
for (int i = 0; i < 100; i++)
{
mpu6050_get_gyro(&gx, &gy, &gz);
sum_gx += gx;
sum_gy += gy;
sum_gz += gz;
mpu6050_delay_ms(10); // 稍微延时,确保数据稳定
}
gyro_offset[0] = sum_gx / 100;
gyro_offset[1] = sum_gy / 100;
gyro_offset[2] = sum_gz / 100;
}
然后在后续读取的时候就减去这一部分偏移。然后剩下的代码就和正点原子教程代码差不多了。
uint8_t mpu6050_get_gyro(int16_t *gx,int16_t *gy,int16_t *gz)
{
uint8_t buf[6],res;
if(gx == NULL || gy == NULL || gz == NULL)
return 2;
res=mpu6050_read_bytes(MPU6050_ADDR,MPU_GYRO_XOUTH_REG,6,buf);
if(res==0)
{
*gx=(((uint16_t)buf[0]<<8)|buf[1]);
*gy=(((uint16_t)buf[2]<<8)|buf[3]);
*gz=(((uint16_t)buf[4]<<8)|buf[5]);
*gx -= gyro_offset[0];
*gy -= gyro_offset[1];
*gz -= gyro_offset[2];
}
return res;
}
ESP01S驱动
ESP01S使用的固件是 (1471)ESP8266-AT-1M.bin。这个在我的开源文件中包含。
关于此设备驱动,最重要的是怎么处理它返回值的不定长以及不是及时响应,一个命令可能会隔段时间才会回应,还不连续。所以,我们使用一个环形缓冲区把接收到的内容先暂存,然后再处理。
环形缓冲区这里使用了 RT-Thread 中的环形缓冲区思想,但是只保留了一些常用函数。环形缓冲区可以当作被两个索引管理的数组。我们只谈使用。在串口接收中断中,我们将接收到的数值放到环形缓冲区中,在主任务中进行提取处理。
主要的接收处理如下:
void USART3_IRQHandler(void)
{
if (USART_GetITStatus(USART3, USART_IT_RXNE) != RESET)
{
uint8_t data = USART_ReceiveData(USART3);
ringbuffer_putchar(&esp01s_device.rx_rb, data); // 将数据放入环形缓冲区 esp01s_device.rx_rb 中
