基于区块链的人机协作数字孪生系统云边协同数据管理研究
个性化消费促使生产模式转变,人机协作(HRC)与数字孪生(DT)结合形成的人机协作数字孪生系统(HRCDTS )成为研究热点,但 HRCDTS 在数据管理方面存在诸多问题,如数据模型构建困难、数据共享和存储缺乏有效方法。本文旨在通过引入区块链和云边协同技术,解决这些问题,为 DT 在 HRC 领域的应用提供数据管理参考。本文介绍的研究基于HRCDTS设计了复杂产品装配任务场景,采用 ErgoLAB 人机环同步平台V3.0同步采集并分析被试的多模态生理数据(心率、呼吸等),进一步探索能够有效表征人机协作过程中工作效率与安全性的多种指标。
01引言
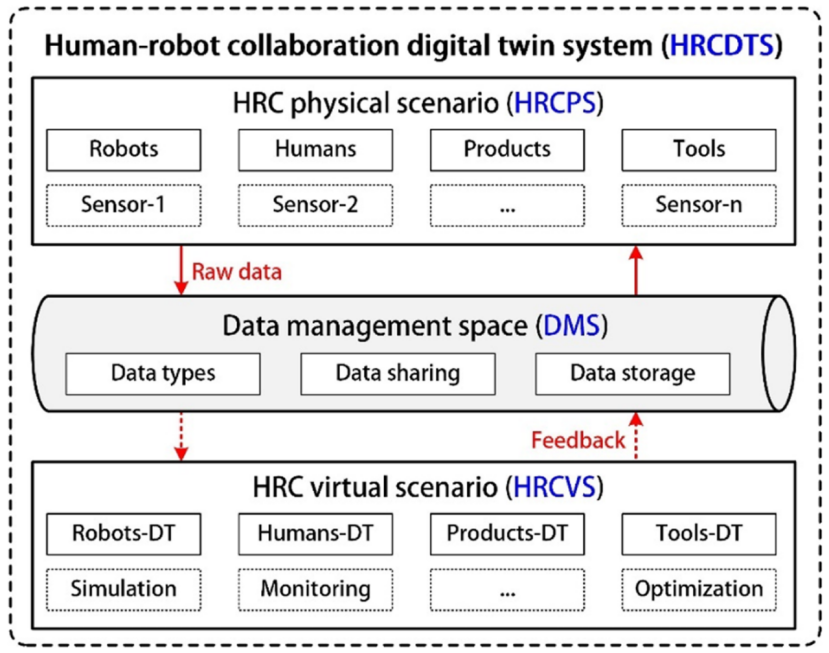
随着制造业向智能化方向迈进,以及数字孪生技术的兴起和人机协作模式的广泛应用,特别是区块链与云技术的融合发展,使得传统的数据管理面临了新的复杂性和挑战。数字孪生技术构建出物理实体的虚拟映射,区块链技术保障数据安全共享,云技术提供高效存储,这些技术的结合改变了数据的产生、传输和存储方式,使得数据管理变得更加复杂和多元化。所以在HRCDTS中,数据管理不再局限于传统的存储和传输,而是涉及多源异构数据的高效分类、安全共享与智能存储。传统的数据管理方法已逐渐不能满足 HRCDTS 的需求,因此基于区块链和云边协同的数据管理技术成为当前研究的重点之一。
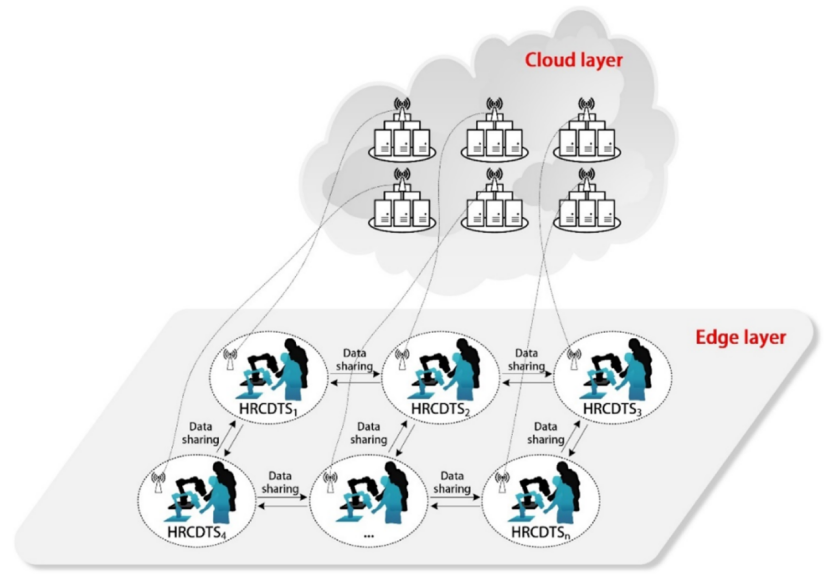
基于数字孪生和人机协作技术的快速发展,制造业正逐步向定制化、柔性化生产转型。在这种趋势下,HRCDTS 通过模拟和优化人机协作过程,实现定制化生产任务的高效执行。在复杂的生产任务中,多个 HRCDTS 需要协同工作,它们之间的数据交互和共享变得至关重要。同时,不同协作者在参与 HRCDTS 时,也需要安全、便捷地获取和传递数据,以确保生产任务的连续性和准确性。
而传感器技术和数据采集设备的不断进步,使得我们能够实时收集机器人的运行数据、人类的生理和行为数据、协作对象及环境数据等。通过对这些多源异构数据的整合与分析,能够全面了解人机协作的状态,为优化协作过程提供依据。在数据管理方面,借助区块链的去中心化、防篡改特性和云技术的低成本、高扩展性,能够实现 HRCDTS 数据的安全共享和高效存储。例如,利用区块链技术建立数据共享机制,结合云存储技术存储大量数据,能够满足 HRCDTS 对数据管理的严格要求。
