从"会记录"到"会表达"的STEM教育Robot对比学习
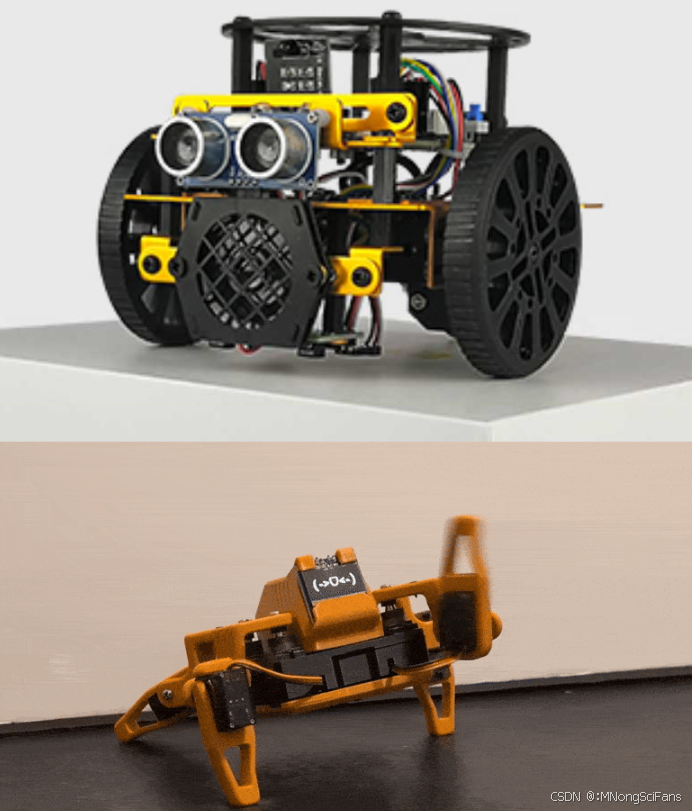
分析对象A: 基于Android原生开发与C51单片机的智能蓝牙小车控制系统
分析对象B: Sesame Robot(开源四足步行机器人,ESP32平台)
分析目标: 归纳对比优缺点 → 评估兼容扩展性 → 设计差异化产品 → 商业化路线图
目录
- 项目基础画像对比
- 技术架构层面对比
- 功能矩阵对比
- 优缺点深度分析
- 兼容扩展性评估
- 差异化融合路径
- 商业化产品设计
- 可执行路线图
- 风险与应对
1. 项目基础画像对比
| 维度 |
论文系统(Android-C51蓝牙小车) |
Sesame Robot |
| 定位 |
本科学士学位毕业设计 / 学术研究 |
开源桌面机器人平台 / Makers社区 |
| MCU平台 |
STC12C5A60S2(51内核, ~33MHz) |
ESP32-S2/S3(双核, 240MHz) |
| MCU成本 |
¥8.5 |
¥15-45 |
| 形态 |
轮式小车(双电机差速驱动) |
四足步行(8舵机,8DOF) |
| 通信方式 |
蓝牙 Classic(HC-06, UART) |
WiFi(AP+STA双模)+ mDNS |
| 通信距离 |
~10m(蓝牙Class 2) |
局域网覆盖(WiFi) |
| 控制终端 |
专用Android原生APP |
任意浏览器(Captive Portal)+ Python工具 |
| 传感器 |
HC-SR04超声波(单点测距) |
无传感器(纯运动控制) |
| 显示交互 |
Android屏幕 |
SSD1306 OLED(128×64, 表情位图) |
| 数据存储 |
SQLite(本地)+ MySQL/Spring Boot(远程) |
无持久化存储 |
| 特色功能 |
运动数据记录与回放 + 时间戳同步 |
表情动画引擎 + 动画作曲工具 |
| 3D结构 |
传统小车底盘(非打印) |
全3D打印外壳(11部件, PLA) |
| PCB设计 |
无(面包板/洞洞板) |
2代Distro Board(EasyEDA设计) |
| 开源状态 |
未明确 |
Apache 2.0 全开源 |
| 文档完善度 |
论文草稿 |
⭐⭐⭐⭐ 14个MD + 建指南 + API文档 |
| 硬件总成本 |
<¥180(~$25) |
$50-60(~¥360-430) |
| 技术成熟度 |
TRL 4(实验室验证) |
TRL 7(Kit商业化 + 社区运营) |
2. 技术架构层面对比
2.1 架构分层对比
论文系统分层 Sesame Robot 分层
┌─────────────────┐ ┌──────────────────┐
│ Android APP │ 应用层 │ Web Browser │
│ (Activity/ │ │ Captive Portal │
│ Service) │ ├──────────────────┤
├─────────────────┤ │ Python Companion │
│ Bluetooth API │ 通信层 │ JSON REST API │
│ (SPP/BLE) │ ├──────────────────┤
├─────────────────┤ │ ESP32 固件 │
│ C51 固件 │ 固件层 │ (Arduino C++) │
│ (Keil C) │ │ WiFi+HTTP+PWM │
├─────────────────┤ ├──────────────────┤
│ HC-06 + L298N │ 硬件层 │ 8×MG90S + OLED │
│ + HC-SR04 │ │ + Distro Board │