USART_ClearITPendingBit(USART3, USART_IT_RXNE);
}
}
esp01s_device 是一个管理 ESP01S 变量的结构体变量,rx_rb 就是里面定义的环形缓冲结构体。
然后在 主任务中,我的发送指令函数如下:
int esp_at_cmd(struct esp01s *esp, const char *cmd, const char *expect, uint16_t timeout_ms)
{
// 清空缓存(很重要)
int ret = 0;
ringbuffer_reset(&esp->rx_rb);
esp_send(cmd);
esp_send("\r\n");
ret = esp_wait_response(esp, expect, timeout_ms);
esp->resp_len = 0;
return ret;
}
int esp_wait_response(struct esp01s *dev, const char *expect, uint32_t timeout)
{
uint16_t delay_ms_counter = 0;
dev->resp_len = 0;
while (delay_ms_counter < timeout)
{
uint8_t ch;
if (ringbuffer_getchar(&dev->rx_rb, &ch) == 1)
{
// 保存数据
if (dev->resp_len < ESP_RESP_BUF_SIZE - 1)
{
dev->resp_buf[dev->resp_len++] = ch;
dev->resp_buf[dev->resp_len] = '\0';
}
// 判断成功
if (strstr((char *)dev->resp_buf, expect))
{
return 0;
}
// 判断错误
if (strstr((char *)dev->resp_buf, "ERROR"))
{
return -1;
}
} else {
// 没有数据,等待一段时间
delay_ms_counter++;
esp_delay_ms(1);
}
}
return -2; // 超时
}
发送数据完成后,就等待响应,响应就是把串口中断中环形缓冲区得到的值,一个个取出来存到数组中,然后再进行判断,比如判断是否接收到响应字符,是否接收到错误字符。
OLED驱动
OLED 就是使用的中景园电子的,只不过使用的我自己的 IIC 函数。
应用设计
应用设计首先是初始化。然后是while任务轮询,以及中断数据获取。
初始化
在初始化中,值得注意的就是 ESP01S 的初始化,其他驱动初始化比较一般。