下面请阅读基于ErgoLAB 人机环境同步平台V3.0的 HRCDTS 数据管理方法的研究。
02研究案例
题目:Blockchain-based cloud-edge collaborative data management for human-robot collaboration digital twin system
作者:Xin Liu , Gongfa Li , Feng Xiang , Bo Tao , Guozhang Jiang
期刊:Journal of Manufacturing Systems
DOI:https://doi.org/10.1016/j.jmsy.2024.09.006
研究背景
在全球化市场背景下,个性化消费需求增长,传统以工业机器人为中心的大规模生产模式难以满足需求,制造模式逐渐向多品种、小批量生产转变,HRC制造模式应运而生。DT技术的出现为构建最优 HRC 环境提供了思路,其与 HRC 物理环境结合形成的HRCDTS能自主执行定制生产任务。然而,目前针对 HRCDTS 数据的研究有限,存在数据类型、内容和格式缺乏标准化定义,数据共享和存储方法不完善等问题。
研究目的
本研究旨在提出一种基于区块链的云边协同数据管理框架,用于 HRCDTS 的数据管理。具体包括对 HRCDTS 中的数据进行分类和定义;研究 HRCDTS 之间以及同一 HRCDTS 不同协作者之间的数据共享方法;探索基于区块链和云的 HRCDTS 数据存储方法,从而为基于 DT 的 HRC 应用在数据方面提供参考方法,填补 HRC 领域中 DT 数据管理的研究空白。
案例研究
实验设计与任务
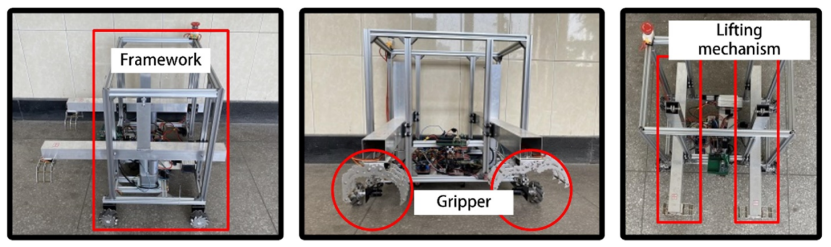
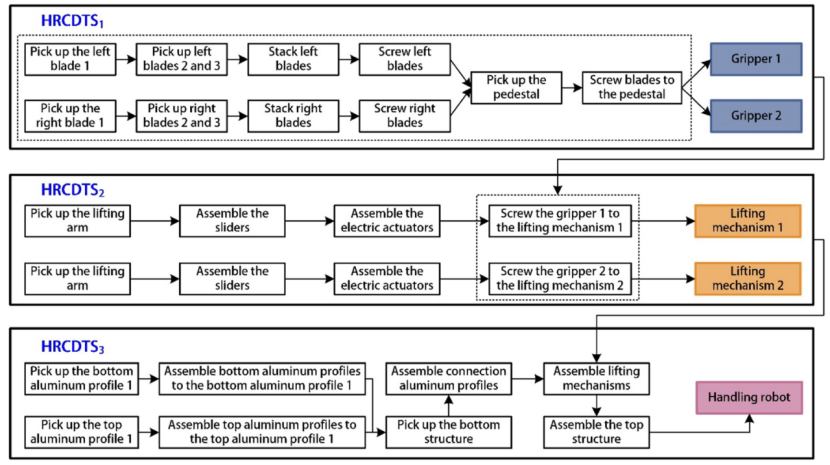
