【MATLAB 】基于 MATLAB 的他励直流电机牵引传动系统双闭环弱磁调速建模与鲁棒性研究
摘要
面向电力牵引列车宽调速域、强抗干扰运行需求,以 26 吨城市电车牵引系统为研究对象,依托他励直流电机转矩与磁通解耦特性,搭建电枢回路、励磁回路、机械传动一体化动力学模型,设计速度外环 - 电枢电流内环 - 励磁电流环三闭环 PID 调速控制系统。系统基速区间采用恒励磁调压调速,超额定转速后切换弱磁控制,最高扩速至额定转速 1.25 倍。基于 MATLAB/Simulink 搭建仿真平台,构造总长 10km、包含 ±5% 坡道与多级限速的 700s 实际线路工况,开展基线跟踪、PI 与 PID 控制对比、负载扰动、弱磁深度扫描、机电参数摄动、抗饱和策略对照共六组仿真实验。结果表明:系统稳态转速跟踪均方根误差 9.96rad/s;速度环微分环节稳态优化幅度仅 0.08%,大惯量工况可舍弃;负载增大 20% 后,上下坡道跟踪误差相较标称工况扩大 6.4~7.4 倍;励磁电流遵循恒磁链反比调节规律,偏差低于 0.6%,1.5 倍额定转速弱磁工况误差相较临界工况提升约 28 倍;电枢电气参数 ±20% 扰动对控制精度影响不足 