我们的 ESP 01s 使用了 MQTT ,所以我们需要连接一些 MQTT 的配置。
首先是 ESP 复位,没什么好说的,只是需要切换到station模式,也就是使用 "AT+CWMODE=1" 步骤如下:
ret = esp_at_cmd(&esp01s_device, "AT+RST", "OK", 2000);
printf("AT+RESET resp: %s\n", esp01s_device.resp_buf);
if(ret != 0) while(1);
delay_ms(500);
ret = esp_at_cmd(&esp01s_device, "AT", "OK", 2000);
printf("AT resp: %s\n", esp01s_device.resp_buf);
if(ret != 0) while(1);
ret = esp_at_cmd(&esp01s_device, "AT+CWMODE=1", "OK", 2000);
printf("AT+CWMODE resp: %s\n", esp01s_device.resp_buf);
if(ret != 0) while(1);
然后是连接 WIFI。这是我的 WIFI 名 和 密码 。你需要替换成自己的。
ret = esp_at_cmd(&esp01s_device, "AT+CWJAP=\"CMCC-XJmL\",\"sR62HiPv\"", "OK", 5000);
printf("AT+CWJAP resp: %s\n", esp01s_device.resp_buf);
if(ret != 0) while(1);
然后是 MQTT 的处理,下面是常用指令:
AT+MQTTUSERCFG=0,1,"用户ID","账号","密码",0,0,""
# 设置MQTT连接所需要的的参数,包括用户ID(不为空)、
# 账号(admin)以及密码(public)
AT+MQTTCONN=0,"broker.emqx.io",1883,0
AT+MQTTPUB=0,"ESP8266/online","1",0,0
#发布一条topic为“ESP8266/online”,message为“1”的数据, #QOS设置为0
AT+MQTTSUB=0,"ESP8266/EMQX",0
#订阅一条topic为“ESP8266/EMQX”,QOS为0的数据
这里需要注意,需要先配置用户 ID ,不要使用 test 这种 ID 最好,因为我使用的gon公共测试服务器 broker.emqx.io,用 test 这个名字很可能连不上。
