论文Review SLAM cuVSLAM | NVIDIA 2025 | CUDA加速的视觉里程计与建图系统
基本信息
题目: cuVSLAM: CUDA accelerated visual odometry and mapping
作者: Alexander Korovko, Dmitry Slepichev, Alexander Efitorov, Aigul Dzhumamuratova, Viktor Kuznetsov, Hesam Rabeti, Joydeep Biswas, Soha Pouya
机构: NVIDIA
论文版本: arXiv:2506.04359v3,2025 年 7 月修订版 (arXiv)
方向: Visual SLAM、Visual Odometry、Visual-Inertial Odometry、多相机 SLAM、CUDA 加速、机器人定位建图
是否开源: 是。NVIDIA 已公开 nvidia-isaac/cuVSLAM 仓库,并提供 Python API、C++ API 与 ROS2 支持。(GitHub)
一句话总结: 这篇论文不是提出一个单点算法,而是介绍 NVIDIA 面向真实机器人部署的 GPU 加速视觉 SLAM 系统 cuVSLAM,它支持单目、双目、RGB-D、视觉惯性、多双目相机等多种配置,并重点强调在 Jetson 等边缘设备上的实时性与鲁棒性。
这篇论文主要讲什么?
cuVSLAM 的核心目标是解决机器人视觉定位中的三个工程痛点:实时性、传感器配置灵活性、复杂环境下的鲁棒性。传统 VSLAM 系统往往针对固定传感器组合设计,例如单目、双目或视觉惯性模式,一旦换成多相机阵列、RGB-D 或边缘端硬件,就需要大量适配和调参。cuVSLAM 则试图提供一个统一的视觉定位与建图框架,从 1 个 RGB 相机到最多 32 个相机均可支持,并且可以结合 IMU 和深度传感器。
从系统架构上看,cuVSLAM 采用经典但工程化程度很高的前后端结构:前端负责低延迟的在线位姿估计,维护局部里程计地图;后端负责异步的全局地图优化、回环检测和位姿图优化。前端更关注轨迹的连续性和平滑性,后端则负责降低累计漂移、提升全局一致性。
论文覆盖的模式比较全面,包括 Mono、Stereo、Multi-Stereo、Stereo-Inertial、Mono-Depth 等。也就是说,它并不是只解决一个固定场景,而是把常见机器人视觉定位配置统一到一个 CUDA 加速库中。官方文档也将 cuVSLAM 定义为 GPU-accelerated stereo-visual-inertial SLAM and odometry library,并说明其 SLAM 相关操作会与视觉里程计并行运行。(NVIDIA Isaac ROS)
Introduction
视觉 SLAM 是机器人自主移动的基础能力之一。机器人需要在未知或半未知环境中同时完成两件事:估计自身位姿,以及构建环境地图。对于仓储机器人、配送机器人、无人机、移动操作机器人等应用来说,仅仅“能跑”是不够的,系统还必须满足实时、稳定、低功耗、可部署的要求。
