S²CycleDiff:基于空间-光谱双向循环扩散的高光谱图像超分辨率方法 AAAI 2024
英文题目: S²CycleDiff: Spatial-Spectral-Bilateral Cycle-Diffusion Framework for Hyperspectral Image Super-resolution
中文题目: 基于空间-光谱双向循环扩散的高光谱图像超分辨率方法
会议: AAAI 2024
任务方向: 高光谱图像超分辨率 / 高光谱-多光谱图像融合
关键词: 高光谱图像超分辨率;高光谱-多光谱融合;扩散模型;循环扩散;空间-光谱双向建模;SGPD;DIB
一、研究背景
高光谱图像,Hyperspectral Image,简称 HSI,包含大量连续光谱波段,能够提供丰富的光谱信息。相比普通 RGB 图像或多光谱图像,高光谱图像可以更细致地反映地物的材料属性,因此广泛应用于城市规划、灾害监测、水资源管理、农业遥感等任务。
但是,高光谱成像系统通常存在一个天然矛盾:
高光谱分辨率⟺低空间分辨率
也就是说,高光谱图像虽然光谱信息丰富,但是空间细节往往不足。与之相对,多光谱图像,Multispectral Image,简称 MSI,通常具有更高空间分辨率,但波段数量较少,光谱信息不如 HSI 丰富。
因此,高光谱图像超分辨率,Hyperspectral Image Super-Resolution,简称 HISR,通常希望利用:
LrHSI 的光谱信息+HrMSI 的空间信息→HrHSI
其中:
表示低空间分辨率高光谱图像 LrHSI;
表示高空间分辨率多光谱图像 HrMSI;
表示目标高空间分辨率高光谱图像 HrHSI;
- 通常有
,
,
。
也就是本文的核心任务可以写成:
其中 是模型重建得到的高分辨率高光谱图像。
二、现有方法的问题
很多已有 HISR 方法直接学习从 LrHSI 和 HrMSI 到 HrHSI 的联合映射:
这种方法虽然直观,但是容易出现两个问题:
第一,空间细节注入不充分。
HrMSI 中包含丰富的空间纹理、边缘和结构信息,如果只是简单拼接或普通卷积融合,模型可能无法充分利用这些高频细节。
第二,光谱分布保持不好。
LrHSI 中包含完整的光谱响应信息,如果融合过程中空间信息注入过强,可能会破坏原有光谱曲线,导致光谱失真。
所以,本文的出发点可以概括为: 不仅要融合空间和光谱信息,还要分别保持空间一致性与光谱一致性。这也是 S²CycleDiff 设计“双向循环扩散”的主要原因。
三、创新点
本文主要有三个创新点。
1. 提出空间-光谱双向循环扩散框架 S²CycleDiff
论文不是简单地用一个网络直接从 回归
,而是设计了一个条件循环扩散框架,将超分辨率过程拆成两个互补分支: Spatial Branch+Spectral Branch
空间分支侧重恢复空间细节,光谱分支侧重保持光谱分布。两个分支通过循环扩散方式反复细化结果。
2. 设计条件循环扩散机制
在反向扩散过程中,模型分别学习空间超分辨率和光谱超分辨率的条件分布:
其中, 是空间分支在时间步
预测的干净 HrHSI,
是光谱分支在时间步
预测的干净 HrHSI。
3. 提出 SGPD 空间/光谱引导金字塔去噪模块
SGPD,全称 Spatial/Spectral Guided Pyramid Denoising,是条件扩散框架的核心模块。它通过多尺度金字塔结构和细节注入块 DIB,将 HrMSI 或 LrHSI 中的有效信息注入到去噪过程中。