ret = esp_at_cmd(&esp01s_device, "AT+MQTTUSERCFG=0,1,\"user\",\"user\",\"123\",0,0,\"\"", "OK", 2000);
printf("AT+MQTTUSERCFG resp: %s\n", esp01s_device.resp_buf);
if(ret != 0) while(1);
ret = esp_at_cmd(&esp01s_device, "AT+MQTTCONN=0,\"broker.emqx.io\",1883,0", "OK", 5000);
printf("AT+MQTTCONN resp: %s\n", esp01s_device.resp_buf);
if(ret != 0) while(1);
中断数据获取
我在中断中读取了陀螺仪的原始参数,但是,我们最好不要在中断中计算,中断的原则应该是快进快出,我们在中断中获取到原始数据后,将其放进一个循环缓冲中,以待在轮询的时候把数据取出来计算,这样也不会丢数据。
由于中断是10ms一次,我在中断中还做了两个标志,一个是界面刷新,count % 10 == 0也就是100ms触发一次,mqtt发送数据标志,1S触发一次。
void EXTI9_5_IRQHandler(void)
{
if(EXTI_GetITStatus(EXTI_Line5)!= RESET)
{
//获得6050原始数据
count++;
if(count % 100 == 0){
pushMqttFlag = 1;
}
if(count % 10 == 0){
showUiFlag = 1;
}
mpu_sample_t sample;
mpu6050_get_gyro(&sample.gyro[0], &sample.gyro[1], &sample.gyro[2]);
mpu6050_get_acc(&sample.acc[0], &sample.acc[1], &sample.acc[2]);
mpu_sample_rb_put(&mpu_rb, &sample);
EXTI_ClearITPendingBit(EXTI_Line5);
}
}
while 循环
在任务循环中,首先查看数据缓冲区中是否有数据,有的话就把数据提出来做计算。
// 一次性处理所有积压的MPU数据
mpu_sample_t sample;
while (mpu_sample_rb_get(&mpu_rb, &sample) == 0)
{
//cal_with_kalman(sample);
//cal_with_folpf(sample);
cal_with_ahrs(sample);
}
然后是 1S 的时候进行MQTT上报。这里发送的是JSON字符串,把想要发送的数据整合到一条发送,方便处理。