└─────────────────┘ └──────────────────┘
关键差异:
- 论文的Android层是独立重客户端,Sesame用浏览器/Python轻客户端
- 论文的通信栈是蓝牙单通道,Sesame是WiFi多协议(HTTP/JSON/mDNS)
- 论文固件是裸机前后台,Sesame也是单核事件循环但架构更模块化
2.2 通信协议对比
| 维度 |
论文协议 |
Sesame协议 |
| 物理层 |
Bluetooth SPP (2.4GHz) |
WiFi 802.11n (2.4GHz) |
| 数据帧 |
0x55AA头 + 指令码 + 参数 + CRC16校验 |
HTTP GET/POST + JSON body |
| 指令集 |
前进/后退/左转/右转/停止/速度档位/舵机 |
17种动作 + 表情切换 + 独立舵机角度 |
| 响应机制 |
状态机解析 + 轮询确认 |
HTTP response + JSON status |
| 实时性 |
目标<0.3s, 实测9.8±0.7ms |
未量化, 依赖WiFi延迟 |
| 可靠性 |
CRC16校验 + 丢包<0.18% |
TCP原生可靠传输 |
| 带宽 |
~4Mbps(蓝牙理论) |
数十Mbps(WiFi实际) |
| 安全性 |
无加密(蓝牙配对基础上) |
AP密码 + 局域网隔离 |
2.3 运动控制算法对比
论文系统(差速转向) Sesame Robot(四足步态)
┌──────────────────┐ ┌──────────────────────┐
│ 直线:两轮同速 │ │ 步行:交替三角步态 │
│ 左转:左轮减速/反转│ │ 8舵机协调角度序列 │
│ 右转:右轮减速/反转│ │ 髋关节(L1/L2/R1/R2) │
│ 停止:两轮刹车 │ │ 膝关节(L3/L4/R3/R4) │
│ │ │ servoPins[8]直接映射 │
│ PWM占空比→速度 │ │ 帧延迟可配(50-200ms) │
│ 无闭环反馈 │ │ Subtrim微调校准 │
└──────────────────┘ └──────────────────────┘
论文系统没有实现PID闭环控制(论文附件中的STM32避障系统有PID但非主论文系统),Sesame同样没有传感器反馈,两者都是开环控制。但是:
- 论文论文附件中STM32部分展示了PID速度闭环 + 编码器反馈的设计思路
- Sesame仅有舵机角度开环,完全没有位置/速度反馈
3. 功能矩阵对比
| 功能域 |
论文系统 |
Sesame Robot |
差距分析 |
| 基础运动 |
前进/后退/左转/右转/停止 |
✅ 17种预设动作 + 持续/单次模式 |
Sesame更多样 |
| 速度控制 |
多档速度(PWM占空比) |
walkCycles + frameDelay间接控制 |
论文更精确 |
| 独立舵机/电机 |
未实现独立控制 |
✅ 8舵机独立角度0-180° |
Sesame独有 |
| 校准功能 |
无 |
✅ Subtrim微调(-90°~+90°) |
Sesame独有 |
| 表情/显示 |
Android屏幕UI展示 |
✅ 40+表情 + 3种动画模式 |
不同维度 |
| 传感器 |
✅ HC-SR04超声波测距 |
❌ 无传感器 |
论文独有 |
| IMU/姿态 |
未实现(STM32附件有MPU6050) |
❌ 无IMU |
均缺失 |
| 数据记录 |
✅ SQLite本地 + MySQL远程 |
❌ 无任何持久化 |
论文核心优势 |
| 运动回放 |
✅ 时间戳同步回放算法 |
❌ 无回放 |
论文核心优势 |
| 远程API |
Spring Boot REST(设计中) |
✅ ESP32内嵌REST API |