以搬运机器人装配为例进行案例研究,该机器人由整体框架、抓爪和提升机构三个主要部件构成。依据文中确定 HRCDTS 数量的方法,将装配任务细分为三个子任务,分别由 3 个 HRCDTS 协同完成。其中,HRCDTS 1 负责抓爪装配,涵盖抓取左右叶片、堆叠叶片并拧装等具体操作;HRCDTS 2 承担提升机构装配,包括拾取提升臂、组装滑块和电动执行器、安装抓爪等步骤;HRCDTS 3 负责整体框架装配,涉及拾取铝型材、组装框架各部分结构等任务。
各 HRCDTS 中的人机任务分配明确,如在 HRCDTS 1 中,机器人负责拾取部分零件,被试负责堆叠和拧装等操作。三个工作场景的配置一致,均包含 5 自由度可软件操作的机器人、具有标准物理特征的人员、用于捕捉位置数据的深度摄像头、采集人员心率和血压等生理参数的设备,以及装配所需的其他工具。物理场景保持一致,虚拟场景借助 Unity 软件构建,这种统一配置有助于提升协同装配效率。
设备与流程
通过北京津发科技股份有限公司自主研发的ErgoLAB人机环境同步平台V3.0,实时同步记录生理信号,该平台支持多种智能可穿戴设备同步采集,以实时收集被试在装配过程中的多维度信号。本研究结合ErgoLAB可穿戴脑电设备采集了参与者的EEG信号,通过ErgoLAB Bio智能可穿戴生理传感器采集心电(ECG)、肌电(EMG)、体温(SKT)、血压(BP)等信号。

正式实验时,依据搬运机器人结构特点,其装配任务被分为三个子任务,由 3 个 HRCDTS 协作完成, 各任务持续时间依实际装配所需时间确定。完成装配后,各 HRCDTS 将装配时间、精度、异常情况等详细数据上传至基于区块链和云搭建的平台用于评估任务完成质量。
数据分类与建模
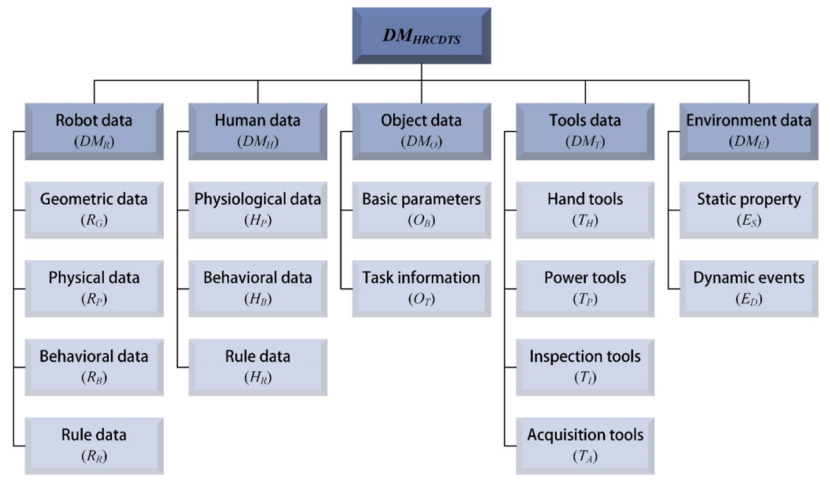
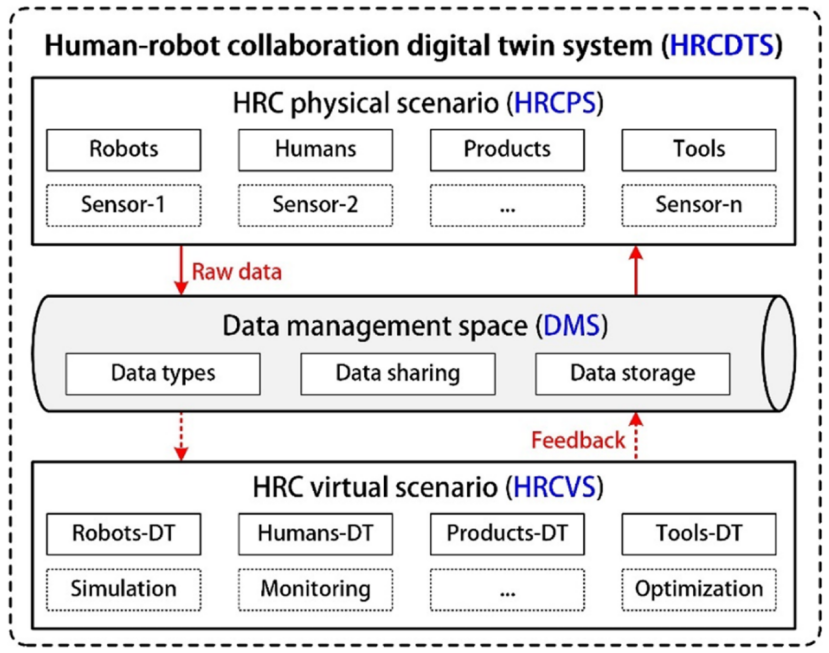
HRCDTS 数据模型DMHRCDTS是一个五元组,由机器人数据DMR、人类数据DMH、协作对象数据DMO、协作工具数据DMT和协作环境数据DME构成。该模型采用树状分层结构,支持多种数据格式,具有面向对象、可定制和可扩展的特点。
机器人数据DMR
包含机器人几何数据、物理数据、行为数据和规则数据,这些数据是机器人 DT 模型的重要组成部分,对机器人工作状态的确定和工作行为的体现至关重要。