0.05%,等效转动惯量为系统核心敏感参数;重载饱和工况下,抗饱和补偿可将全程均方根误差由 34.71rad/s 降至 16.65rad/s,性能提升 52%,限幅闭锁与反计算两种抗饱和方案控制效果基本持平。研究成果可为牵引控制器选型、抗饱和优化、参数辨识精度界定提供量化参考依据。
关键词:他励直流电机;牵引传动;双闭环弱磁调速;鲁棒性分析;MATLAB/Simulink
1 引言
他励直流电机具备转矩特性线性、励磁电枢独立调控、控制架构简洁可靠等优势,广泛应用于城市轨道交通、工矿机车等电力牵引领域。电枢调压与励磁弱磁相结合的调控方式,可兼顾低速大转矩牵引与高速恒功率运行需求,是新型牵引控制算法研发的经典参照模型。
列车实际运行工况复杂多变,频繁启停、坡道阻力扰动、分段限速及高速弱磁切换,对控制系统动态响应、稳态精度与抗扰能力提出严苛要求。传统 PID 控制器依据额定工作点整定参数,面对负载波动、电流饱和、弱磁状态切换时易出现控制性能衰减。本文以 26t 电车牵引单元为研究载体,搭建完整三闭环弱磁调速仿真模型,依托真实线路工况开展多维度性能测试,量化分析系统控制边界与参数敏感度,明确优化改进方向。
2 研究方法
2.1 电机动力学模型
建立电枢回路、励磁回路与机械运动方程:
\(u_a = R_a i_a + L_a \frac{\mathrm{d} i_a}{\mathrm{d} t} + k_s i_e \omega\)\(u_e = R_e i_e + L_e \frac{\mathrm{d} i_e}{\mathrm{d} t}\)\(T_e = k_c i_a i_e,\quad J_{eq}\frac{\mathrm{d}\omega}{\mathrm{d} t} = T_e - T_L\)
结合车辆牵引参数与电机额定指标,求解系统核心参数:等效转动惯量\(73.25\mathrm{kg\cdot m^2}\),转矩与反电势常数\(1.7197\),电枢电阻\(0.084\Omega\)、电感\(0.84\mathrm{mH}\),励磁电阻\(120\Omega\)、电感\(120\mathrm{H}\),额定转速\(314\mathrm{rad/s}\)。
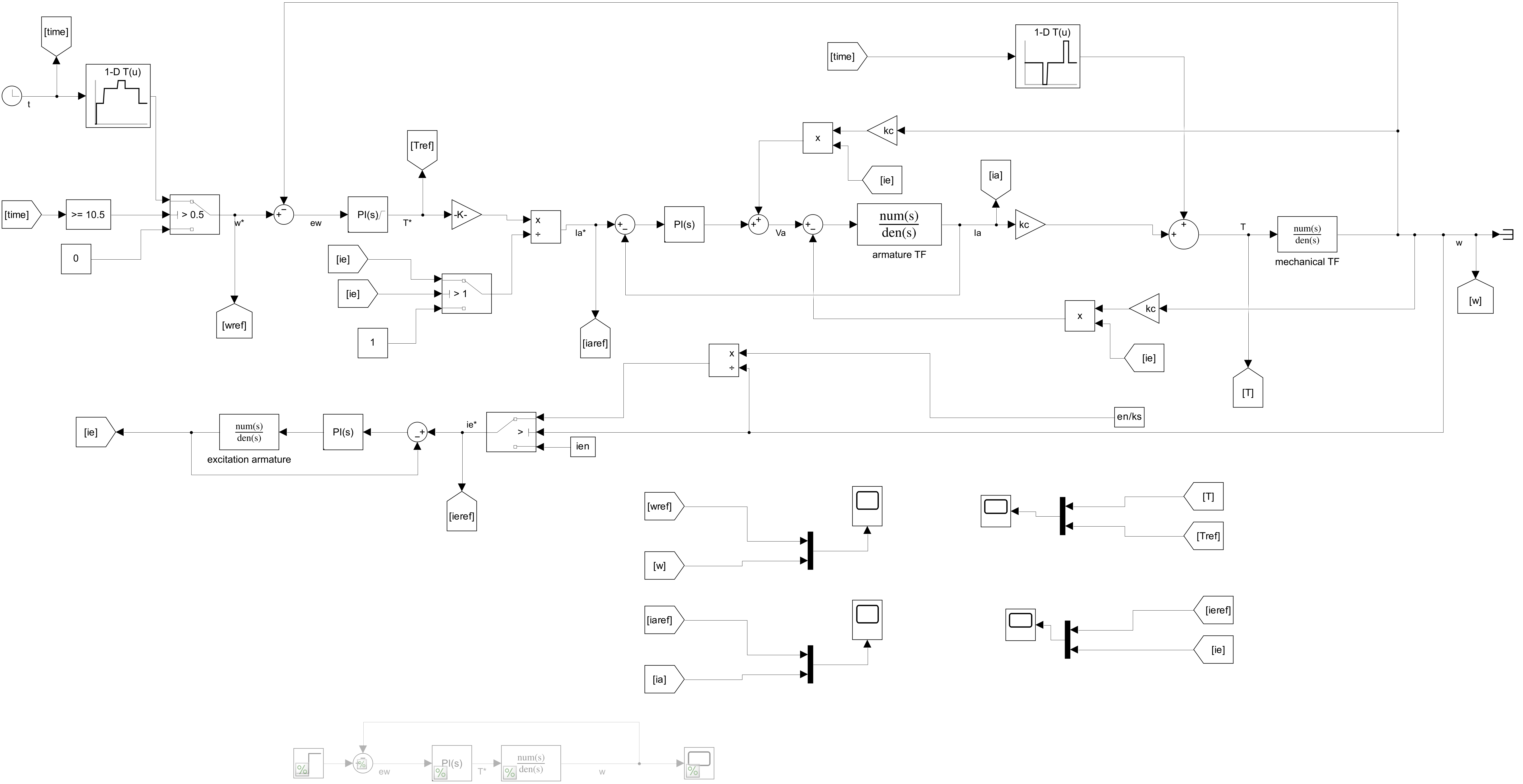
2.2 三闭环控制架构