Sesame成熟 |
| 本地Web UI |
无 |
✅ Captive Portal深色主题 |
Sesame独有 |
| 桌面工具 |
无 |
✅ Sesame Studio动画作曲 |
Sesame独有 |
| 多机控制 |
未实现 |
❌ 无 |
均缺失 |
| 语音控制 |
未实现 |
❌ 无 |
均缺失 |
| 自动避障 |
❌(论文有提及但未实现) |
❌ 无 |
论文方向 |
| OTA升级 |
无 |
❌ 无 |
均缺失 |
| Mesh组网 |
无 |
❌ 无 |
均缺失 |
4. 优缺点深度分析
4.1 论文系统的优势
| 优势点 |
详述 |
价值评分 |
| 运动数据记录与回放 |
这是论文最核心的创新点。通过时间戳+距离值的结构化记录,实现运动轨迹的精确回放,带时间同步补偿算法 |
⭐⭐⭐⭐⭐ |
| 双层数据存储架构 |
SQLite本地存储 + Spring Boot远程MySQL,具备生产级数据管理能力 |
⭐⭐⭐⭐⭐ |
| 成本极低 |
MCU ¥8.5,整机<¥180,约为Sesame的1/3 |
⭐⭐⭐⭐ |
| 专用移动APP |
Android原生开发,非Web套壳,体验更原生、离线可用 |
⭐⭐⭐⭐ |
| 完整的学术方法论 |
从需求分析→系统设计→测试验证的完整工程流程 |
⭐⭐⭐ |
| 协议设计学术化 |
帧结构、CRC校验、状态机解析、量化延迟测试 |
⭐⭐⭐⭐ |
4.2 论文系统的劣势
| 劣势点 |
详述 |
严重性 |
| MCU性能瓶颈 |
C51 @33MHz,无法运行复杂算法(逆运动学/AI推理) |
🔴 高 |
| 蓝牙通信距离受限 |
~10m,无法远程控制 |
🔴 高 |
| 无表情/显示交互 |
缺乏拟人化交互,用户体验单一 |
🟡 中 |
| 硬件集成度低 |
面包板接线,无可复用的PCB设计 |
🟡 中 |
| 无开源生态 |
学术论文模式,无社区贡献、Issue跟踪、版本管理 |
🟡 中 |
| 依赖特定Android设备 |
非跨平台(无iOS/Web支持) |
🟡 中 |
4.3 Sesame Robot的优势
| 优势点 |
详述 |
价值评分 |
| 表情交互能力 |
40+表情位图 + talk_变体 + 3种动画模式,极具人格化 |
⭐⭐⭐⭐⭐ |
| 网络原生架构 |
WiFi双模 + mDNS + JSON API,天然适配IoT云服务 |
⭐⭐⭐⭐⭐ |
| 工程化成熟度 |
完整PCB设计(2代)、3D打印11部件、建造指南、接线图 |
⭐⭐⭐⭐⭐ |
| 模块化固件架构 |
X-Macro表情注册、非阻塞控制流、三板抽象层 |
⭐⭐⭐⭐ |
| 动画作曲工具 |
Sesame Studio可视化编排,C++代码自动生成 |
⭐⭐⭐⭐ |
| 开源社区运营 |
Discord + YouTube + PCBway赞助 + Build Kit销售 |
⭐⭐⭐⭐ |
| 文档完善度 |
14个MD文档,总计1786行,覆盖建造/接线/API/PCB |
⭐⭐⭐⭐ |
4.4 Sesame Robot的劣势
| 劣势点 |
详述 |
严重性 |
| 无传感器 |
完全无环境感知能力(无超声波/IMU/摄像头) |
🔴 高 |
| 无数据存储 |
每次重启丢失所有配置和状态 |
🔴 高 |
| 无运动回放 |
无法记录和复现动作序列 |
🟡 中 |
| 无移动APP |
仅Web界面,无原生移动端体验 |
🟡 中 |
| 开环控制 |
无编码器/位置反馈,无法保证运动精度 |
🟡 中 |
| 成本较高 |
$50-60 vs 论文<¥180,价差约2.5倍 |
🟡 中 |
| ESP32Servo库锁定 |
v3.0.9有bug但无法升级(新版多通道泄漏) |
🟡 中 |
| 无身份认证 |
API无认证机制,仅靠局域网隔离 |