论文指出,传统 VSLAM 系统主要面临以下问题:
-
在资源受限平台上难以保持实时性能;
-
对传感器配置要求较固定,不容易适配不同机器人;
-
没有充分利用 GPU/CUDA 等硬件加速能力;
-
在弱纹理、遮挡、窄走廊、电梯等场景中容易退化。
cuVSLAM 的思路并不是抛弃传统几何 SLAM,而是将经典视觉几何方法与 GPU 并行计算结合起来。它仍然使用特征跟踪、PnP、三角化、SBA、位姿图优化、回环检测等传统 SLAM 组件,但通过 CUDA 加速和工程化架构,使其能够在 NVIDIA Jetson 等边缘平台上实时运行。
研究问题与目标
这篇论文的研究目标可以概括为:
构建一个可在真实机器人平台上部署的、传感器配置灵活的、低延迟的 CUDA 加速视觉 SLAM 系统。
更具体地说,cuVSLAM 希望同时满足以下要求:
-
多传感器适配:支持单目、双目、RGB-D、IMU、多相机阵列等不同输入。
-
边缘端实时运行:在 Jetson 等功耗受限设备上仍然保持低延迟。
-
复杂环境鲁棒性:在弱纹理、局部遮挡、狭窄通道等场景下尽量避免跟踪失败。
-
全局一致建图:通过后端回环和位姿图优化降低累计漂移。
-
工程可用性:提供 ROS2、Python、C++ 等接口,方便机器人系统集成。
主要贡献
1. 提出一个 CUDA 加速的通用视觉 SLAM 系统
cuVSLAM 支持从单个 RGB 相机到最多 32 个相机的任意几何配置,并支持 IMU 和深度传感器。这个设计让它可以覆盖从低成本机器人到复杂多相机平台的不同需求。
2. 前端与后端解耦
系统将实时前端和异步后端分离。前端关注低延迟位姿估计,后端负责回环检测、全局地图优化和位姿图优化。这种设计可以避免全局优化阻塞实时跟踪,同时保证系统长期运行时不会无限累计漂移。
3. 支持多相机 Multi-Stereo 模式
论文中比较有特色的是 Multi-Stereo 设计。cuVSLAM 会把任意多相机配置看作若干双目组合,并在启动时自动构建 Frustum Intersection Graph,用于判断哪些相机视场存在重叠,从而决定跨相机跟踪关系。这个设计让系统可以适配任意相机布局,而不是只支持固定前后左右相机排列。
4. 将稀疏 BA、RGB-D 优化等模块放到 GPU 上
cuVSLAM 在 3D 模块中使用 Schur Complement 求解 SBA,并将其 CUDA 化,以提高多相机和边缘端场景下的效率。Mono-Depth 模式中,系统还将结合强度误差、深度误差、点到点误差的 Levenberg-Marquardt 优化放到 GPU 上执行。
5. 提供较完整的系统验证
论文不仅在 KITTI、EuRoC、TUM RGB-D、TUM-VI 等常见公开数据集上验证,还使用 TartanAir V2、TartanGround 以及 NVIDIA 自建 R2B 多相机真实数据集验证 Multi-Stereo 模式。实验覆盖单目深度、双目、双目惯性、多双目等不同配置。