直观理解就是: HrMSI 提供空间细节,LrHSI 提供光谱校正。
四、整体方法框架
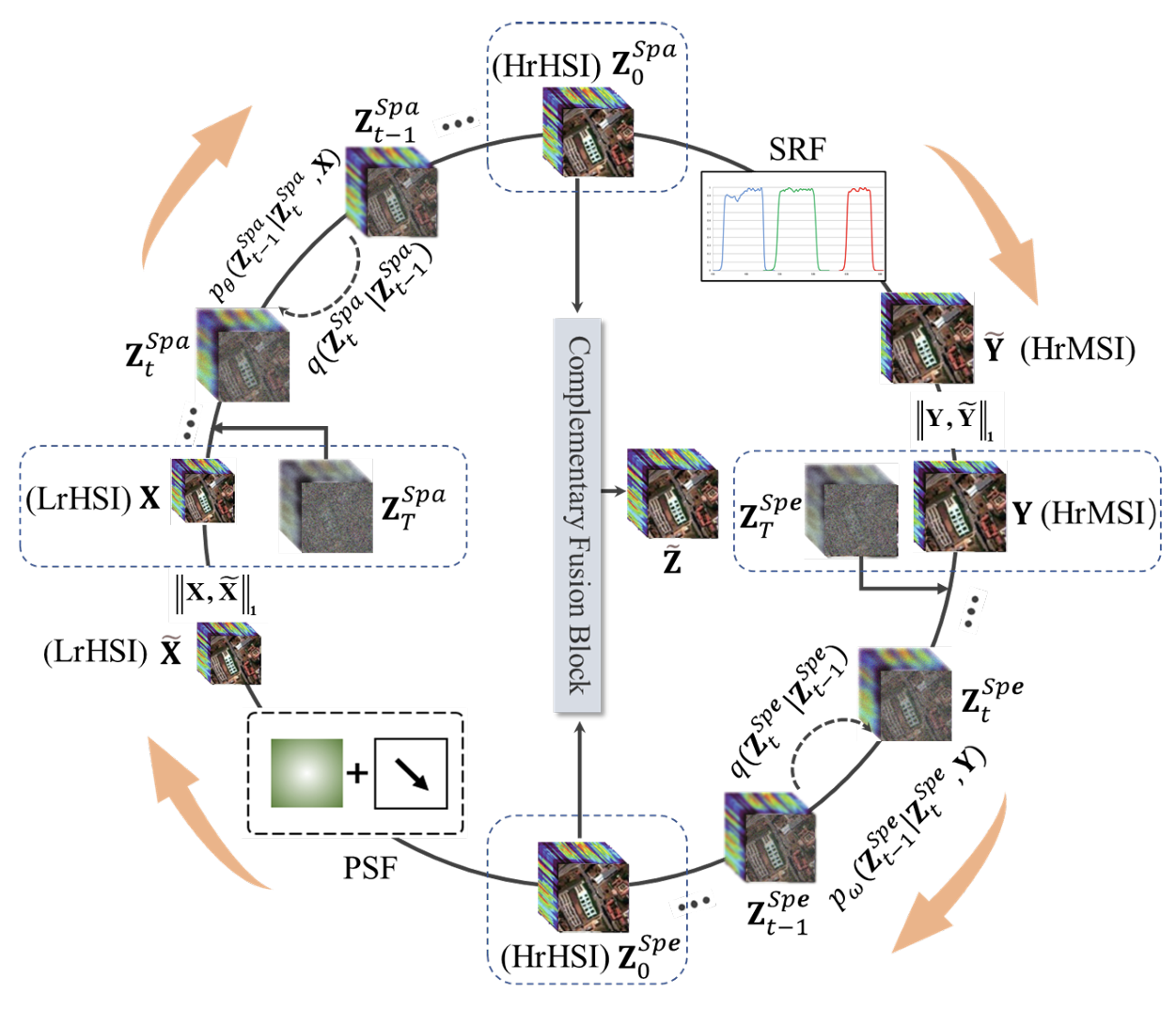
S²CycleDiff 的整体流程可以分为三个部分:
- 前向扩散过程;
- 反向条件循环扩散过程;
- 互补融合模块。
1. 前向扩散过程
给定干净的高分辨率高光谱图像 ,其中:
前向扩散过程不断向 中加入高斯噪声,最终得到接近标准高斯分布的
。
每一个时间步的前向扩散过程可以表示为:
其中, 是噪声调度参数,
是单位矩阵。通过重参数化技巧,可以直接由
得到任意时间步的
:
其中:
这个过程的作用是把真实图像逐渐扰动成噪声图像。扩散模型的反向过程则是学习如何一步步去噪。
五、反向条件循环扩散过程
反向扩散的目标是从噪声图像 逐步恢复出干净图像
。S²CycleDiff 的特别之处在于,它不是只用一个分支进行恢复,而是设计了空间分支和光谱分支。
1. 空间超分辨率分支
空间分支以 LrHSI 作为条件,以 HrMSI 作为引导,目标是恢复更清晰的空间细节:
这里可以理解为:
:当前时间步的带噪高光谱图像;
:低分辨率高光谱图像,提供光谱基础;
:高分辨率多光谱图像,提供空间纹理;
:空间分支网络。
空间分支的核心任务是: 利用 HrMSI 的空间结构,增强 HrHSI 的空间细节。
2. 光谱超分辨率分支
光谱分支以 HrMSI 作为条件,以 LrHSI 作为引导,目标是保持更准确的光谱分布:
这里 表示光谱分支网络。
光谱分支的核心任务是: 利用 LrHSI 的光谱信息,减少光谱失真。
3. 循环更新
在每一个时间步,两个分支都会预测当前的干净图像,然后根据扩散后验公式得到下一步输入。空间分支更新为:
光谱分支更新为:
直观来说,每一轮循环都在做两件事: 空间分支补细节,光谱分支校光谱。
这就是 S²CycleDiff 中 “Spatial-Spectral-Bilateral Cycle” 的含义。
六、核心模块:SGPD 空间/光谱引导金字塔去噪模块
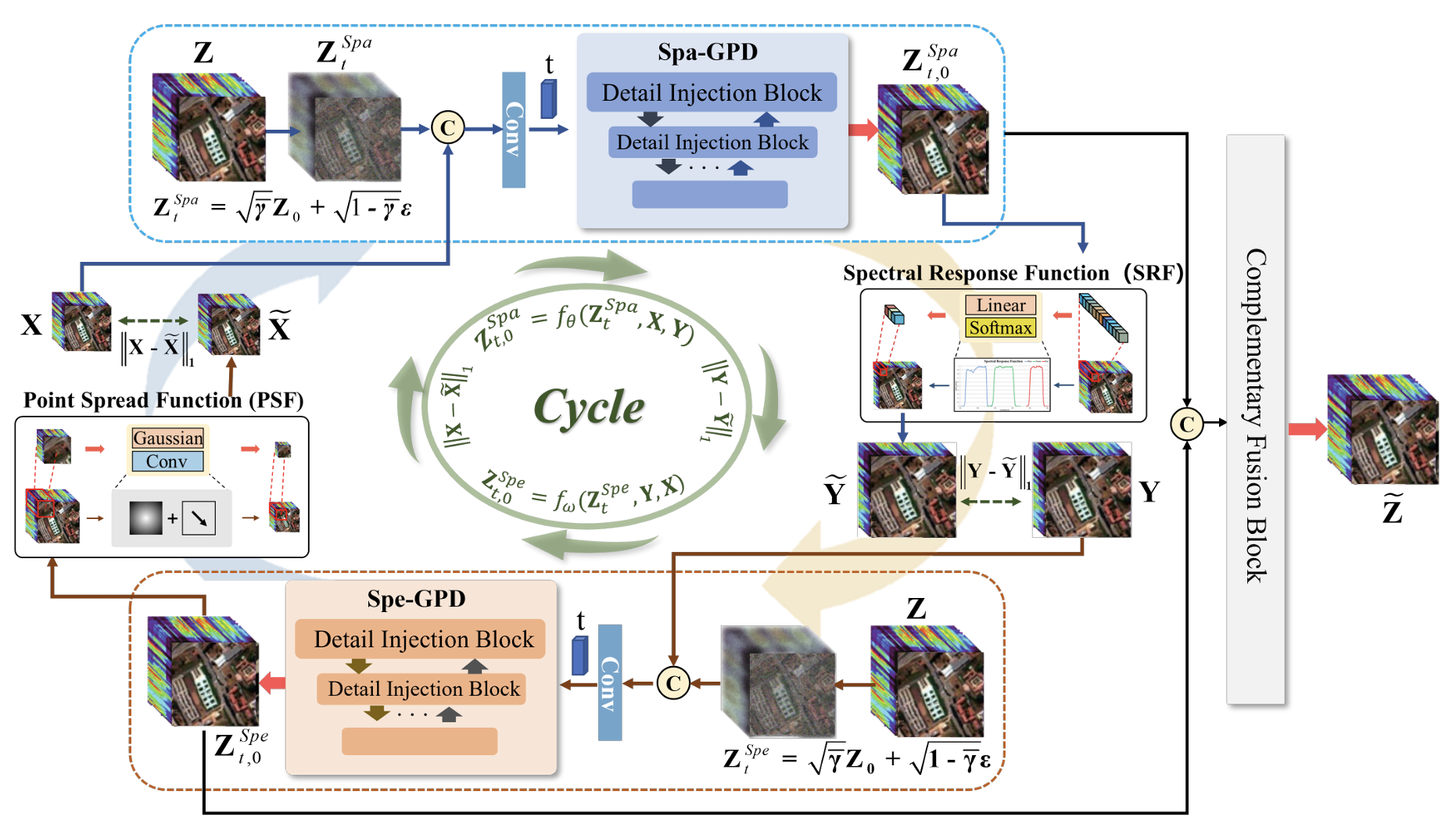
SGPD 是本文最关键的模块之一。它的作用是在扩散去噪过程中,把引导图像的信息有效注入进去。
对于空间分支,SGPD 可以写成:
进一步写为:
其中:
也就是说,空间分支先将当前噪声图像 和 LrHSI
进行卷积融合,然后再用 HrMSI
进行空间引导。
对于光谱分支,过程类似:
进一步写为:
其中:
因此,两个分支是对称的:
Spa-GPD:用 HrMSI 引导空间细节注入
Spe-GPD:用 LrHSI 引导光谱信息校正
七、DIB:细节注入块
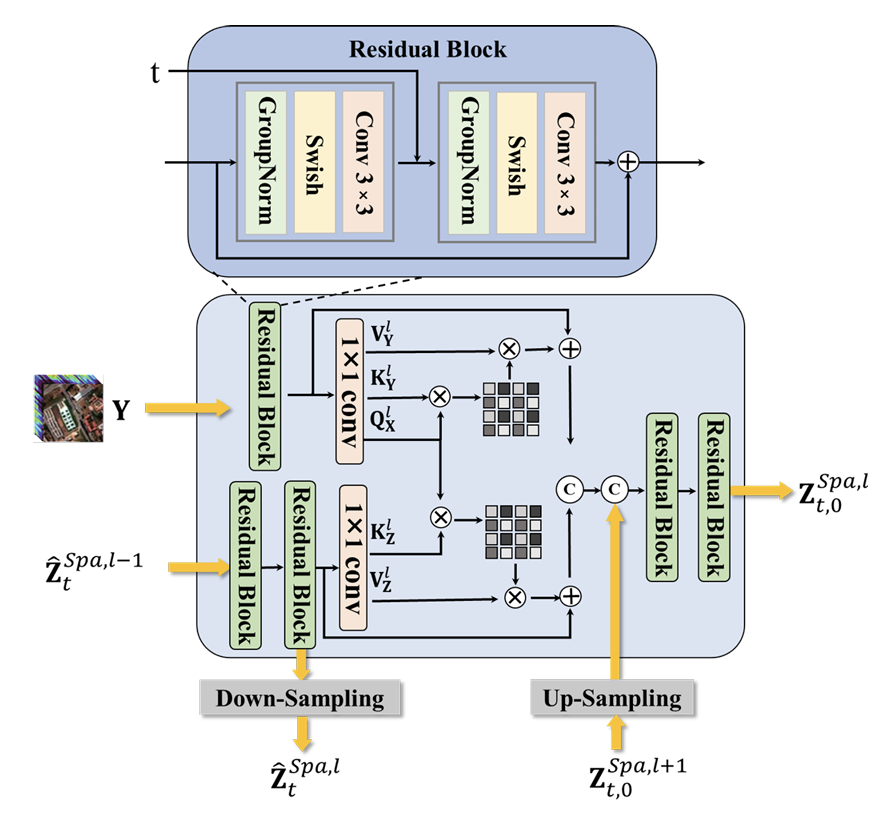
DIB,全称 Detail Injection Block,是 SGPD 中的基本单元。它主要用于在多尺度特征中注入引导图像的空间或光谱细节。
以空间分支为例,第 个 DIB 可以表示为:
其中:
表示上一层传来的中间特征;
表示下一层上采样回来的特征;
DIB 中使用了交叉注意力机制,将引导图像 的精细空间纹理注入到当前高光谱特征中。其核心可以理解为:
当前 HSI 特征作为待增强对象,HrMSI 作为空间细节来源。在光谱分支中,DIB 的结构是类似的,只是引导信息从 HrMSI 换成了 LrHSI,用于加强光谱一致性。
所以 DIB 的作用可以概括为:
不是简单拼接,而是在多尺度上通过注意力机制选择性注入有效细节。这个设计比普通 concat 更精细,也更适合高光谱图像这种空间-光谱耦合很强的数据。