人类数据DMH
由人类生理数据、行为数据和规则数据组成,反映了人类参与者在协作过程中的生理状态、工作状态等信息,对评估舒适度和保障人员安全具有重要意义。
协作对象数据DMO
包括协作对象的基本参数和任务信息,任务分解和分配有助于明确任务执行细节和各方责任,提高任务执行效率。
协作工具数据DMT
涵盖协作过程中使用的各类辅助工具数据,如手动工具、电动工具、检测工具和采集工具等,不同工具在协作中发挥着不同的作用。
协作环境数据DME
包含协作环境的静态属性和动态变化数据,静态属性如环境布局等相对稳定,动态变化数据如机器人故障等反映了协作过程中的实时情况。
数据共享
在 HRCDTS 数据共享中采用许可区块链,其仅允许授权用户访问,数据处理速度快且对共识机制要求低。数据共享分为 HRCDTS 间共享和同一 HRCDTS 不同协作者间共享。
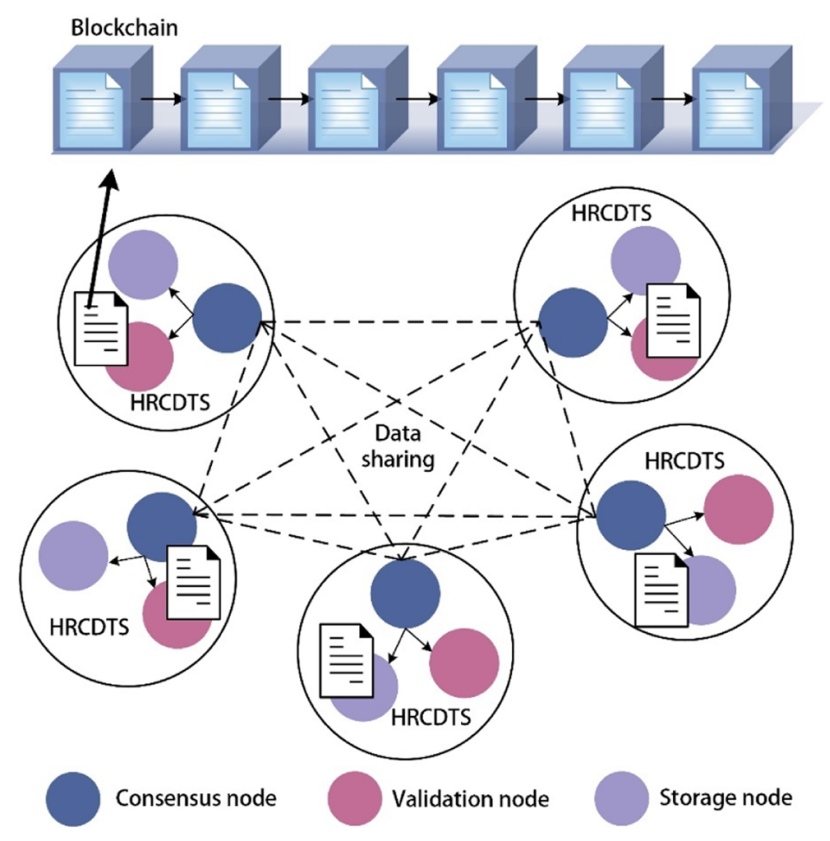
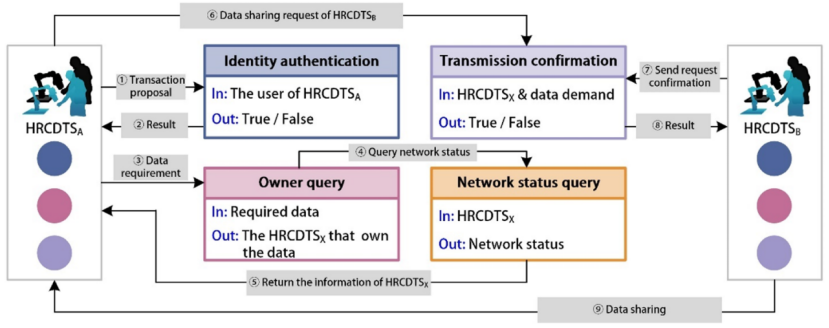
HRCDTS 间数据共享
每个 HRCDTS 包含共识节点、验证节点和存储节点,负责处理交易、验证区块和存储数据。数据共享过程包括交易提议、身份验证、所有者查询、网络状态查询和传输确认等步骤,确保数据准确、安全地传输。
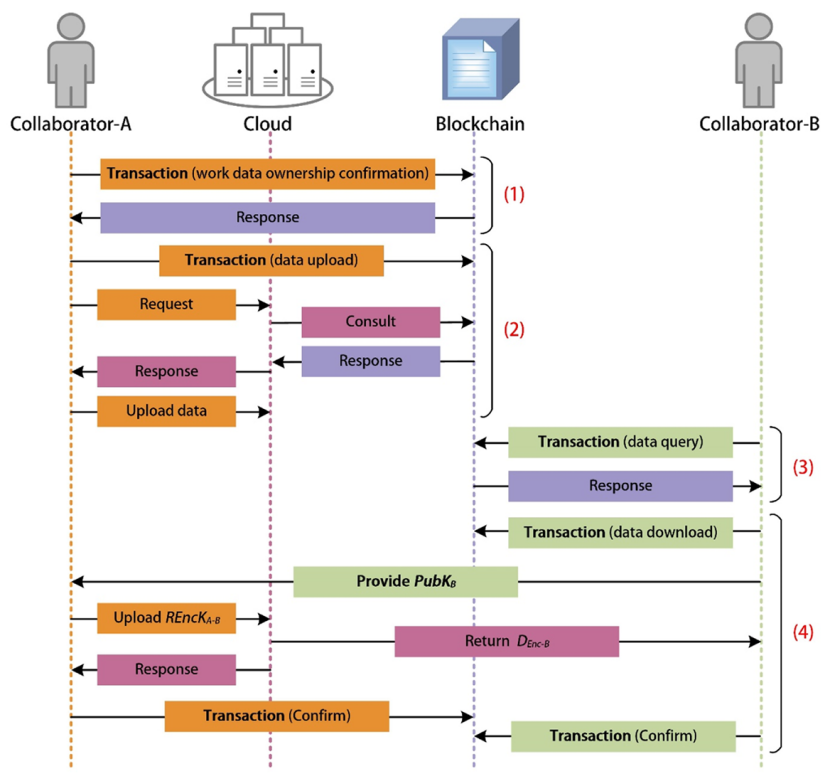
同一 HRCDTS 不同协作者间数据共享
原协作者将工作数据加密上传至云,新协作者通过云下载数据。数据共享过程涉及所有权确认、数据上传、数据查询和数据下载等操作,并采用代理重加密(PRE)技术确保数据安全。
数据存储
考虑到 HRCDTS 产生的数据量庞大,采用本地和云存储相结合的方式。
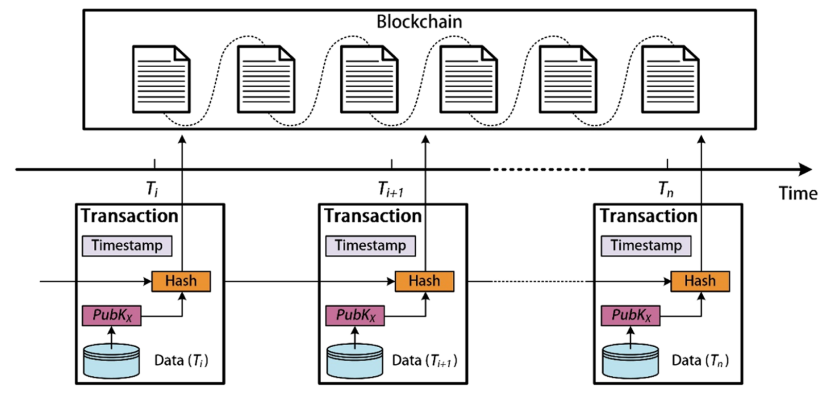
HRCDTS 本地数据存储
采用基于区块链的周期性本地存储系统,定期生成新交易记录传感器数据。原始数据存储在本地数据库,数据哈希值存储在区块链,以证明数据的存在和有效性,减少数据库占用和存储成本。
HRCDTS云数据存储
HRC 虚拟场景数据和物理场景异常数据存储在云系统中,便于调整协作策略、监督和改进 HRC 物理场景,同时方便其他人员查看和下载数据。