🟢 低 |
5. 兼容扩展性评估
5.1 论文系统 → Sesame 的能力迁移矩阵
| 论文系统能力 |
迁移到Sesame的可行性 |
技术方案 |
工作量 |
| 超声波测距 |
✅ 高 |
ESP32 GPIO + HC-SR04库,I2C/GPIO均有富余 |
1日 |
| 运动数据记录 |
✅ 高 |
ESP32 SPIFFS/LittleFS本地存储 + NTP时间戳 |
3日 |
| 运动回放算法 |
✅ 高 |
时间戳同步 + 舵机角度序列重放 |
3日 |
| Android APP控制 |
✅ 高 |
WiFi Socket → ESP32 HTTP API,替代蓝牙 |
5日 |
| Spring Boot后端 |
✅ 高 |
ESP32 HTTP POST → 云端数据库 |
3日 |
| 蓝牙通信 |
⚠️ 中 |
ESP32支持BLE,但需重构整个通信栈 |
10日 |
| PID闭环控制 |
⚠️ 中 |
需添加编码器硬件 + 中断处理 |
7日 |
5.2 Sesame → 论文系统的能力迁移矩阵
| Sesame能力 |
迁移到C51的可行性 |
原因 |
| WiFi联网 |
❌ 不可行 |
C51无WiFi模块,外挂ESP8266可但增加复杂度 |
| JSON REST API |
❌ 不可行 |
C51内存不足以运行HTTP Server + JSON解析 |
| OLED表情 |
⚠️ 勉强 |
C51可驱动SSD1306但位图存储耗尽Flash |
| 3D打印外壳 |
✅ 可借鉴 |
设计理念通用,但论文是轮式非四足 |
| Captive Portal |
❌ 不可行 |
C51无法运行Web Server |
| 多舵机控制 |
⚠️ 勉强 |
C51定时器资源有限,8舵机PWM有挑战 |
5.3 融合架构可行性评估
结论:以Sesame(ESP32)为基础平台,注入论文系统的数据能力,是最优融合路径。
融合架构
┌─────────────────────────────────────────────────────┐
│ 控制终端层 │
│ ┌──────────┐ ┌──────────┐ ┌──────────────────┐ │
│ │ Web UI │ │ Android │ │ Python/CLI工具 │ │
│ │(Captive) │ │ Native │ │ (Sesame Studio+) │ │
│ └────┬─────┘ └────┬─────┘ └────────┬─────────┘ │
│ └──────────────┼───────────────┘ │
│ │ WiFi/HTTP/WebSocket │
├──────────────────────┼──────────────────────────────┤
│ ESP32 融合固件层 │
│ ┌──────────────────┴───────────────────────────┐ │
│ │ 来自Sesame: │ │
│ │ ✅ 8舵机运动控制 (movement-sequences) │ │
│ │ ✅ 40+表情引擎 (face-bitmaps + animation) │ │
│ │ ✅ WiFi双模 + HTTP/JSON API │ │
│ │ ✅ Captive Portal Web UI │ │
│ │ ✅ Subtrim校准 │ │
│ │ │ │
│ │ 来自论文: │ │
│ │ 🆕 超声波测距 (HC-SR04驱动) │ │
│ │ 🆕 运动数据记录 (SPIFFS + 时间戳) │ │
│ │ 🆕 运动回放引擎 (序列重放 + 时间同步) │ │
│ │ 🆕 传感器数据上报 (HTTP POST → 云端) │ │
│ │ │ │