为了通过 ESP01S 的 AT+MQTTPUB 命令发送 JSON 数据,需要处理 C 语言转义 → AT 指令转义 两层转换。
比如我们现在有一个目标发送格式
{"roll":"12.34","pitch":"56.78","yaw":"90.12"}
JSON 整体作为 AT+MQTTPUB 的第三个参数,参数内双引号和逗号必须用 \ 转义,写成\"和\,:
AT+MQTTPUB=0,"/topic","{\"roll\":\"12.34\"\,\"pitch\":\"56.78\"\,\"yaw\":\"90.12\"}",0,0
然后在 C 语言中,我们要把上面这条指令写成字符串,那么这个字符串中的双引号和\需要用 \ 转义,写成\"和\\,为什么C语言中不用再把,转义一遍,因为那只是AT+MQTTPUB中的转义要求,不是C的转义要求,C中我们的转义只要能获得上面的字符串就可以。就需要如此写入:
sprintf(mqtt_put_message,
"AT+MQTTPUB=0,\"/topic\",\"{\\\"roll\\\":\\\"12.34\\\"\\,\\\"pitch\\\":\\\"56.78\\\"\\,\\\"yaw\\\":\\\"90.12\\\"}\",0,0")
为了方便看,我做了换行,换行可以在换行头尾加上"表示续接字符串。 也就是下面这种状态了。
if(pushMqttFlag) // 1S 上报一次 MQTT 状态
{
pushMqttFlag = 0;
// 上报状态信息
sprintf(mqtt_put_message,
"AT+MQTTPUB=0,\"/user/mqtttest/angles\","
"\"{\\\"roll\\\":\\\"%.2f\\\""
"\\,\\\"pitch\\\":\\\"%.2f\\\""
"\\,\\\"yaw\\\":\\\"%.2f\\\"}\","
"0,0",
mpu6050_data.angleRoll, mpu6050_data.anglePitch, mpu6050_data.angleYaw);
esp_at_cmd(&esp01s_device, mqtt_put_message , "OK", 2000);
printf("AT+MQTTSUB resp: %s\n", esp01s_device.resp_buf);
}
所以上面这条信息,真的发送出去的时候就是如下(%.2f是实际值,这里我只是占位置),然后你把这个发送到ESP01S中后,他会再转义一遍有\的部分
AT+MQTTPUB=0,"/user/mqtttest/angles","{\"roll\":\"%.2f\"\,\"pitch\":\"%.2f\"\,\"yaw\":\"%.2f\"}",0,0