控制系统采用串级 PID 结构,速度环输出转矩指令,电枢电流环快速跟踪电流给定值,励磁电流环实现强弱磁切换控制。转速低于 315rad/s 保持恒定励磁,转速超限后按照磁通反比规律降低励磁电流,实现宽域调速。三组控制器整定参数确定电枢电流限值为\(\pm800\mathrm{A}\),保障器件运行安全。
2.3 仿真工况设计
仿真线路全程 10km,总时长 700s,涵盖起步加速、匀速行驶、上坡、高速弱磁、下坡减速等典型工况,设置四级车速限制与 ±5% 坡道阻力扰动。通过缩放负载转矩幅值,构建轻载、额定、重载三类扰动工况;调整弱磁目标转速,完成 1.0~1.5 倍额定转速深度扫描;分别对电枢电阻、电感、等效惯量施加 ±20% 参数偏移,检验模型鲁棒性。
2.4 评价指标
以转速跟踪误差为核心评判标准,统计全程与分段均方根误差、最大瞬时误差,精准定位性能薄弱区间。
2.5 积分抗饱和策略
针对重载工况积分饱和失效问题,对比限幅闭锁、反计算两种经典抗饱和算法。限幅闭锁策略在控制量饱和且误差同向时冻结积分运算;反计算策略通过偏差反馈抵消积分冗余,消除积分漂移带来的控制滞后。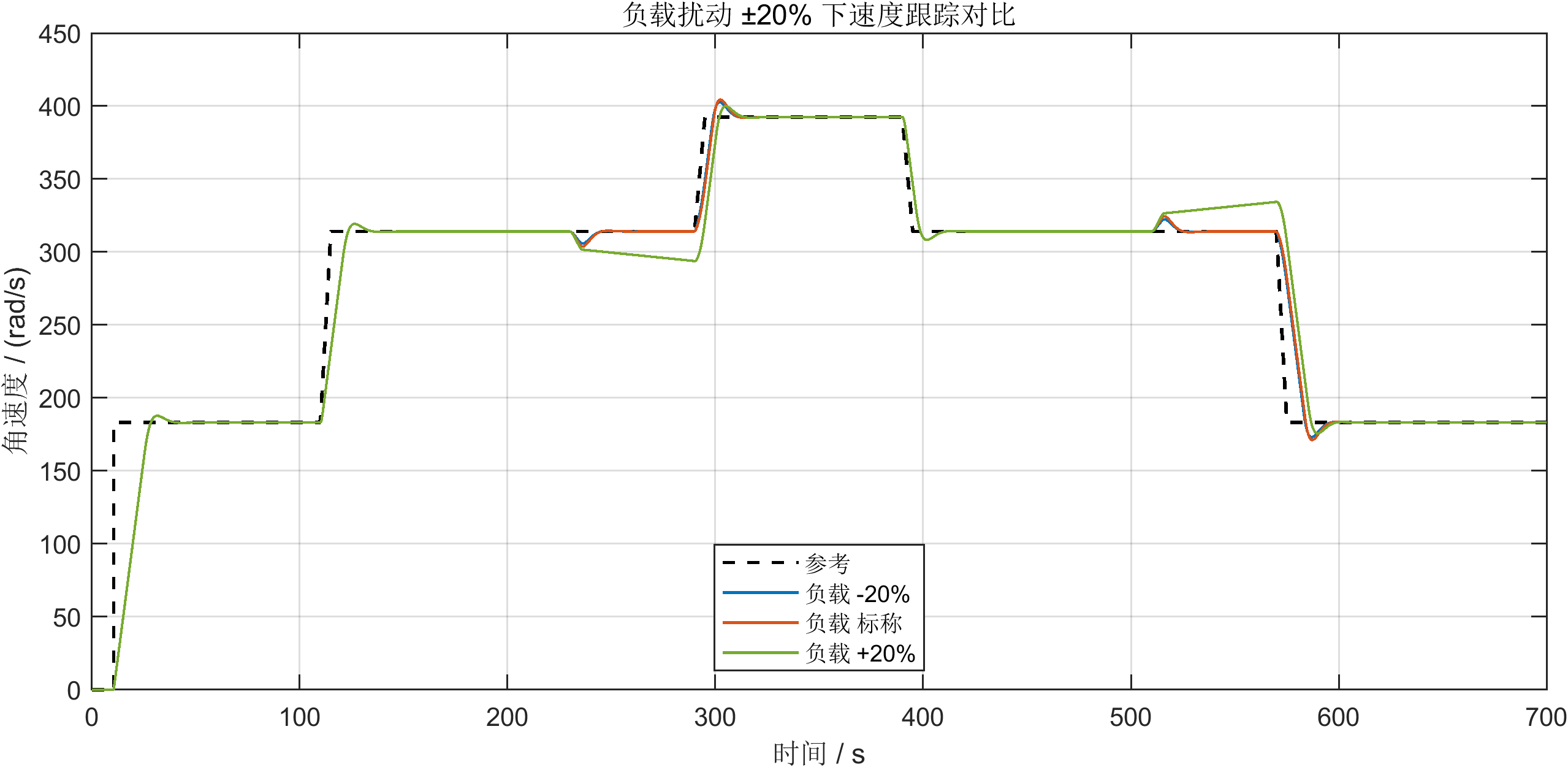
3 仿真结果
3.1 基线工况跟踪特性