│ │ 新增能力: │ │
│ │ 🆕 BLE蓝牙控制 (ESP32内置, 双模共存) │ │
│ │ 🆕 避障模式 (超声波反馈 → 动作选择) │ │
│ │ 🆕 IMU姿态感知 (可选MPU6050) │ │
│ │ 🆕 NVS持久化配置 (WiFi/校准/设置) │ │
│ └───────────────────────────────────────────────┘ │
│ │ │
│ ┌───────────────────┴──────────────────────────┐ │
│ │ 云后台 (新增) │ │
│ │ Spring Boot + MySQL (借鉴论文设计) │ │
│ │ ✅ 运动记录云存储与分享 │ │
│ │ ✅ 表情/动作市场 (UGC社区) │ │
│ │ ✅ 设备管理与OTA │ │
│ │ ✅ 学习数据分析 (教育场景) │ │
│ └──────────────────────────────────────────────┘ │
└─────────────────────────────────────────────────────┘
6. 差异化融合路径
6.1 核心竞争力定位
当前市场竞品格局:
| 竞品 |
定位 |
价格 |
表情 |
回放 |
移动APP |
传感器 |
开源 |
| Petoi Bittle |
开源四足狗 |
$259 |
❌ |
❌ |
✅ |
IMU |
✅ |
| Otto DIY |
开源双足 |
~$50 |
LED矩阵 |
❌ |
❌ |
超声波 |
✅ |
| mBot |
STEM教育 |
¥499 |
❌ |
❌ |
✅ |
超声波+巡线 |
部分 |
| Sesame |
开源四足 |
$50-60 |
✅ OLED |
❌ |
❌ |
❌ |
✅ |
| Sesame Fusion(融合产品) |
表情+感知+回放+教育 |
¥299-499 |
✅ OLED |
✅ |
✅ |
✅ 超声波+IMU |
✅ |
融合产品的差异化三角:
表情交互
/ \
/ \
/ 核心 \
/ 差异化 \
/ 产品定位 \
/ \
数据回放 ──────────── 环境感知
(记录+重放) (超声波+IMU)
6.2 具体差异化特性清单
| 特性 |
来源 |
竞争壁垒 |
实现难度 |
| 表情+动作联动 |
Sesame |
已有,竞争对手无OLED表情 |
⭐ |
| "教-学-回放"模式 |
论文 |
手动编排动作 → 机器人记录 → 精确回放,教育场景刚需 |
⭐⭐⭐ |
| Android原生APP |
论文 |
专业移动体验,离线可用,非Web套壳 |
⭐⭐⭐ |
| 云动作市场 |
融合创新 |
UGC生态,社区共享表情包/动作序列 |
⭐⭐⭐⭐ |
| 环境感知避障 |
论文方向 |
超声波+IMU融合,智能避障 |
⭐⭐ |
| 双模通信(WiFi + BLE) |
ESP32原生 |
远程控制 + 近场低功耗,业界罕有 |
⭐⭐ |
| OTA在线升级 |
新增 |
固件远程更新,降低维护成本 |
⭐⭐ |
| STEM课程体系 |
融合创新 |
从组装→编程→AI的完整教育路径 |
⭐⭐⭐⭐ |
6.3 "教-学-回放"创新模式详解
这是论文系统最强能力与Sesame最缺能力的最优结合点:
教学模式工作流:
┌──────────┐ ┌──────────┐ ┌──────────┐ ┌──────────┐
│ 1. 示教 │ → │ 2. 记录 │ → │ 3. 回放 │ → │ 4. 分享 │
│ 手动摆姿势 │ │ 时间戳+ │ │ 精确复现 │ │ 上传云端 │
│ 或遥控操作 │ │ 角度序列 │ │ 动作序列 │ │ 社区共享 │
└──────────┘ └──────────┘ └──────────┘ └──────────┘