Method
1. 系统整体架构
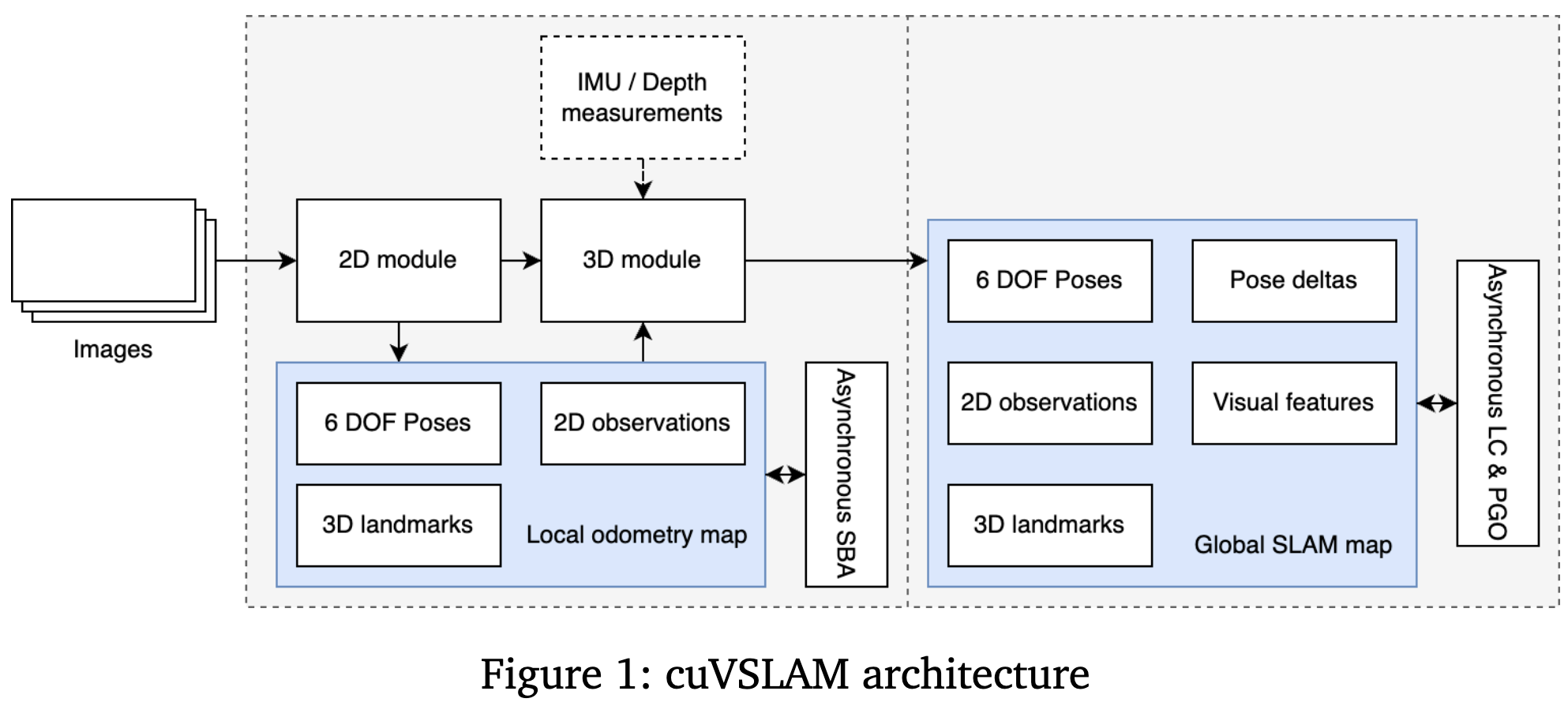
cuVSLAM 由两个主要部分组成:
Frontend: 负责在线位姿估计,强调低延迟和高吞吐。它维护一个局部里程计地图,包括最近 N 个关键帧位姿、可见 3D 路标点及其观测。前端进一步分为 2D 模块和 3D 模块。2D 模块负责特征选择、特征跟踪、关键帧选择;3D 模块负责基于局部地图、2D 观测、IMU 或深度数据进行位姿估计。
Backend: 负责全局一致性,包括回环检测、全局地图维护、位姿图优化。后端异步处理前端输出的关键帧、观测、路标点、位姿增量和视觉特征,从而降低长期累计漂移。
分析:
-
这种架构很适合真实机器人系统,因为机器人控制和导航需要稳定频率的 odometry 输出,不能被后端优化卡住。
-
前端输出平滑局部轨迹,后端再慢慢修正全局一致性,是很多工业级 SLAM 系统常见但很重要的设计。
-
cuVSLAM 的价值不在于“提出全新的图优化理论”,而在于把这些模块做成了高效、可部署、可扩展的工程系统。
2. 2D 模块:特征选择、跟踪、关键帧

2D 模块负责图像层面的特征处理。首先,系统将图像划分为不重叠网格,在每个 patch 中基于 Shi-Tomasi “Good Features to Track” 选择高质量角点,从而保证特征点在图像中分布较均匀。然后,系统使用改进版 Lucas-Kanade 光流进行粗到细的金字塔跟踪,并在每次优化时加入 NCC 检查过滤不可靠特征。
当成功跟踪的特征数量低于阈值时,系统创建新的关键帧,并触发局部地图和全局地图更新。在双目和多相机模式下,cuVSLAM 还会执行跨相机特征跟踪,用于后续三角化得到 3D 路标点。
分析:
-
特征选择采用网格化策略,避免特征集中在局部纹理丰富区域。
-
LK 光流 + NCC 检查属于经典但实用的组合,优点是快、稳定、适合 GPU 并行。
-
关键帧策略基于跟踪质量触发,工程上比固定帧率插入关键帧更稳健。
3. 3D 模块:多种视觉里程计模式
Stereo 模式
Stereo 是 cuVSLAM 的默认模式。系统在普通帧中跟踪左目特征,并从局部地图中查询对应 3D landmark,然后通过 PnP 估计当前相机位姿。当需要创建关键帧时,系统执行左右目跨相机跟踪,获得双目观测并进行三角化,随后将位姿、路标点和观测加入局部地图,并触发异步 SBA 优化。
Multi-Stereo 模式
Multi-Stereo 是论文最值得关注的部分之一。当机器人面对单方向弱纹理区域时,例如狭窄走廊、电梯、白墙,单个相机很容易退化。cuVSLAM 的解决方案是使用多个相机从不同方向同时观测环境,通过多视角冗余提升鲁棒性。
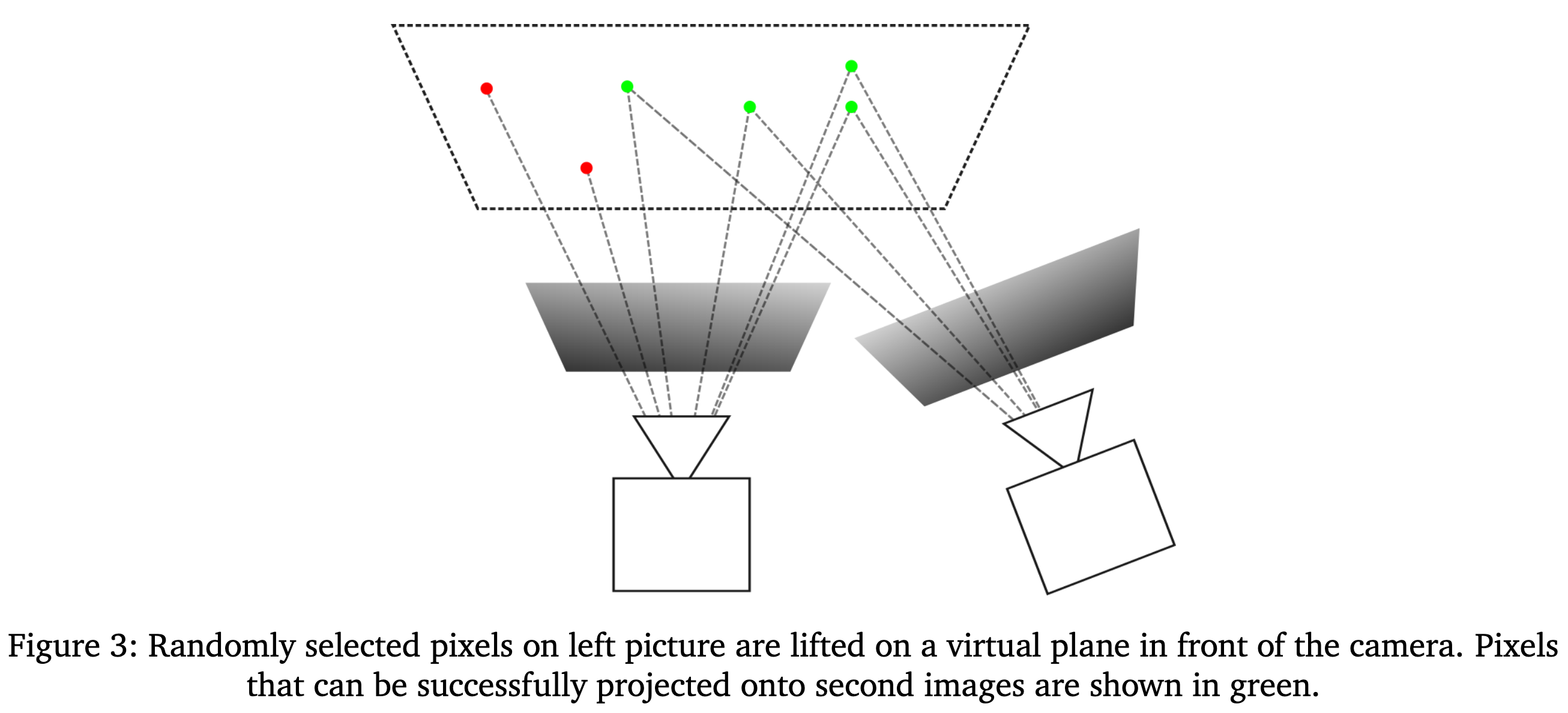
系统启动时会构建 Frustum Intersection Graph。图中的节点是相机,边表示两个相机存在视场重叠,并定义跨相机特征跟踪方向。判断两个相机是否有重叠视场时,系统会在一个相机前方放置虚拟平面,将图像点提升到该平面,再投影到另一个相机中,根据成功投影比例判断是否建立边。