系统可平稳完成全线路工况运行,稳态转速均方根误差 9.96rad/s,起步阶跃指令处瞬时误差峰值 183.13rad/s。电枢电流峰值 466A,留有充足调控余量;低速励磁电流稳定 1A,弱磁工况降至 0.8A;控制器可有效抵消坡道阻力,坡道区段跟踪误差控制在 2.64rad/s 以内。
3.2 PI 与 PID 控制性能对比
速度环增设微分环节后,稳态误差仅由 9.9578rad/s 降至 9.9494rad/s,精度提升幅度仅 0.08%。大惯量牵引系统固有低通特性削弱微分调节作用,工程应用可简化为 PI 控制。
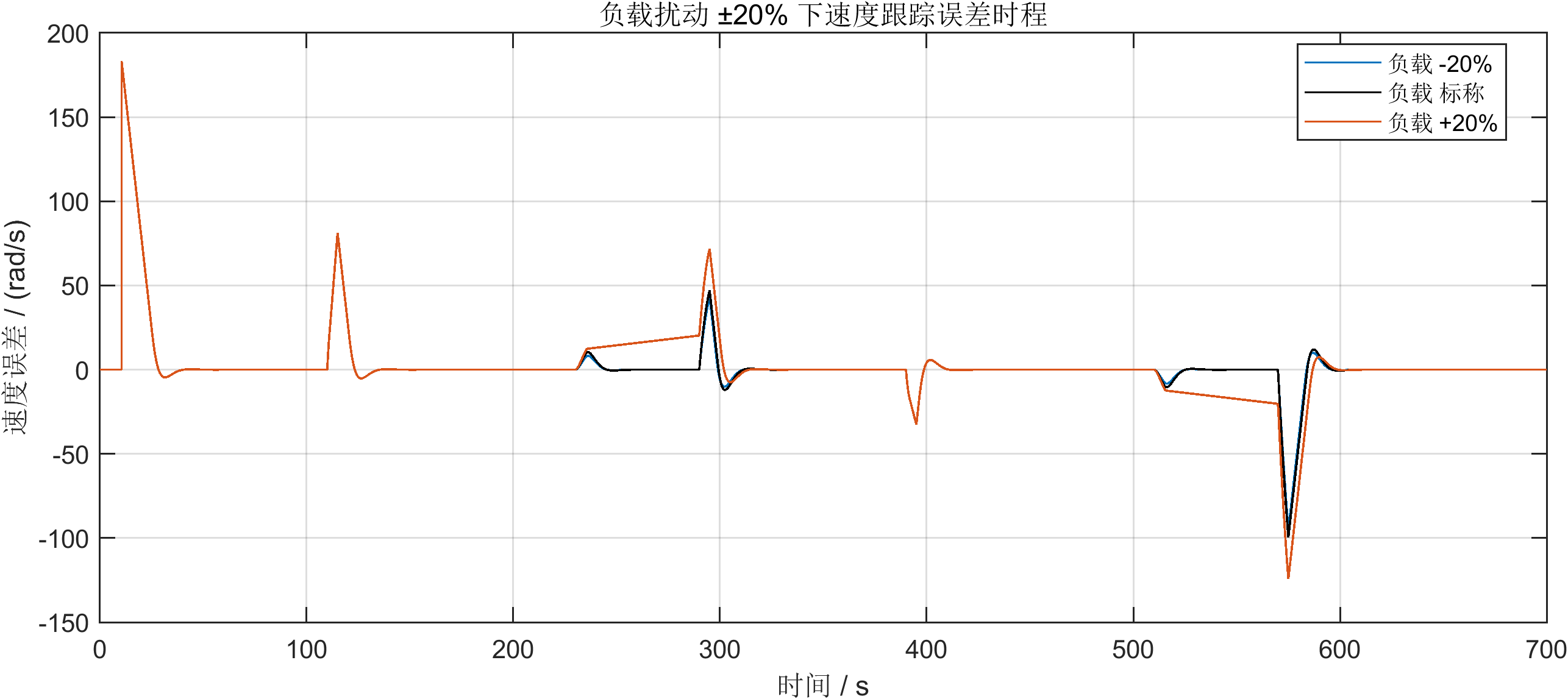
3.3 负载扰动鲁棒性
负载缩减 20%、额定负载、负载增加 20% 工况下,全程误差依次为 9.52rad/s、9.96rad/s、14.92rad/s。重载条件下上下坡道误差大幅攀升,相较标称工况扩大 6.4~7.4 倍,电流限幅导致闭环调节能力下降。
3.4 弱磁深度性能测试
励磁电流实测数值与理论反比公式偏差小于 0.6%,弱磁调控逻辑精准可靠。随着弱磁深度提升,系统控制裕度逐步缩减,1.5 倍额定转速工况跟踪误差较临界弱磁状态扩大约 28 倍,深度弱磁会显著降低控制精度。
3.5 机电参数敏感度分析