应用场景:
- STEM编程教学:学生编程→记录→对比标准答案
- 机器人舞蹈:编舞→记录→批量复现(多机同步表演)
- 康复训练:治疗师示教→患者回放训练
- 工业培训:熟练工操作记录→新员工回放学习
7. 商业化产品设计
7.1 产品定位:Sesame Edu(芝麻教育机器人)
目标市场:中国STEM教育市场(2025年预计规模¥800亿+)
核心用户:8-16岁青少年 + 编程教育机构 + 高校实验室
核心卖点:会"学"你动作的表情机器人
价格区间:标准版 ¥299 / Pro版 ¥499
7.2 产品版本矩阵
| 特性 |
标准版 (¥299) |
Pro版 (¥499) |
机构版 (¥899/套) |
| 四足8DOF + OLED表情 |
✅ |
✅ |
✅ |
| Web控制 + Captive Portal |
✅ |
✅ |
✅ |
| Wi-Fi + BLE双模 |
✅ |
✅ |
✅ |
| 超声波避障 |
✅ |
✅ |
✅ |
| 运动数据记录与回放 |
✅ |
✅ |
✅ |
| Android/iOS原生APP |
✅ |
✅ |
✅ |
| IMU姿态传感器 |
❌ |
✅ |
✅ |
| 摄像头模块 |
❌ |
✅ |
✅ |
| 语音识别(离线) |
❌ |
✅ |
✅ |
| 云动作市场 |
❌ |
✅ |
✅ |
| 课程体系(48课时) |
❌ |
❌ |
✅ |
| 批量管理后台 |
❌ |
❌ |
✅ |
| 教师培训 |
❌ |
❌ |
✅ |
7.3 商业模式
收入结构预测(年营收目标:¥500万 / Year 1)
┌────────────────────────────────────┐
│ 硬件销售 60% ¥300万 │
│ ├─ 标准版 × 5000台 │
│ └─ Pro版 × 2000台 │
├────────────────────────────────────┤
│ 课程+机构授权 25% ¥125万 │
│ ├─ 机构版套装 × 200套 │
│ └─ 课程授权年费 │
├────────────────────────────────────┤
│ 云服务(SaaS) 10% ¥50万 │
│ ├─ Pro会员 ¥9.9/月 │
│ └─ 机构版 ¥99/月 │
├────────────────────────────────────┤
│ 配件+耗材 5% ¥25万 │
│ └─ 3D打印外壳/舵机/电池 │
└────────────────────────────────────┘
7.4 与Sesame原项目的商业关系
Sesame原项目(Apache 2.0)
│
├── 上游贡献(保持开源)
│ ├── 传感器驱动层开源
│ ├── 数据记录模块开源
│ └── BLE蓝牙栈开源
│
└── 商业化分支(Sesame Edu)
├── Android/iOS APP(闭源)
├── 云服务后端(闭源SaaS)
├── 课程体系(版权保护)
├── 工业设计(外观专利)
└── 品牌化(商标注册)
合规性:Apache 2.0协议允许商用,只需保留版权声明。商业化分支只需对闭源部分独立授权即可。
8. 可执行路线图
Phase 1:技术融合验证(6周)
Week 1-2: 硬件适配
├── HC-SR04驱动集成到ESP32
├── MPU6050 I2C驱动(可选)
├── 超声波安装位3D设计(修改Top Cover)
└── 成本核算
Week 3-4: 数据记录系统
├── SPIFFS/LittleFS存储层
├── 运动记录数据模型(时间戳+8舵机角度)
├── 记录/停止/清除 API端点
└── NVS配置持久化
Week 5-6: 回放引擎
├── 时间戳同步回放算法(借鉴论文)