分析:
-
这个设计非常工程化。用户只要给出相机内参和外参,系统就可以自动推断哪些相机之间可以做跨相机跟踪。
-
它把多相机问题抽象成图结构,避免为每种相机排列写死逻辑。
-
多相机不是简单“堆硬件”,关键在于系统能不能利用相机间重叠视场形成稳定约束。
Visual-Inertial 模式
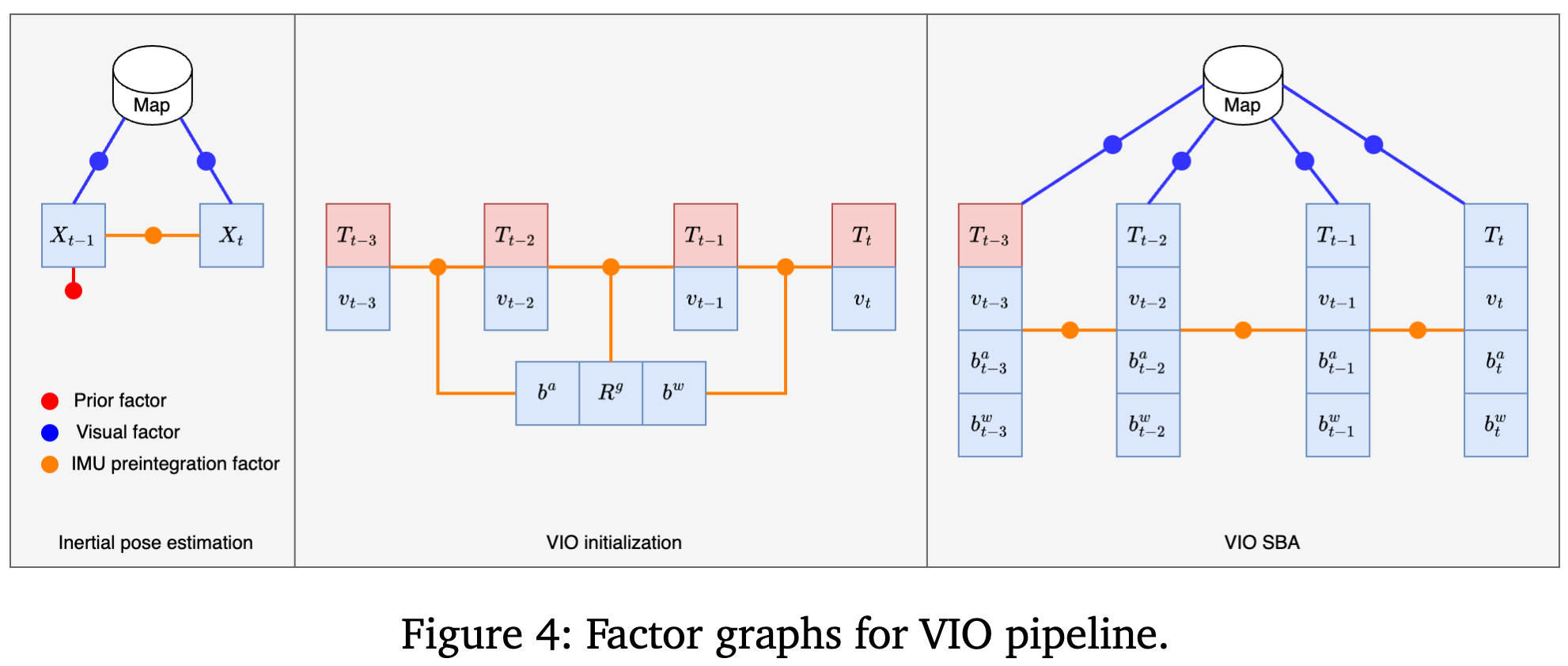
VI 模式借鉴 Forster IMU 预积分和 ORB-SLAM3 等经典视觉惯性方法,将机器人状态定义为 15 维,包括 6DoF 位姿、速度、加速度计 bias、陀螺仪 bias。系统先通过纯视觉位姿估计初始化,再估计重力方向和 IMU bias,之后进行视觉惯性位姿估计和视觉惯性 SBA。
分析:
-
VI 模式的主要价值是增强视觉退化场景下的短时稳定性。
-
对快速运动、光照突变、短时弱纹理场景来说,IMU 可以提供很重要的运动先验。
-
但 IMU 也带来时间同步、标定、bias 建模等工程复杂度。
Mono-Depth 模式
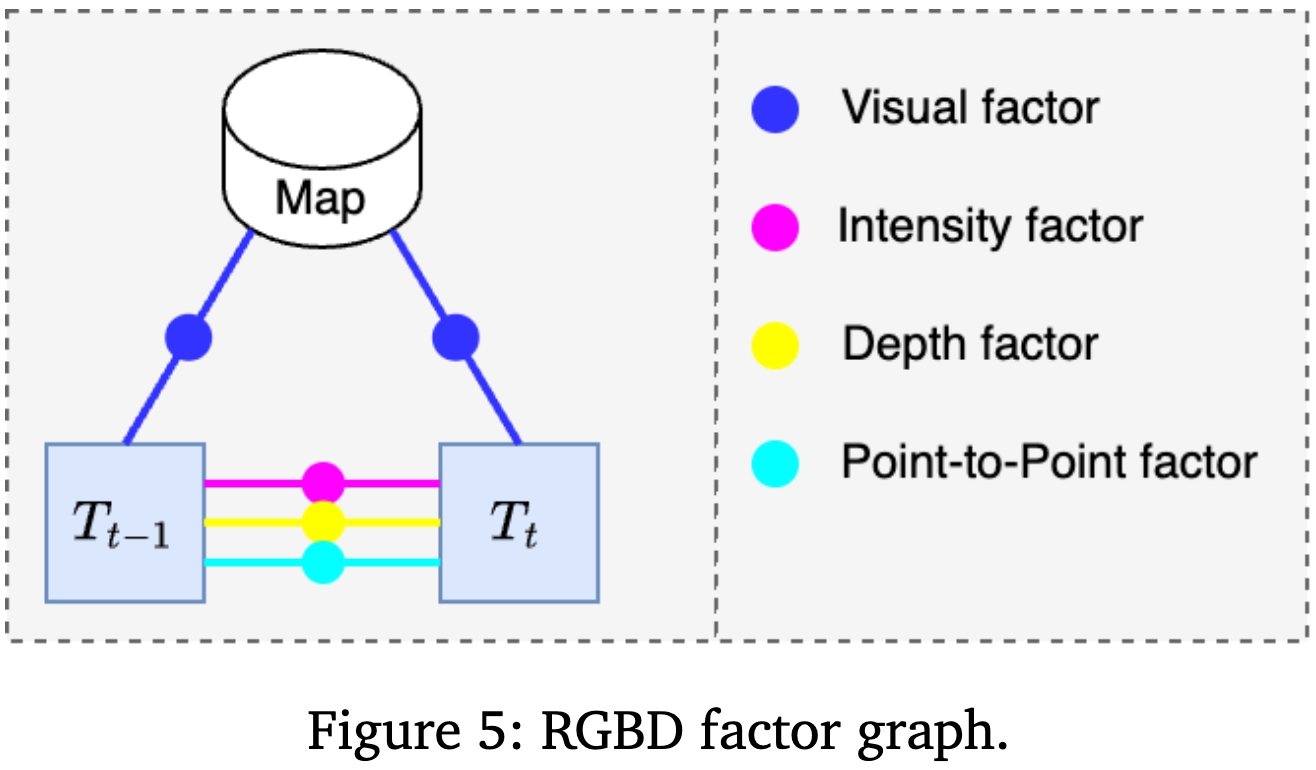
Mono-Depth 模式使用 RGB-D 输入,进行稠密 frame-to-frame 位姿估计。它同时使用视觉重投影误差、稠密强度误差、深度误差和点到点误差,并通过 GPU 上的 LM 优化求解相邻帧之间的 6DoF 变换。
分析:
-
RGB-D 模式对室内近距离机器人很实用,因为深度图直接提供尺度信息。
-
但稠密优化计算量明显更大,后面实验也说明 Mono-Depth 对 GPU 压力更高。
-
深度质量会直接影响跟踪质量,深度缺失、边缘噪声、反光材质都是潜在问题。
Mono 模式
Mono 模式与常规单目 SLAM 类似,先通过 2D 特征跟踪获得跨帧匹配,在第一帧对没有 3D landmark 时通过 Fundamental Matrix 和 RANSAC 估计 up-to-scale 相对位姿,再三角化初始化地图,之后使用 PnP 和 SBA 进行跟踪与优化。
4. 回环检测与全局地图优化
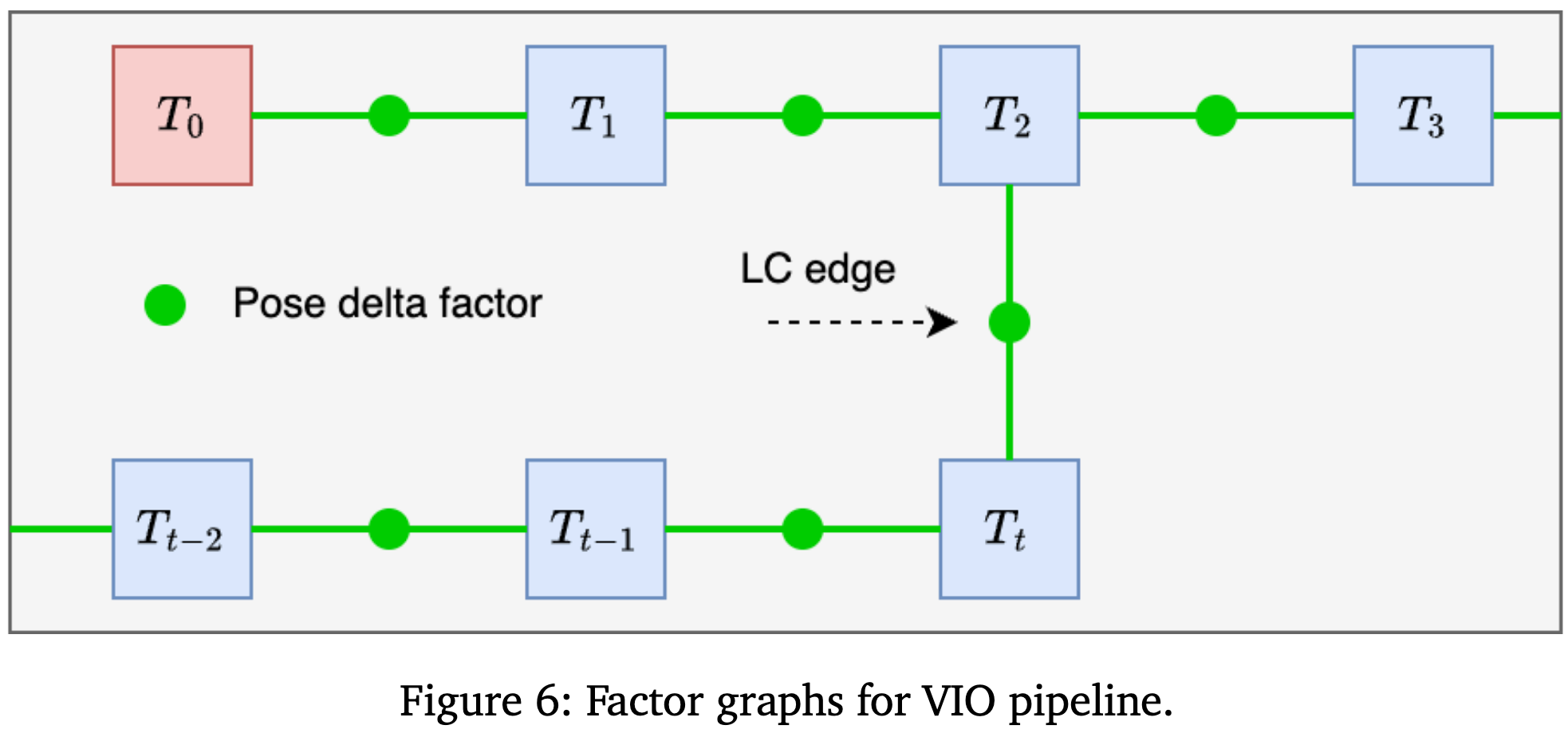
后端模块用于限制全局漂移。系统在关键帧创建时提取视觉特征、整合帧间位姿增量、收集当前可见 landmark,并异步更新全局地图。随后通过 kd-tree 在固定半径内搜索相邻历史位姿,再根据几何可见性和图像 patch 跟踪筛选 landmark,最后估计当前位姿与历史地图位姿之间的相对约束,并执行 Pose Graph Optimization。
分析:
-
cuVSLAM 的回环检测不是只做 BoW 检索,而是结合空间邻近搜索、几何可见性和 landmark 跟踪。
-
多相机系统拥有更大的累计 FoV,因此更容易观测到历史 landmark,提高回环触发概率。
-
后端异步执行,可以保证前端 odometry 输出不会被全局优化干扰。