八、互补融合模块 CFB
经过空间分支和光谱分支后,模型会得到两个候选的高分辨率高光谱结果:
二者各有侧重:
:空间结构更强;
:光谱分布更稳。
因此,论文使用 Complementary Fusion Block,简称 CFB,将二者进行互补融合:
也可以写成:
其中, 是互补融合模块,主要由一系列卷积层构成。
直观理解就是: 空间结果+光谱结果→最终 HrHSI
九、损失函数设计
本文不仅直接约束重建结果,还设计了多个一致性约束,分别保证空间、光谱以及最终融合结果的质量。
1. 双分支重建损失
首先,对空间分支和光谱分支的预测结果都进行监督:
这个损失保证两个分支都能接近真实 HrHSI。
2. 空间与光谱退化一致性损失
由预测的 HrHSI 可以通过 PSF 和 SRF 退化得到对应的 LrHSI 和 HrMSI:
于是可以约束:
其中,PSF 表示点扩散函数,主要模拟空间模糊与下采样;SRF 表示光谱响应函数,主要模拟从 HSI 到 MSI 的光谱退化。
这个损失的意义是: 如果重建结果是正确的,那么它退化回去应该接近原始观测图像。
3. PSF-SRF 一致性约束
论文还约束由 HrMSI 和 LrHSI 得到的 MSI 表示保持一致:
这个损失进一步增强了空间退化和光谱退化之间的一致性。
4. 最终融合结果监督
最终输出 也需要接近真实 HrHSI:
5. 总损失
最终训练目标为:
可以看到,本文的损失设计不是单纯的像素重建,而是同时考虑:
双分支重建+退化一致性+最终融合监督,这也是它能够保持空间-光谱一致性的关键。
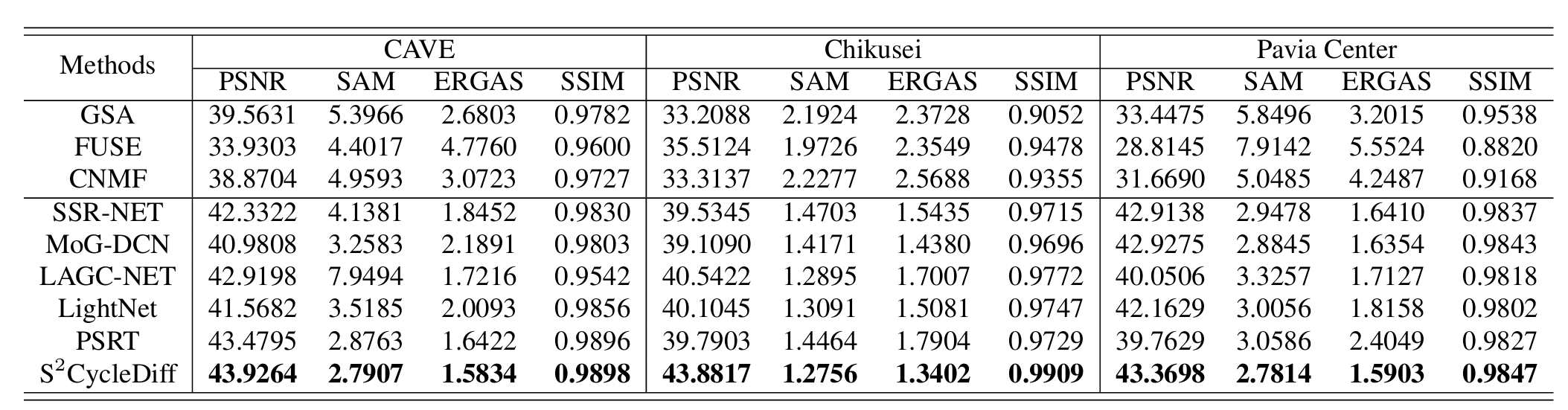
十、实验设计
论文在三个常用数据集上进行了实验:
- CAVE;
- Chikusei;
- Pavia Center。
评价指标包括:
- PSNR:峰值信噪比,越高越好;
- SAM:光谱角映射,越低越好;
- ERGAS:全局相对误差,越低越好;
- SSIM:结构相似性,越高越好。
对比方法包括传统方法和深度学习方法,例如 GSA、FUSE、CNMF、SSR-NET、MoG-DCN、LAGC-NET、LightNet、PSRT 等。
从论文结果可以看出,S²CycleDiff 在 CAVE、Chikusei 和 Pavia Center 三个数据集上整体取得了最优或非常有竞争力的结果。例如,在 CAVE 数据集上,S²CycleDiff 的 PSNR 达到 43.9264,SAM 为 2.7907,ERGAS 为 1.5834,SSIM 为 0.9898;在 Chikusei 数据集上,PSNR 达到 43.8817,SSIM 达到 0.9909;在 Pavia Center 数据集上,PSNR 达到 43.3698,SAM 为 2.7814。
这说明该方法不仅在空间细节恢复方面有效,也能较好地保持光谱一致性。
十一、消融实验分析
论文还进行了消融实验,主要验证两个问题:
1. 双向循环扩散是否有效?
作者设计了两个变体:
- Variant-Spa:只保留空间分支;
- Variant-Spe:只保留光谱分支。
实验结果表明,完整的 S²CycleDiff 优于单分支变体。
这说明:
空间分支和光谱分支不是重复设计,而是互补关系。单独依赖空间分支,容易光谱保持不足;单独依赖光谱分支,空间细节恢复不够。只有二者结合,才能得到更好的 HrHSI。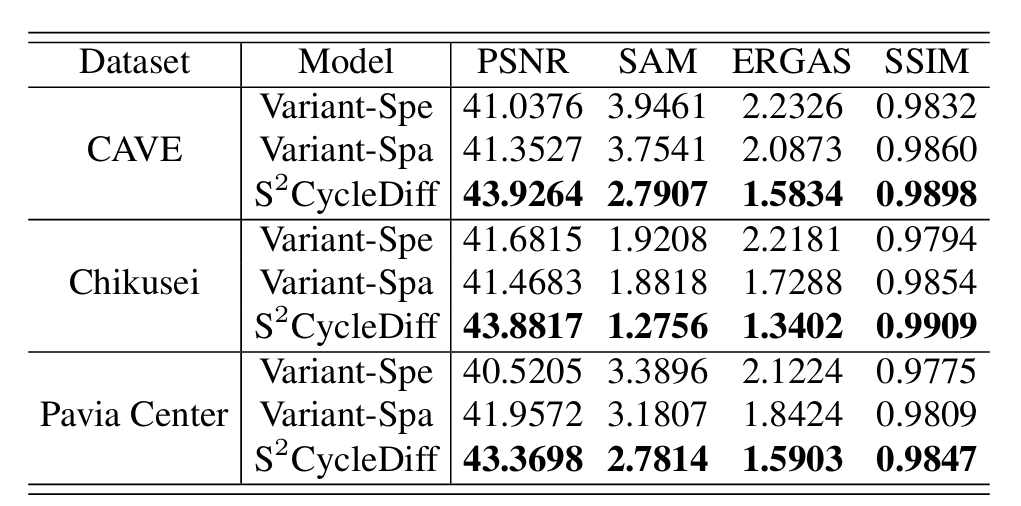