研究结果
数据交互有效
通过搬运机器人装配案例可知,基于区块链的云边协同数据管理方法,实现了多个 HRCDTS 之间的数据交互。如 HRCDTS1 完成 gripper 装配后,其装配细节数据能顺利上传至云,并被 HRCDTS2 获取用于 lifting mechanism 装配,确保装配工作有序进行,提高了协作效率 。
数据共享安全
区块链技术的应用保障了数据共享安全。在数据共享过程中,交易信息被安全记录在区块链网络,如数据所有权确认、数据上传下载等交易都有详细记录,便于监督和追溯数据修改,增强了数据交换安全性。
存储成本降低
与传统存储方法对比,新的数据存储策略降低了成本。在搬运机器人装配案例中,采用区块链和云结合的存储方式,减少了数据存储和传输费用。如 HRCDTS1 的存储成本从传统方法的 73 美元降至 34 美元,传输成本从 10 美元降至 6 美元。
研究结论
本研究将区块链和云边技术引入 HRCDTS 数据管理领域,提出了数据模型,并研究了数据共享和存储技术。主要贡献包括标准化描述 HRCDTS,为 DT 在 HRC 领域的应用提供统一框架;提出数据模型,明确数据类型、内容和格式;验证了基于区块链的数据交互机制和区块链与云结合的存储方法的有效性。然而,该方法仍存在可优化之处,如数据共享过程中的安全风险和区块链数据查询效率问题,需进一步研究解决。
部分参考文献
[1]Zhou, J., Li, P., Zhou, Y., Wang, B., Zang, J., & Meng, L. (2018). Toward new-generation intelligent manufacturing. Engineering, 4(1), 11-20.
[2]Schuh, G., Kelzenberg, C., Wiese, J., & Kessler, N. (2020). Creation of digital production twins for the optimization of value creation in single and small batch production. Procedia CIRP, 93, 222-227.