实验
1. 硬件性能
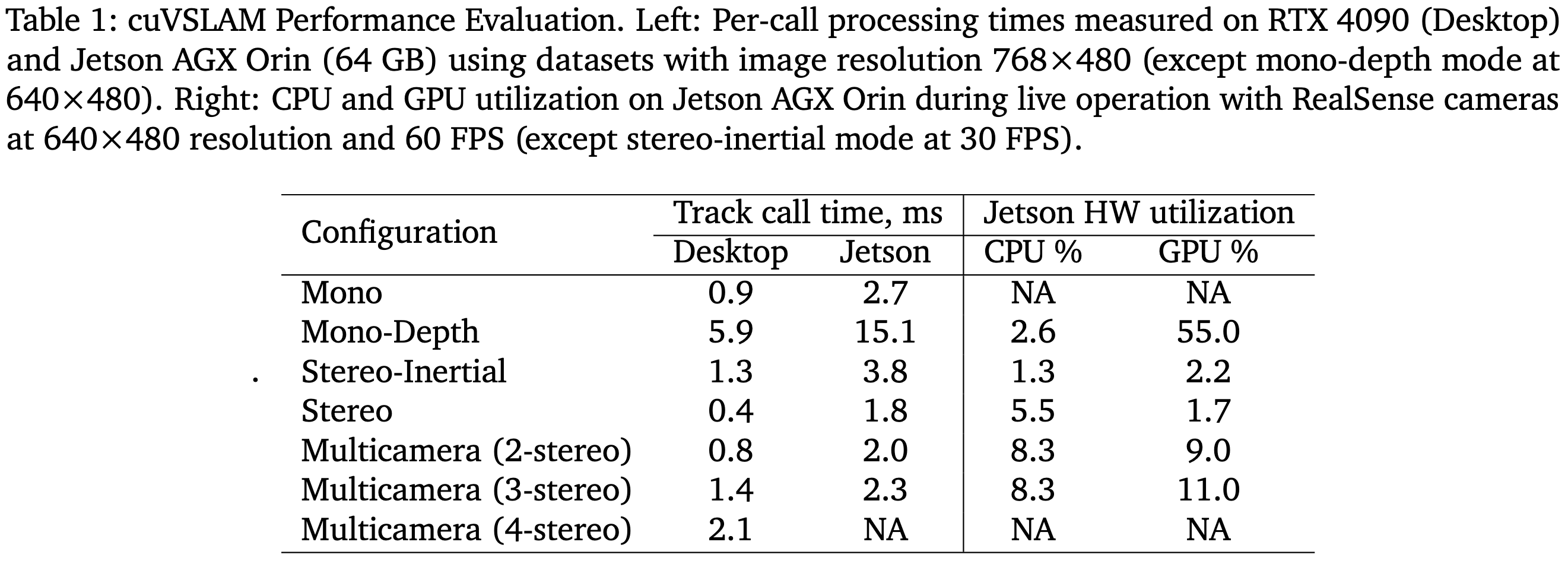
论文在 RTX 4090 桌面平台和 Jetson AGX Orin 上测试了不同模式下的 track call time。在 Jetson AGX Orin 上,Stereo 模式约 1.8ms,Stereo-Inertial 模式约 3.8ms,Mono-Depth 模式约 15.1ms,2-stereo 多相机约 2.0ms,3-stereo 多相机约 2.3ms。可以看到,稀疏特征方案在多相机情况下仍然保持了很低的单帧处理时间,而 Mono-Depth 因为包含稠密优化,计算开销明显更大。
分析:
-
这组数据说明 cuVSLAM 的重点不是“最高精度离线算法”,而是“实时机器人部署”。
-
多相机模式的耗时增长相对温和,说明 CUDA 并行和稀疏特征设计发挥了作用。
-
RGB-D 稠密方法虽然信息更丰富,但在边缘端更容易成为计算瓶颈。
2. Benchmark 结果
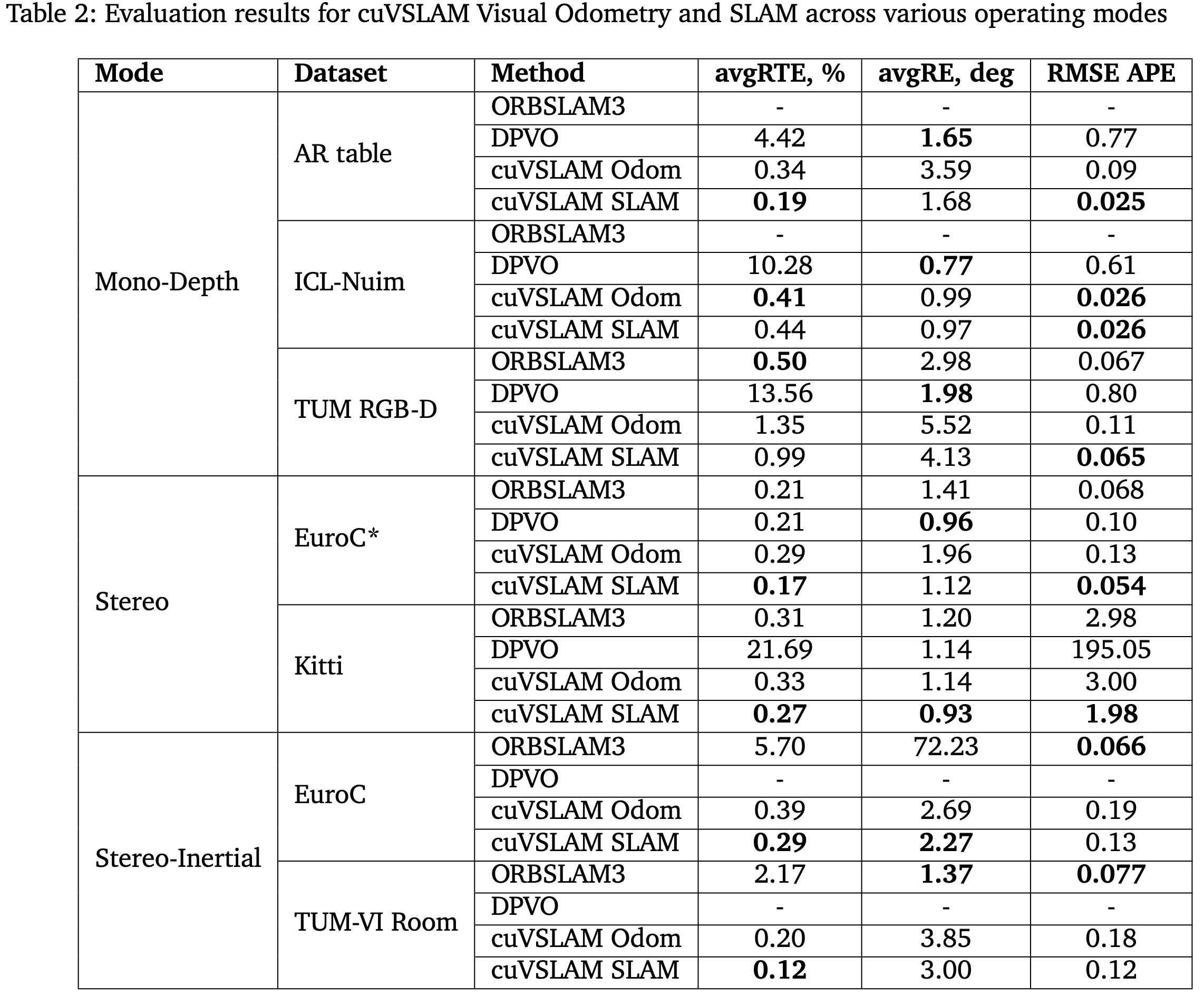
论文在多个公开数据集上比较了 cuVSLAM、ORB-SLAM3 和 DPVO。Stereo 模式下,在 KITTI 数据集上,cuVSLAM SLAM 的 avgRTE 为 0.27%,avgRE 为 0.93 deg,RMSE APE 为 1.98;在 EuRoC Stereo 上,cuVSLAM SLAM 的 RMSE APE 为 0.054。Stereo-Inertial 模式下,cuVSLAM 在 EuRoC 和 TUM-VI Room 上也取得了较稳定的结果。
对于 Mono-Depth,cuVSLAM 在 AR-table 和 ICL-NUIM 上表现很好,例如 AR-table 上 SLAM 的 RMSE APE 为 0.025,ICL-NUIM 上为 0.026;但在 TUM RGB-D 上,结果与 ORB-SLAM3 更接近,说明不同数据集、不同深度质量和场景结构会显著影响 RGB-D 模式表现。
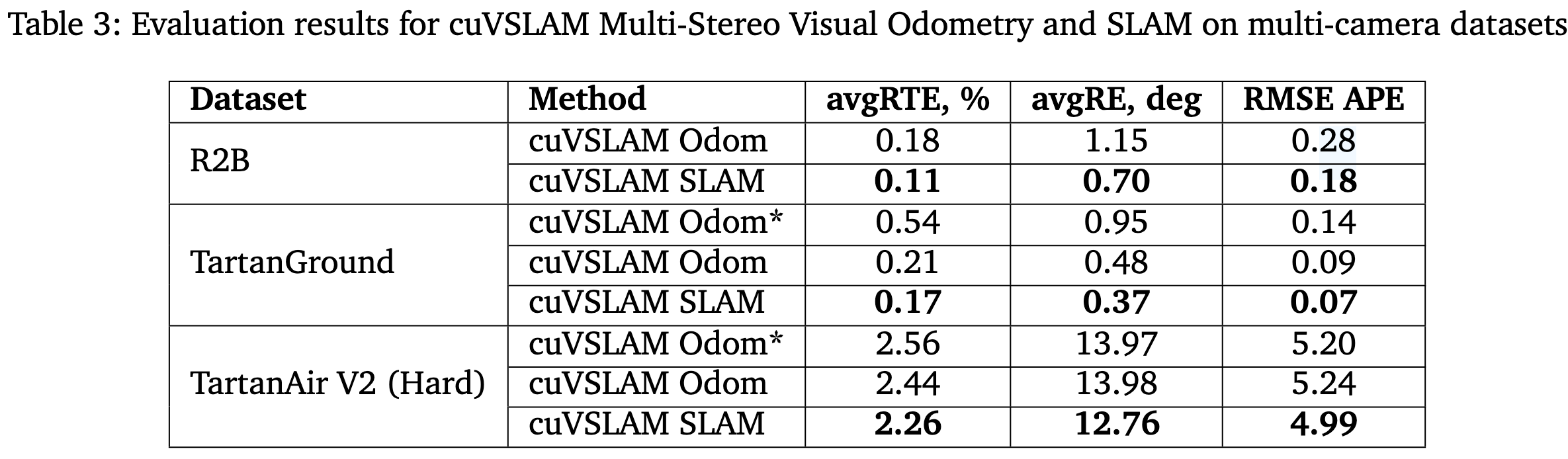
3. Multi-Stereo 结果
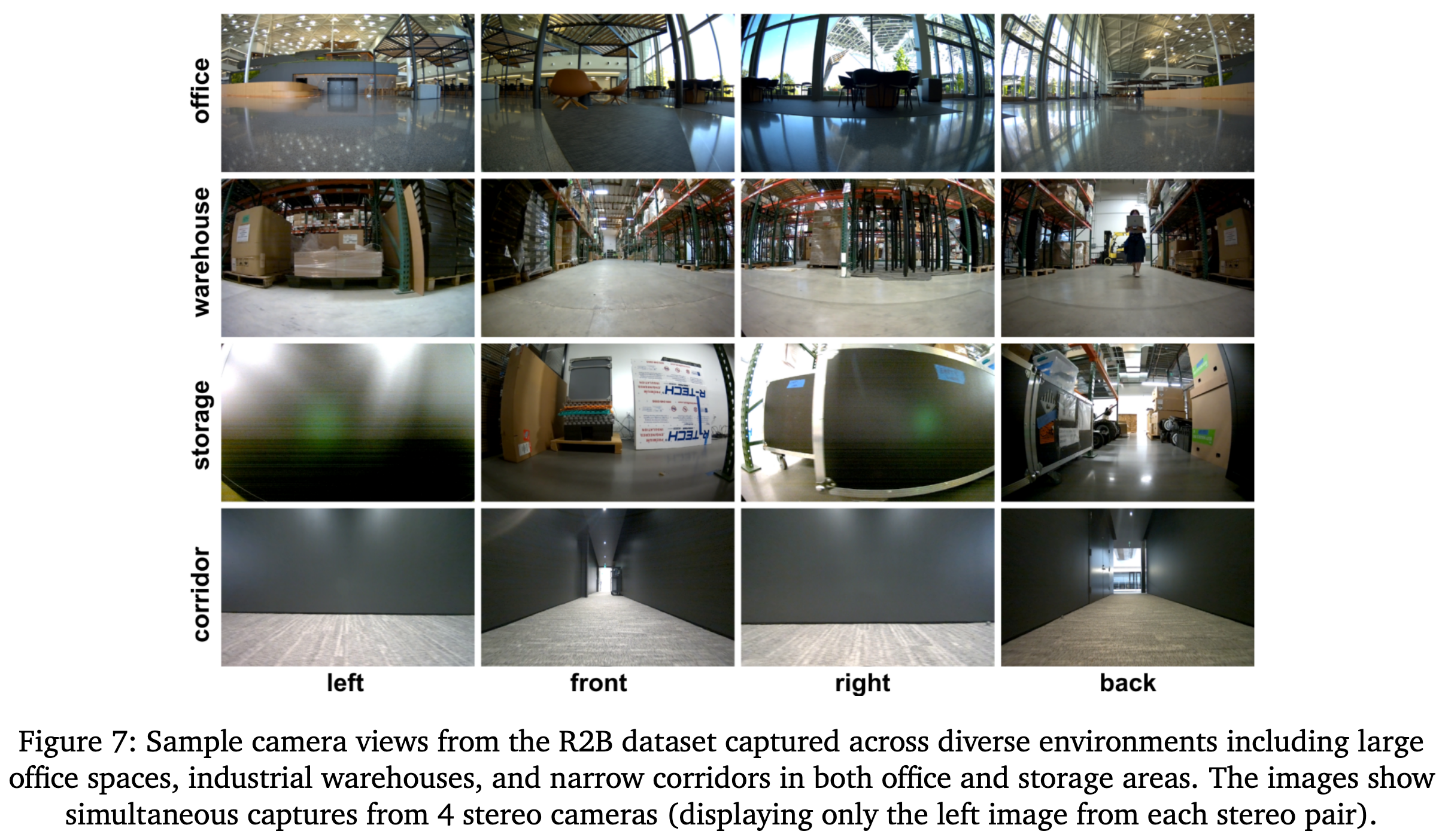
Multi-Stereo 是 cuVSLAM 的重点实验。论文在 R2B、TartanGround 和 TartanAir V2 Hard 上测试 4 个双目相机配置。在 R2B 真实数据上,cuVSLAM Odom 的 avgRTE 为 0.18%,SLAM 降到 0.11%;在 TartanGround 上,Odom 为 0.21%,SLAM 为 0.17%;TartanAir V2 Hard 更具挑战性,SLAM 结果为 2.26% avgRTE 和 12.76 deg avgRE。
分析:
-
R2B 与 TartanGround 结果较好,说明多相机对移动机器人常见场景比较有效。