2. DIB 是否有效?
论文还比较了无引导因素、直接拼接引导因素和完整 DIB 三种形式。结果表明,使用交叉注意力进行细节注入的 DIB 效果最好。
这说明: 有效引导>简单拼接
也就是说,HrMSI 和 LrHSI 中的信息不能粗暴地塞进网络,而应该通过注意力机制进行选择性注入。
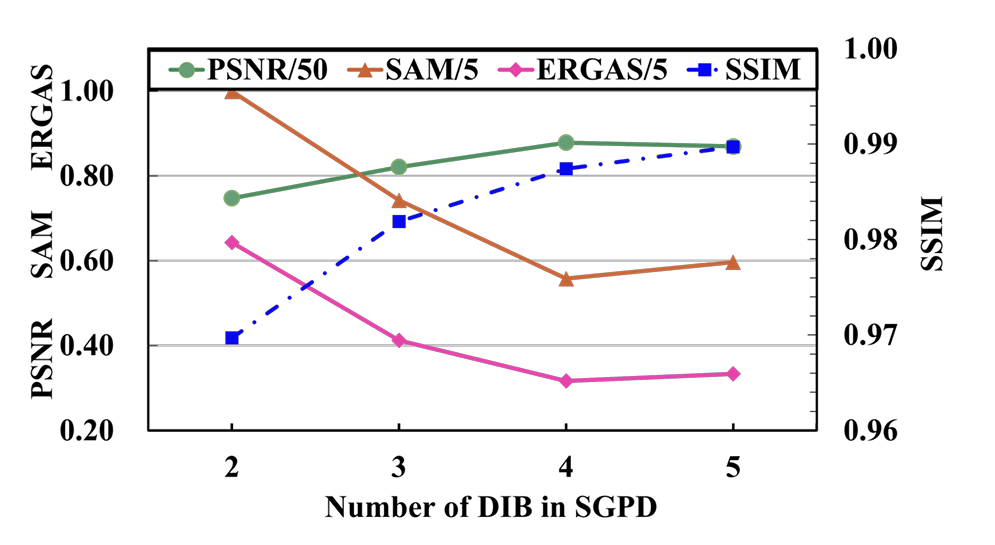
3. DIB 数量影响
论文进一步分析了 SGPD 中 DIB 数量的影响。实验表明,当 DIB 数量设置为 4 时,模型取得较优性能。
这说明多尺度细节注入是有必要的,但也不是越深越好。太少会导致细节建模不足,太多则可能增加冗余和训练难度。
十二、方法总结
S²CycleDiff 的核心可以总结为:
其中:
从整体思想来看,本文并不是简单地把扩散模型套到 HISR 任务上,而是结合高光谱-多光谱融合任务的特点,专门设计了空间分支和光谱分支。
空间分支关注: 如何从 HrMSI 中注入更清晰的空间纹理
光谱分支关注: 如何从 LrHSI 中保持更准确的光谱分布
最终通过 CFB 互补融合,得到具有高空间分辨率和高光谱保真度的 HrHSI。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 11
11 0
0- 0



 已为社区贡献6条内容
已为社区贡献6条内容

所有评论(0)