├── 回放速度控制(0.5x/1x/2x)
├── 回放API端点
└── Web UI回放控制面板
Phase 2:产品化打磨(8周)
Week 7-10: Android APP
├── Kotlin + Jetpack Compose
├── WiFi直连ESP32 HTTP API
├── BLE近场控制(双模)
├── 动作录制UI + 回放管理
└── 表情选择器 + 实时预览
Week 11-14: 工业设计
├── 外壳迭代(Pro版美学升级)
├── 包装设计
├── 快拆电池仓设计
└── 量产BOM优化(目标成本¥85-120)
Phase 3:云服务(6周)
Week 15-17: 云后台
├── Spring Boot 3.2 + MySQL 8
├── 用户系统 + 设备绑定
├── 动作/表情上传下载API
└── 管理后台
Week 18-20: 动作市场
├── 社区分享功能
├── 点赞/收藏/评论
├── 排行榜/推荐
└── 内容审核
Phase 4:教育内容(持续)
Week 21+: 课程体系
├── 入门课:组装+基础控制(8课时)
├── 进阶课:动作编程+回放(16课时)
├── 高阶课:传感器+避障算法(16课时)
└── 竞赛课:机器人舞蹈大赛(8课时)
9. 风险与应对
| 风险 |
概率 |
影响 |
应对策略 |
| 论文系统无法完整复现 |
中 |
高 |
论文是草稿状态,代码不完整。以设计思想为参考,独立实现而非直接移植 |
| Sesame社区不接受商业化 |
低 |
中 |
Apache 2.0完全允许商用;保持对上游贡献;品牌独立运营 |
| STEM市场竞争激烈 |
高 |
中 |
用"表情交互+记录回放"做差异化,避免跟大疆/mBot正面竞争 |
| ESP32芯片供应不稳定 |
中 |
高 |
提前备货;评估ESP32-C3/C6替代方案;保留S2 Mini手工方案为降级路径 |
| Android/iOS开发成本高 |
高 |
中 |
先用Flutter跨平台降低初期投入;MVP阶段Web UI为主 |
| 3D打印量产效率低 |
中 |
中 |
初期用3D打印+注塑模具并行;量>5000转全注塑 |
| 云服务运维成本 |
低 |
低 |
初期用阿里云/腾讯云轻量服务器,月成本<¥500 |
| 知识产权风险 |
低 |
中 |
Apache 2.0合规检查;"芝麻"品牌独立注册;外观专利提前申请 |
10. 总结评估
核心结论
| 维度 |
论文系统 |
Sesame Robot |
融合产品 |
| 技术完整度 |
⭐⭐ |
⭐⭐⭐⭐ |
⭐⭐⭐⭐⭐ |
| 产品化成熟度 |
⭐ |
⭐⭐⭐⭐ |
⭐⭐⭐⭐⭐ |
| 差异化竞争力 |
⭐⭐⭐ |
⭐⭐⭐ |
⭐⭐⭐⭐⭐ |
| 商业化可行性 |
⭐ |
⭐⭐⭐ |
⭐⭐⭐⭐ |
| 教育场景适配 |
⭐⭐ |
⭐⭐⭐ |
⭐⭐⭐⭐⭐ |
| 生态系统潜力 |
⭐ |
⭐⭐⭐ |
⭐⭐⭐⭐⭐ |
一句话总结
论文系统提供了"会记录"的大脑,Sesame提供了"会表达"的身体——二者的融合在STEM教育机器人赛道上创造了一个兼具"情感交互+数据智能"的独特品类,核心差异化武器是"教-学-回放"闭环。
下一步行动建议
- 立即验证:ESP32 + HC-SR04超声波驱动 + SPIFFS存储(1-2天出demo)
- 原型迭代:基于Sesame固件,添加记录/回放API端点(1周)
- 市场测试:Kickstarter/国内众筹验证需求(Phase 2完成后)
- 团队组建:嵌入式1人 + Android 1人 + 工业设计1人 + 课程1人(最小可行团队)
- 种子融资:¥50-80万(覆盖Phase 1-3全部研发+首批量产)


 1
1 0
0


 已为社区贡献43条内容
已为社区贡献43条内容

所有评论(0)