-
TartanAir V2 Hard 中快速 6DoF 运动和较大角速度会显著增加难度。
-
论文也承认 TartanAir V2 Hard 结果仍有提升空间,这说明多相机不是万能解法,只是提高鲁棒性的有效手段。
4. 遮挡鲁棒性与回环能力
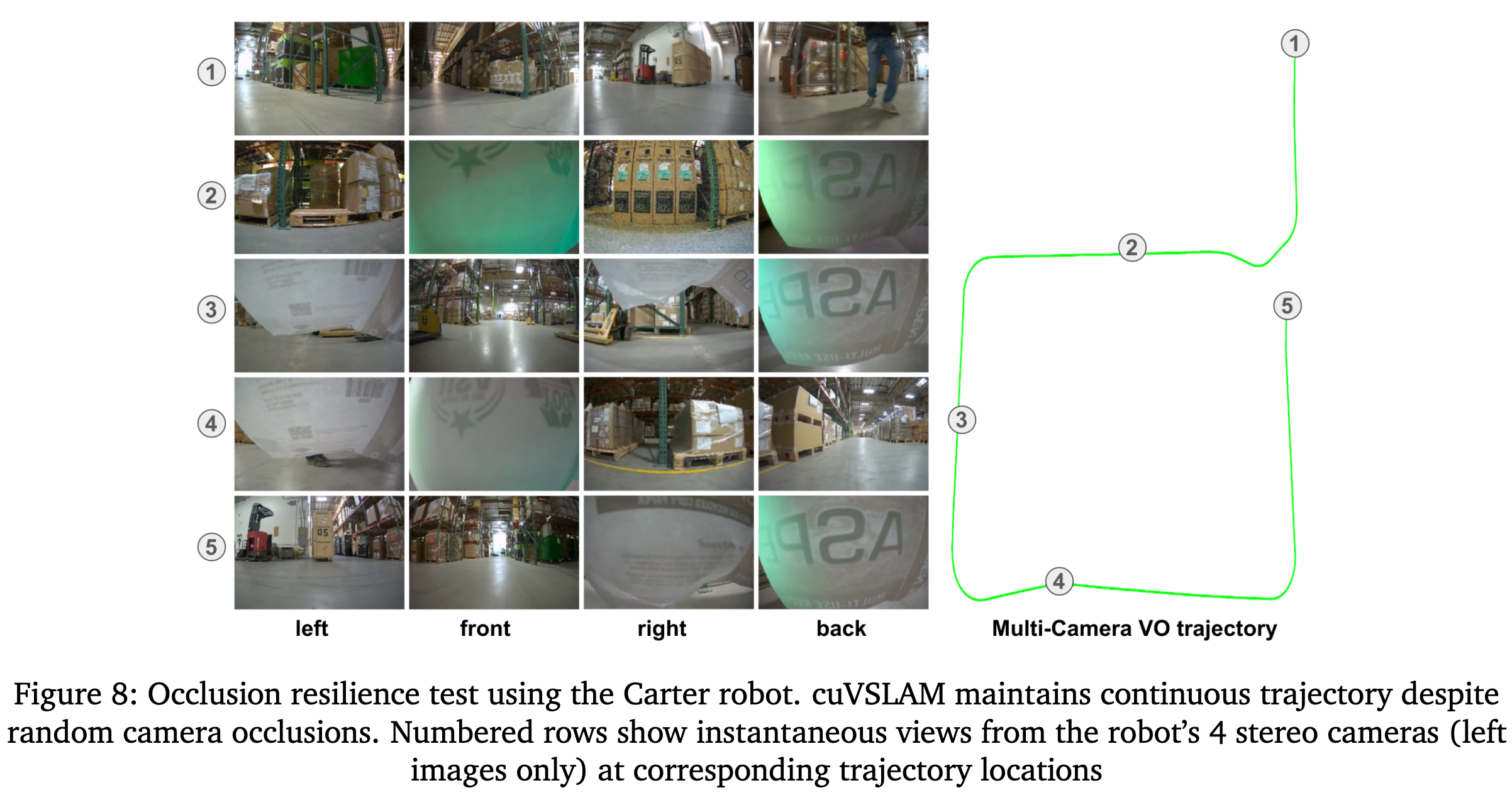
论文做了一个很有意思的遮挡实验:Carter 机器人装备 4 个双目相机,运动过程中随机用不透明膜遮挡部分相机,每次遮挡 20–60 秒,但保证至少一个双目相机未被遮挡。实验结果显示,在严重视觉约束下,cuVSLAM 仍然保持连续轨迹,没有明显跳变或中断。
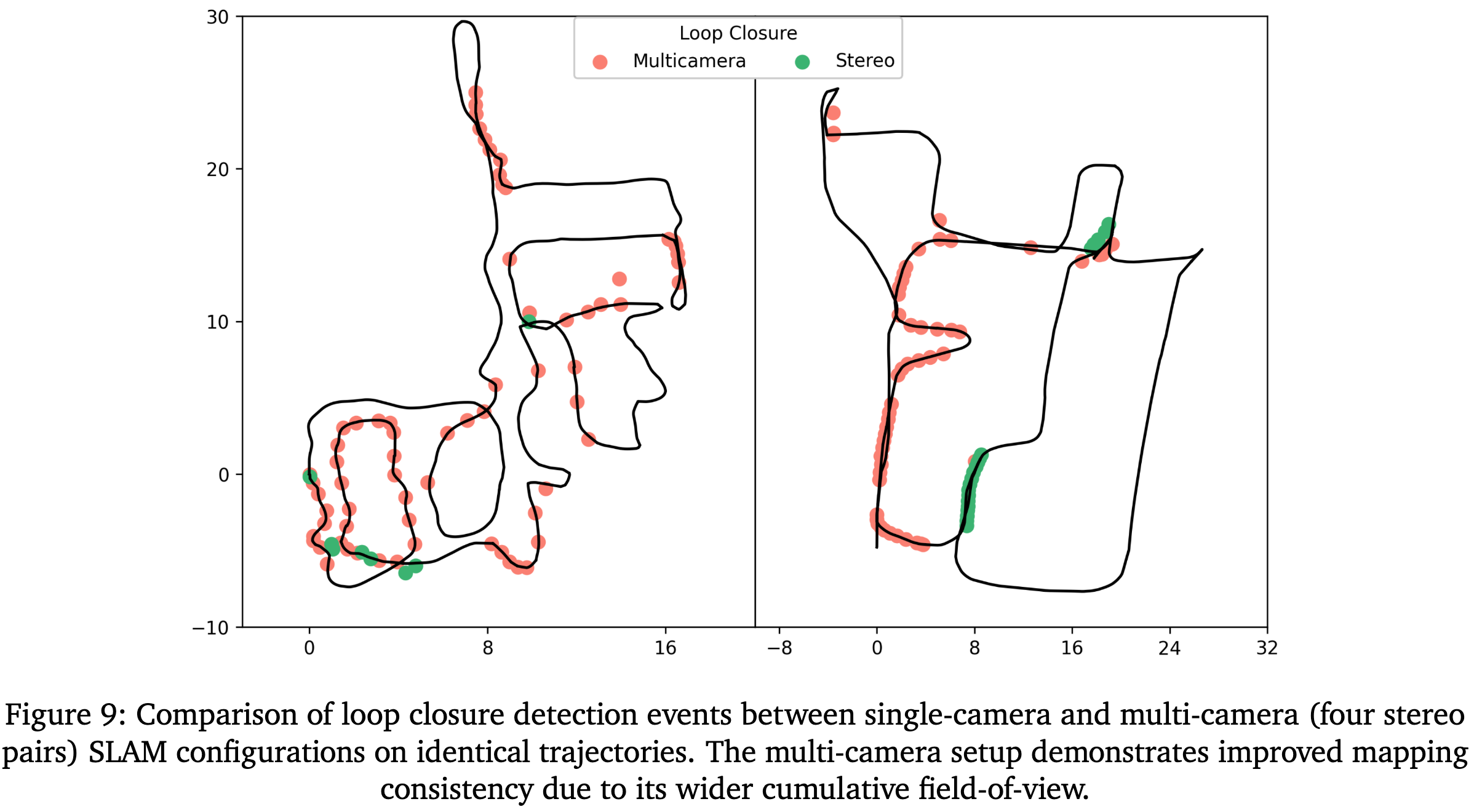
此外,多相机系统因为拥有更大的累计视场,更容易检测到回环。论文对比了单双目和四双目配置在相同轨迹上的回环事件,结果显示多相机配置能触发更多回环,从而带来更频繁的位姿图优化和更好的全局一致性。
创新点与技术亮点
1. 工程系统创新大于单点算法创新
cuVSLAM 的创新并不是提出一种全新的特征、全新的优化理论或全新的网络结构,而是把经典 SLAM 方法系统性地 CUDA 化、模块化、产品化。它的价值更接近“工业级视觉 SLAM 系统报告”,而不是单纯的算法论文。
这一点非常值得注意。很多 SLAM 论文关注某个模块的精度提升,但真实机器人部署时,系统瓶颈往往在同步、标定、延迟、资源占用、异常输入、接口集成等方面。cuVSLAM 的贡献在于把这些问题放到同一个系统里处理。
2. 多相机不是简单扩展,而是系统级设计
Multi-Stereo 的 Frustum Intersection Graph 是本文比较有代表性的设计。它将相机之间的重叠关系建模为图,使系统可以自动决定跨相机跟踪路径。这个思路比固定写死“左-右、前-后”匹配逻辑更通用,也更适合复杂机器人平台。
对于机器人来说,多相机的意义不只是增加视野,还包括:
-
减少单方向弱纹理导致的退化;
-
提高遮挡情况下的可用观测;
-
增加回环检测机会;
-
提高局部位姿估计的几何约束质量。
3. 实时前端与异步后端的工程取舍
cuVSLAM 明确让前端优先保证局部轨迹平滑,而不是每一帧都追求全局一致。回环和 PGO 放在后端异步处理。这个取舍对机器人系统非常关键,因为底盘控制、导航避障、局部规划都更依赖实时稳定的短期 odometry。
4. CUDA 加速贯穿多个模块
论文不是只在某个步骤调用 GPU,而是在特征处理、SBA、RGB-D 优化等多个环节考虑 CUDA 加速。尤其在多相机系统中,如果每个相机都带来额外特征和观测,CPU 很容易成为瓶颈。因此,将稀疏 BA 和图像处理并行化,是系统能够在 Jetson 上运行的关键。
5. 关注真实部署,而不只是 benchmark
论文不仅报告标准数据集结果,还专门分析了 Jetson AGX Orin、Jetson Orin Nano 上的资源占用、回调时间、帧率影响和分辨率影响。官方仓库文档也强调硬件负载、标定、同步、帧率、分辨率、图像质量、运动模糊等因素都会影响 cuVSLAM 性能。