最后发送到服务器就是:
{"roll":"%.2f","pitch":"%.2f","yaw":"%.2f"}
然后是100ms UI 刷新。
if(showUiFlag) // 100MS 更新一次界面
{
showUiFlag = 0;
// 更新一次界面显示
OLED_Clear_Buffer(); //清除之前的缓存
sprintf((char*)oled_show_str,"MPU6050");
OLED_ShowString(24,0,oled_show_str,16,1);
sprintf((char*)oled_show_str,"Roll: %.2f",mpu6050_data.angleRoll);
OLED_ShowString(0,16,oled_show_str,16,1);
sprintf((char*)oled_show_str,"Pitch: %.2f",mpu6050_data.anglePitch);
OLED_ShowString(0,32,oled_show_str,16,1);
sprintf((char*)oled_show_str,"Yaw: %.2f",mpu6050_data.angleYaw);
OLED_ShowString(0,48,oled_show_str,16,1);
OLED_Refresh(); //更新
}
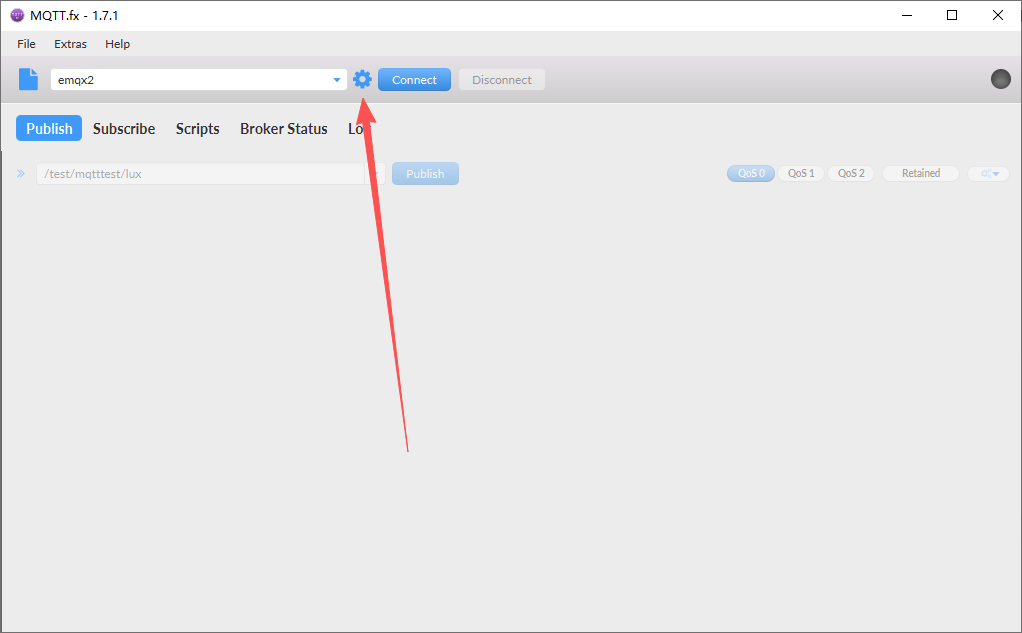
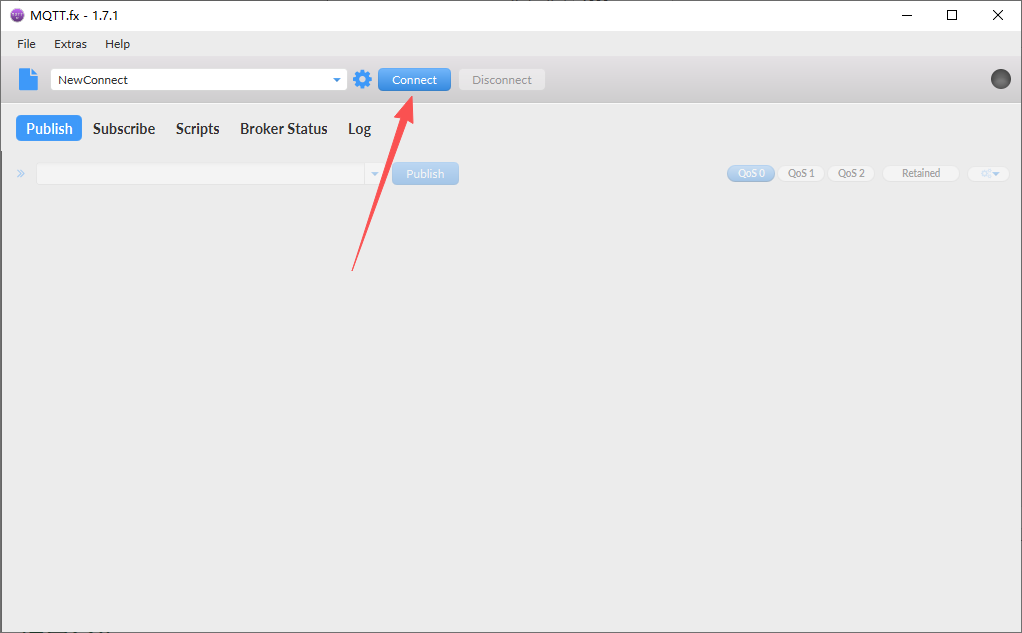
mqttfx 连接测试
我们上报的信息,想要快速查看是否真的上报成功,可以使用 mqttfx 工具进行查看。工具在我的开源文件中包含。
1、点击设置,准备创建一个连接。
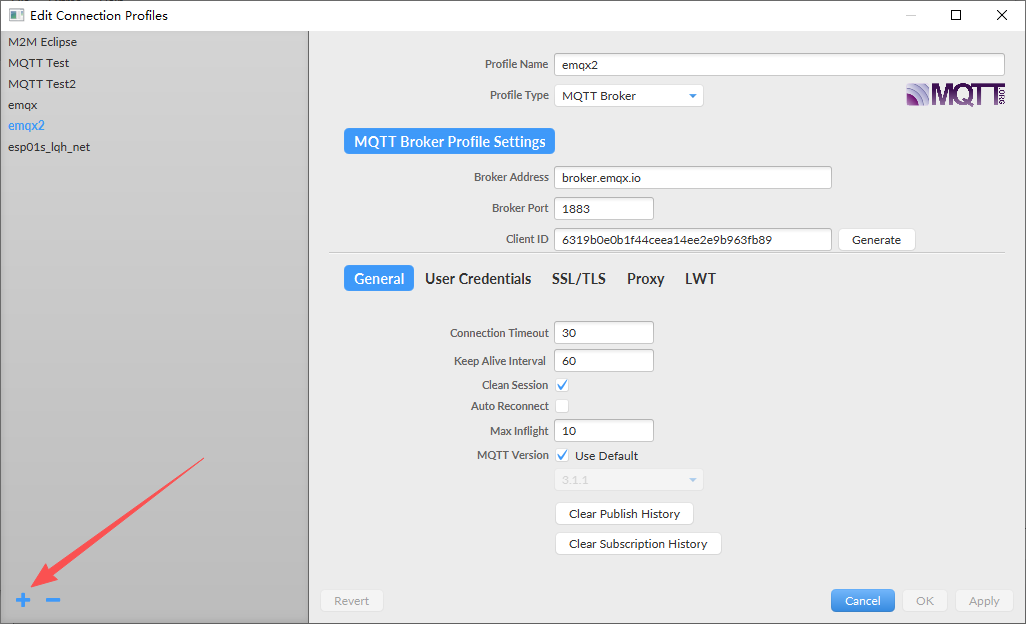
2、点击此处新建一个连接。
我把这个连接创建为 NewConnect 并且配置访问服务器。
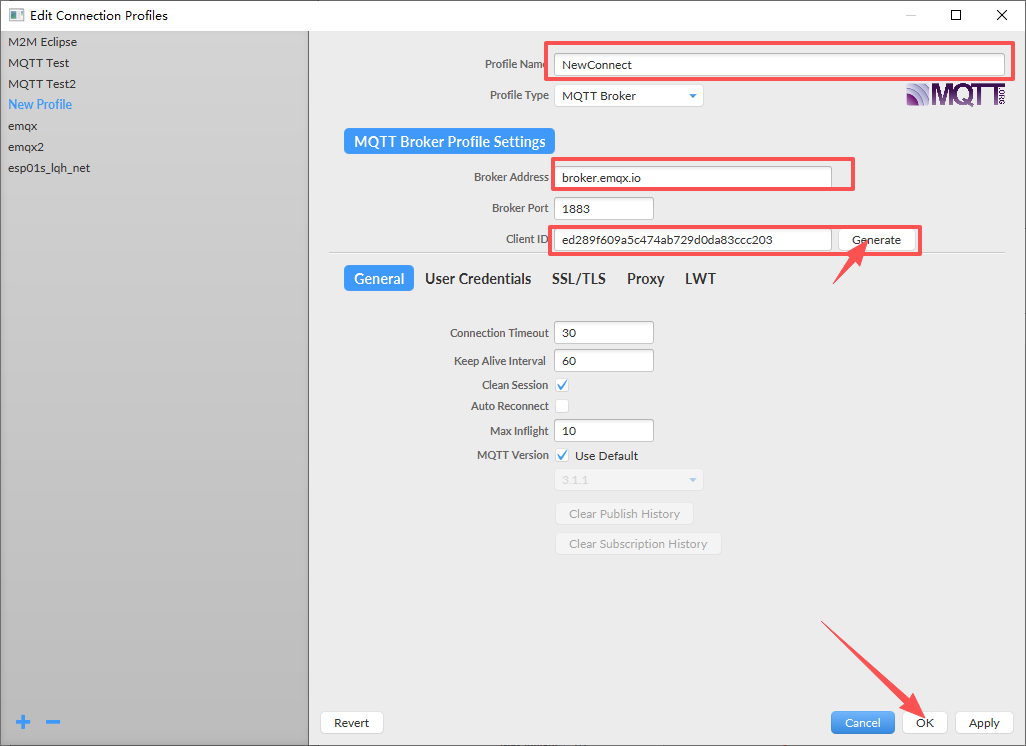
主页面点击连接即可。
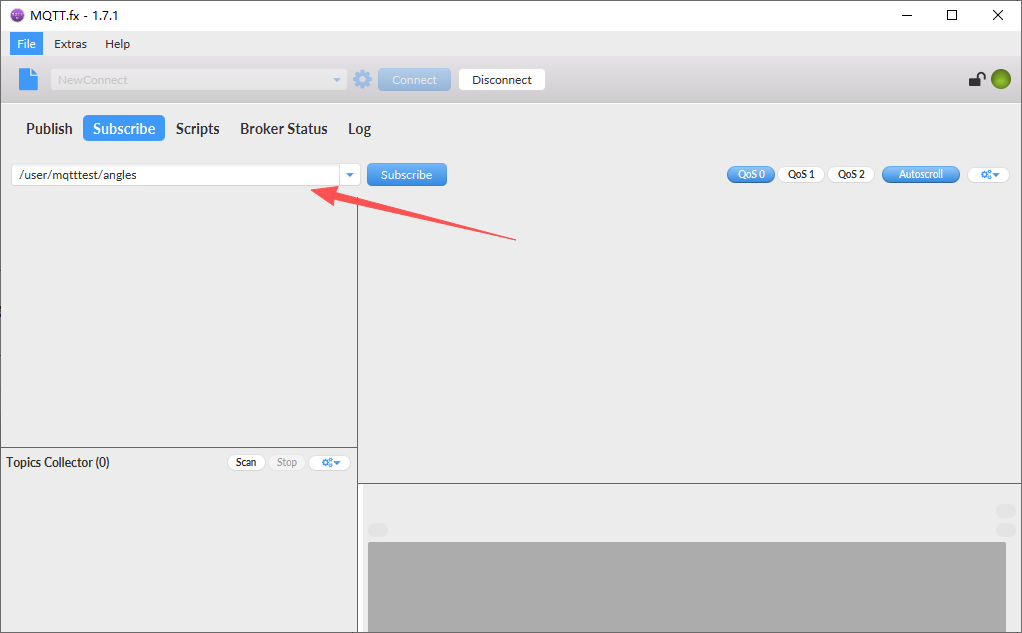
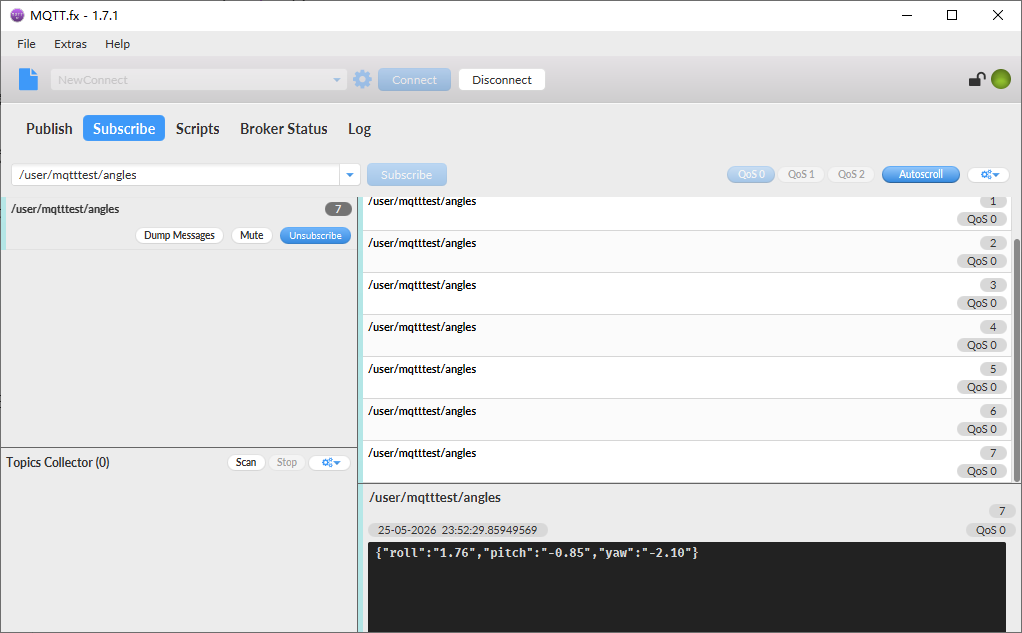
然后我们订阅一个主题,主题名自己输入,需要和代码中发布的主题一致。
便可以看到发布的消息了。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐



 11
11 0
0- 0



 已为社区贡献11条内容
已为社区贡献11条内容

所有评论(0)