电枢电阻、电感 ±20% 参数偏移对系统误差影响低于 0.05%,电气参数容错性较高;等效转动惯量减小 20%,误差降低 17.7%,惯量增大 20%,误差上升 15.7%,机械惯量是决定控制性能的关键参数。
3.6 抗饱和策略效果验证
无抗饱和、限幅闭锁、反计算模式下,全程误差分别为 34.71rad/s、16.65rad/s、16.66rad/s。抗饱和补偿可大幅改善重载控制效果,两种优化策略控制效果基本一致,提升积分算法复杂度无实际增益。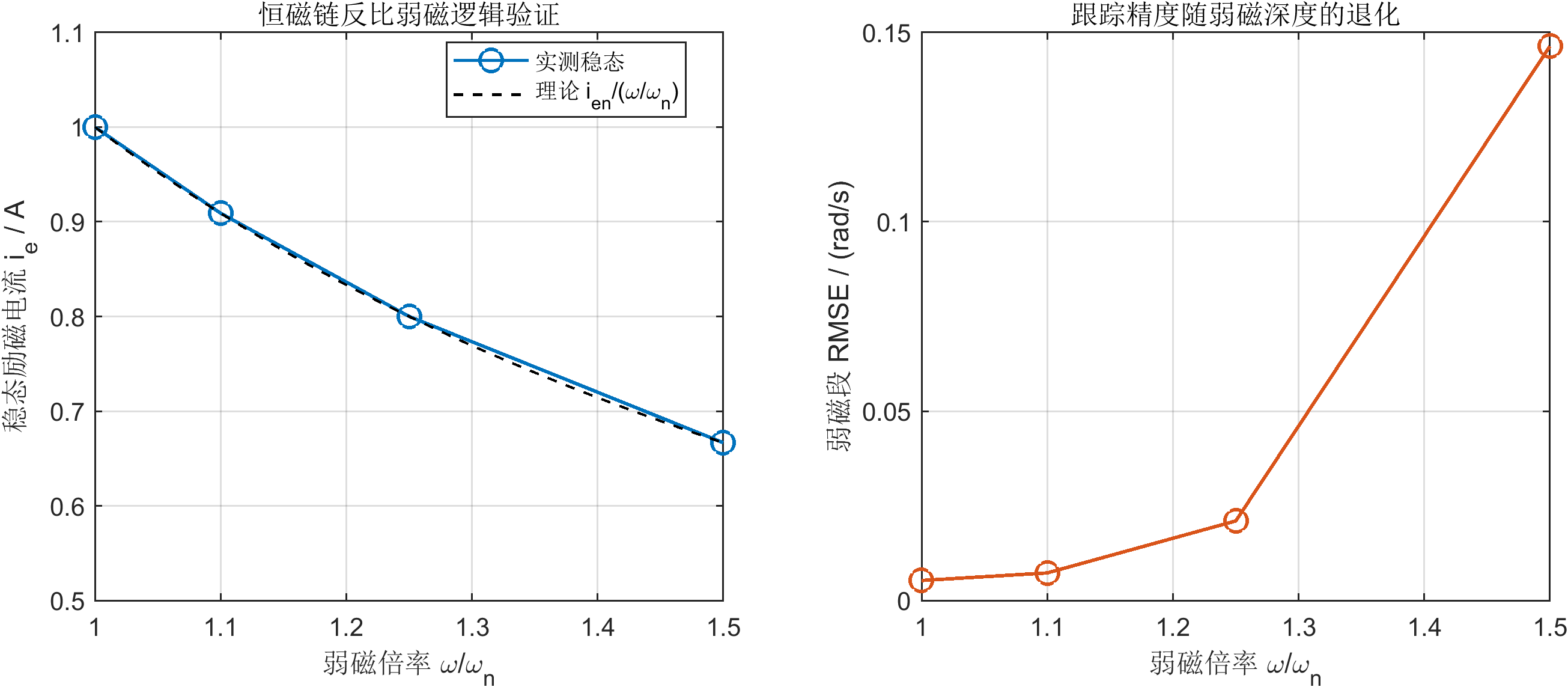
4 分析与讨论
基准仿真表明,三闭环调速系统可实现 1.25 倍额定转速稳定运行,基础调速与坡道抗扰性能满足牵引基本需求,阶跃参考信号是瞬时误差产生的主要诱因。大惯量系统中微分调节作用有限,简化控制算法可降低参数调试难度,规避微分放大噪声风险。
负载超载引发电流饱和,闭环调节失效,是坡道工况误差激增的核心原因。现有控制器参数适配额定工况,极端负载下鲁棒性不足。弱磁调节逻辑符合理论规律,但深度弱磁压缩控制电压裕量,造成动态跟踪能力下降。电气参数变化可被高带宽电流环补偿,机械惯量直接影响系统动态响应,参数辨识工作应重点围绕惯量参数开展。