这说明作者非常清楚真实机器人系统中的 SLAM 失败原因往往不是算法公式本身,而是工程链路中的细节。
值得借鉴的地方
1. 前后端职责划分清晰
前端只做实时位姿估计,后端做全局一致性优化。这种结构值得在自己的 SLAM 系统中借鉴,尤其适合需要稳定 odometry 输出的机器人。
2. 多相机建模可以抽象成图问题
Frustum Intersection Graph 的思路很值得借鉴。对于多相机系统,不应简单写死相机关系,而应该根据内外参自动判断视场重叠,形成通用图结构。
3. 系统评测要包含资源占用
论文的实验不仅报告精度,还报告 CPU/GPU 占用、track call time、分辨率影响和帧率影响。这一点对工程系统非常重要。一个 SLAM 系统如果只在离线数据上精度高,但在机器人上跑不满帧率,实际价值会大幅下降。
4. 不同传感器模式共用一套框架
cuVSLAM 支持 Mono、Stereo、RGB-D、VI、Multi-Stereo,这说明系统设计时保留了较好的模块边界。对于实际项目来说,可以先用双目部署,再逐步加 IMU 或多相机,而不是每换一种传感器就重写系统。
5. 弱纹理场景下可以用“视角冗余”提升鲁棒性
很多方法试图通过更强特征、更复杂网络来解决弱纹理问题,而 cuVSLAM 给出的另一条路线是:增加观测视角。对于移动机器人来说,前向相机面对白墙时,侧向或后向相机仍可能看到有效纹理,多视角冗余能显著提升系统容错能力。
局限性与值得商榷的地方
1. 算法新颖性有限,更偏系统工程
cuVSLAM 使用的很多核心算法都是经典方法,例如 Shi-Tomasi 特征、Lucas-Kanade 光流、PnP、三角化、SBA、IMU 预积分、位姿图优化等。论文的主要贡献是工程集成和 CUDA 加速,而不是提出新的数学模型。因此如果从“算法创新”角度看,它的突破性没有一些纯算法论文那么强。
2. 对 NVIDIA 生态依赖较强
cuVSLAM 的核心卖点是 CUDA 加速,这也意味着它天然依赖 NVIDIA GPU 和 Jetson 生态。如果机器人平台使用 CPU-only、AMD GPU 或其他嵌入式计算平台,可迁移性会受到限制。
3. 多相机模式依赖硬件同步和标定质量
论文明确提到 Multi-Stereo 需要同步图像,因为多个相机观测共同参与位姿估计。虽然现代相机可以提供硬件同步,但在实际部署中,多相机硬件同步、外参标定、时间戳一致性、带宽管理都会增加系统复杂度。
4. 多相机真实公开数据验证仍不足
论文使用了 R2B 真实多相机数据集,但这是 NVIDIA 自建的 proprietary dataset。作者也提到,公开真实多相机数据集要么缺少适合双目排列的硬件同步,要么使用软件同步,无法保证同时曝光。
这说明 Multi-Stereo 的真实可复现验证还有一定不足。后续如果能公开更多硬件同步多相机数据集,会更有说服力。
5. Benchmark 对比并非完全公平