[3]Angleraud, A., Ekrekli, A., Samarawickrama, K., Sharma, G., & Pieters, R. (2024). Sensor-based human–robot collaboration for industrial tasks. Robotics and Computer-Integrated Manufacturing, 86, 102663.
[4]Berx, N., Decré, W., Morag, I., Chemweno, P., & Pintelon, L. (2022). Identification and classification of risk factors for human-robot collaboration from a system-wide perspective. Computers & Industrial Engineering, 163, 107827.
[5]Giallanza, A., La Scalia, G., Micale, R., & La Fata, C. M. (2024). Occupational health and safety issues in human-robot collaboration: State of the art and open challenges. Safety science, 169, 106313.
[6]Ma, X., Qi, Q., Cheng, J., & Tao, F. (2022). A consistency method for digital twin model of human-robot collaboration. Journal of Manufacturing Systems, 65, 550-563.
03研究拓展
本文通过构建基于区块链的云边协同架构,对HRCDTS的数据管理进行了研究。随着工业 4.0 和智能制造的深入发展,人机协作场景日益复杂多样,对数据管理的实时性、安全性和高效性提出了更高要求。HRCDTS 在应对更复杂的任务和更多样化的协作场景时,需要不断优化数据管理策略。融合人工智能技术,如机器学习算法对海量数据的深度分析能力,能够挖掘数据间潜在关系,为优化人机协作流程、预测系统故障提供有力支持,可进一步探索其在 HRCDTS 数据管理中的应用。
04引申阅读
【1】 题目:Perceptual design method for smart industrial robots based on virtual reality and synchronous quantitative physiological signals
作者:Wangqun Xiao, Jianxin Cheng
期刊:International Journal of Distributed Sensor Networks
DOI:10.1177/1550147720917646
【2】题目:Prediction of product design decision Making: An investigation of eye movements and EEG features
作者:Yahui Wang, Suihuai Yu, Ning Ma, Jinlei Wang, Zhigang Hu, Zhuo Liu, Jibo He
期刊:Advanced Engineering Informatics
DOI:10.1016/j.aei.2020.101095
【3】题目:Mining Potential Requirements by Calculation of User Operations
作者:Yanqun Huang, Gaofeng Pan, Xu Li, Zhe Sun, Shinichi Koyama, and Yanqun Yang
期刊:Journal of Organizational and End User Computing
DOI:10.4018/JOEUC.293289
tip
本文仅用于学术交流,原文版权归原作者和原发刊所有。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐



 3
3 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)