抗饱和算法可有效解决积分漂移问题,两类经典策略优化效果趋近,基础闭锁方案即可满足工程使用要求。坡道误差无法依靠抗饱和策略消除,后续可引入坡度前馈补偿、自适应增益调度算法,进一步提升复杂路况适配能力。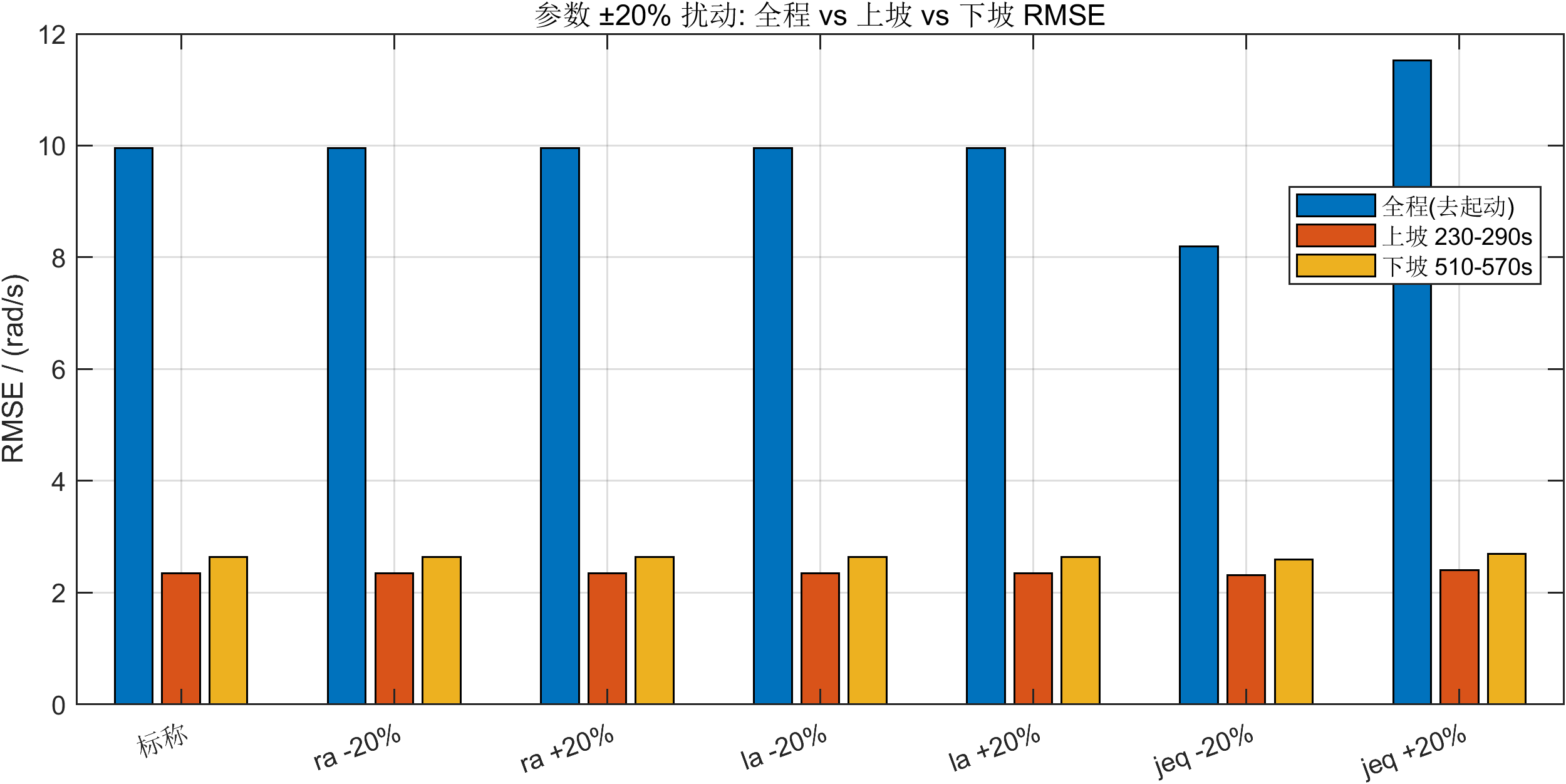
5 结论
本文完成 26t 电车他励直流电机三闭环弱磁调速系统建模与多工况仿真分析,得到核心结论如下:
- 系统可实现宽域稳定调速,基线工况转速跟踪精度良好,能够有效抑制常规坡道扰动;
- 大惯量牵引场景无需增设微分环节,PI 控制即可满足运行精度要求;
- 负载超载、深度弱磁均会大幅降低控制性能,机械转动惯量为系统最敏感参数,电气参数波动对控制效果影响微弱;
- 抗饱和补偿可显著改善重载积分饱和问题,两种主流优化方案性能无明显差距;
- 本次仿真数据可作为惯量观测、坡度前馈、自适应控制等优化算法的基准参照,为牵引传动系统工程设计提供量化依据。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐



 2
2 0
0- 0



 已为社区贡献20条内容
已为社区贡献20条内容

所有评论(0)