论文中 ORB-SLAM3 和 cuVSLAM 会根据数据集使用对应模式,而 DPVO 在所有评估中使用 monocular mode。论文也说明由于 scale correction 是对最终轨迹而不是连续位姿估计进行的,所以某些数据集中的平移指标不一定完全可比,应更多关注相对旋转误差。
因此,实验结果可以说明 cuVSLAM 很强,但不能简单理解为“在所有条件下全面碾压 ORB-SLAM3 或 DPVO”。
6. RGB-D 模式计算压力较大
附录中提到,在 Jetson AGX Orin 上,Mono-Depth 720p 平均 callback time 达到 37.7ms,超过 30 FPS 对应的 33.3ms 帧间隔,导致系统大约跳过一半输入帧。在 Jetson Orin Nano 上,Mono-Depth 30 FPS 稳定运行只在 424×240 最低分辨率下实现,并且仍可能因为采集循环开销导致约 30% 掉帧。
这说明 cuVSLAM 虽然 GPU 加速明显,但稠密 RGB-D 方案在边缘设备上依然需要谨慎选择分辨率和帧率。
7. 动态场景、长期地图维护讨论不够深入
论文主要强调视觉定位、回环和多相机鲁棒性,但对于大规模长期运行中的动态物体、地图老化、语义变化、重复纹理环境下的错误回环等问题讨论较少。对于真正长期部署的服务机器人或仓储机器人,这些仍然是重要问题。
从阅读体验来看,这篇论文更像是一篇 NVIDIA cuVSLAM 技术报告,而不是传统意义上的学术算法论文。它的特点是:
-
公式和模块并不陌生,但系统完整度很高;
-
实验不只看精度,也关注硬件性能;
-
强调 Jetson、ROS2、Python API、C++ API 等真实部署路径;
-
Multi-Stereo 部分很有启发,尤其适合移动机器人弱纹理场景;
-
论文中的一些局限,例如硬件同步、CUDA 依赖、公开多相机数据不足,也很符合真实工程现状。
如果做机器人视觉定位,cuVSLAM 最值得学习的不是某个单独公式,而是它的系统设计思路:经典几何方法 + GPU 加速 + 多传感器适配 + 工程化接口 + 真实硬件评估。
总结
cuVSLAM 是一个面向机器人真实部署的 CUDA 加速视觉 SLAM 系统。它将传统视觉 SLAM 中的特征跟踪、PnP、三角化、SBA、回环检测和位姿图优化等模块进行工程化整合,并通过 CUDA 在边缘设备上实现低延迟运行。相比单点算法创新,本文更突出的价值在于系统级设计,尤其是对多相机视觉定位、异步前后端架构和硬件资源评估的完整考虑。
这篇论文给我的最大启发是:在真实机器人系统中,SLAM 的竞争力并不只取决于算法指标,还取决于能否稳定接入多种传感器、能否实时运行、能否处理遮挡和弱纹理、能否与 ROS2/导航/建图系统集成。cuVSLAM 正是在这些工程问题上给出了一个很强的工业级答案。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐



 13
13 0
0- 0



 已为社区贡献4条内容
已为社区贡献4条内容

所有评论(0)